基于LQG-PID的EPS系統最優控制
2015-02-17 09:16:18邵憲友李志鵬楊傳英李曉英
重慶理工大學學報(自然科學) 2015年9期
邵憲友,李志鵬,楊傳英,李曉英
(東北林業大學 交通學院,哈爾濱 150040)
基于LQG-PID的EPS系統最優控制
邵憲友,李志鵬,楊傳英,李曉英
(東北林業大學 交通學院,哈爾濱 150040)
汽車電動助力轉向(EPS)系統因受系統本身模型參數不確定性、路面隨機激勵和轉矩傳感器的測量噪聲等干擾因素的影響,使用傳統PID控制方法已不能滿足對其精確控制的要求。通過構建EPS系統的數學模型,并加入隨機干擾信號,建立系統的狀態空間表達式,在PID控制的基礎上設計線性二次型高斯(LQG)狀態反饋控制器,即優化的LQG-PID控制。以能耗最小為目標函數,運用Matlab/Simulink對EPS系統進行仿真分析。仿真曲線表明:應用LQG-PID控制方法能有效減小系統受到的隨機干擾,使能耗及電動機的實際助力電流與目標電流的誤差最小,提高了EPS系統的魯棒性。
電動助力轉向系統;PID控制;LQG-PID控制器;最優控制
電動助力轉向系統(electric power steering system, EPS)通過ECU接收力矩信號和車速信號,并經運算處理后向電動機發出控制指令,使電動機通過輸出一個轉矩來提供轉向助力,減小駕駛員操縱力,進而提高汽車轉向的輕便性和靈活性[1-2]。汽車EPS技術是一項低能耗、低污染,有利于能源的節約和環境保護,緊扣現代汽車產業發展趨勢的高新技術,其研究具有重大現實意義。但因EPS系統存在著較復雜的非線性因素的干擾( 例如來自道路路面的隨機干擾、EPS模型參數輸入的不確定性以及傳感器產生的測量噪聲等),應用傳統PID控制已不能滿足其控制要求。為解決這個問題,需要采用現代最優控制理論。此理論是一種運算精確的數學解析方法,可對EPS系統性能指標進行最優化,使系統性能達到所需要求。在以現代控制理論方法為基礎的理論研究中,較常見且又有效的控制設計方法是線性系統二次型性能指標高斯分布法(linear quadratic Gaussian,LQG)。LQG最優控制實質上是以能耗及電機輸出的實際助力電流與目標電流之間的誤差最小為控制系統的性能指標,使EPS系統對輸入參數的變化不敏感,進而使其具有較強的抗干擾性,即較好的魯棒性。
本文首先建立EPS系統的數學模型,并加入隨機干擾信號,建立系統的狀態空間表達式,以能耗最小為目標函數,在PID控制的基礎上設計LQG最優控制器,即優化的LQG-PID控制。采用雙閉環控制,內環應用LQG優化控制,外環應用PID控制方法,從而降低 EPS系統受到的非線性因素所引起的干擾。
1 EPS系統數學模型的建立
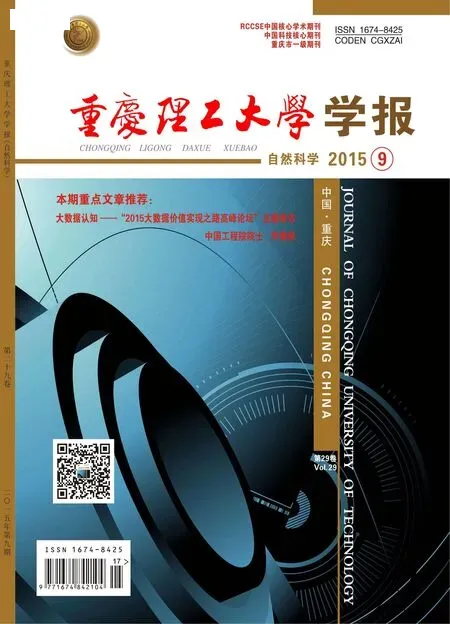
汽車EPS是主要由扭矩傳感器、車速傳感器、電動機、減速機構、電機控制單元(ECU)及控制策略等組成,是一種直接通過電機提供輔助扭矩的動力轉向系統,其結構如圖1所示。
圖1 EPS結構
1.1 EPS系統的數學模型
對組成電動助力轉向系統的轉向管柱、助力電機和齒條分別進行受力分析,并將系統中阻尼的非線性部分忽略,得到轉向管柱、齒條和電機的數學模型[3]:
(1)
(2)
(3)
(4)
(5)
(6)
式(1)~(6)中:kc為轉矩傳感器扭桿剛度;Jc為方向盤、轉向管柱的等效轉動慣量;bm為電機軸和蝸桿總成等效阻尼系數;bc為轉向管柱阻尼系數;Jm為電機軸轉動慣量;m為齒條質量;br為齒條阻尼系數:kr為等效彈簧剛度;G為減速器的減速比;θc為方向盤轉角;km為減速機構和助力電機樞軸等效剛度系數;Td為方向盤輸入轉矩;θm為電機轉角;xr為齒條位移;rp為小齒輪半徑:ke為電機反電勢系數;L為電機電感;u為電機控制電壓;R為電機電樞電阻。
1.2 EPS系統的狀態空間方程
(7)
假定各個狀態變量為
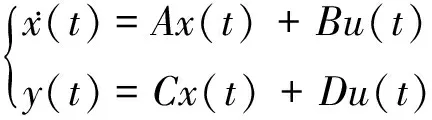
式中a是由助力特性曲線(圖2)中所測方向盤轉矩Td與電動機的目標電流im之間的關系得出:im=a(Td-T0),其中T0=1 N·m。
將各變量代入式(1)~(6),得EPS系統的狀態方程為:
(8)
式中:A為
B為
D=0
圖2 電動助力特性曲線
2 LQG-PID最優控制
2.1 常規PID控制
PID控制[4]又稱為比例積分微分控制,實際上是屬于線性控制的一種,它是依據輸入系統的偏差值,再按照比例、微分與積分函數關系來運算,并將計算結果的加權和作為系統的控制量對受控對象施加控制,其原理如圖3所示。
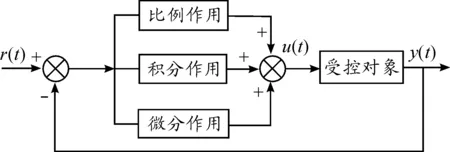
圖3 PID控制系統原理
首先由標準值r(t)與實際輸出值c(t)組成系統的控制偏差e(t)=r(t)-c(t)。再將偏差的比例值P、積分值I與微分值D線性組合來構成控制量,對受控對象施加控制,其控制規律為
(9)
式中:Kp為比例系數;Ti為積分時間常數;Td為微分時間常數。
2.2 LQG-PID最優控制
EPS系統會受一些不確定性因素影響,例如來自道路路面的隨機干擾、EPS模型參數輸入的不確定性以及傳感器產生的測量噪聲等。然而LQG最優控制[5]可以使EPS系統對輸入參數的變化不敏感,從而使系統具有較強的抗干擾性,即較好的魯棒性,所以在PID控制的基礎上設計了LQG最優控制器,即優化的LQG-PID控制,以能耗最小為目標函數,采用雙閉環控制,內環應用LQG優化控制,外環應用PID控制方法,從而降低了EPS系統受到的非線性因素所引起的干擾。控制結構如圖4所示。
設EPS系統的狀態空間表達式為:
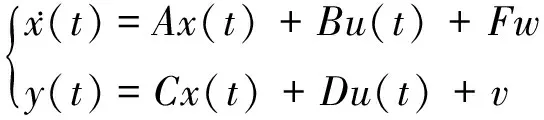
(10)
式中:v為輸入的測量噪聲;w為輸人的系統路面隨機干擾。
w和v為已知方差、協方差和零均值的高斯白噪聲,兩參數的統計特性規律為:
(11)
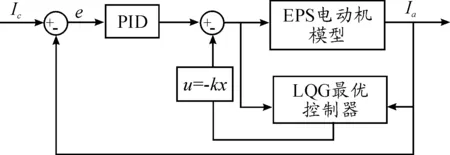
圖4 LQG-PID控制結構
以助力電流誤差最小為目標函數的LQG控制器的性能指標為
(12)
式中I為實際助力電流。在式(12)的平方和中,以u為基準,將其系數取l,q為助力電流產生誤差時的加權系數。為得到合適的q,應在仿真中進行調試后確定。由最優控制理論原理,將式(12)轉化為標準二次型形式:
其中Q為
F=[0 0 0 0 1 0 0]T
R=1
由控制系統的狀態方程可以構建出一個系統的最優狀態估計器,即卡爾曼(Kalman)濾波器,最優估計器方程的表示方法如下:

(13)
卡爾曼[6]濾波增益矩陣為
(14)
其中P0滿足黎卡提[7](Riccati)方程:
(15)
在狀態估計計算時先用卡爾曼濾波理論求得的狀態最小方差的估計量,式中L是Kalman濾波器的增益矩陣。在得到狀態估計后,再與最優控制以串聯的形式形成反饋回路,對其進行控制,最優控制規律為
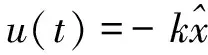
(16)
其中最優反饋增益矩陣k由下式得到:
k=R-1BTP
(17)
式中P滿足下列黎卡提(Riccati)方程:
(18)
LQG閉環最優控制器的計算由完全獨立的兩部分來完成:第1部分是按照最優估計器的計算式(13)~ (15)來求得狀態估計,其中卡爾曼濾波器矩陣L可以通過Matlab軟件工具箱中lqe命令求得,其程序格式為
L=lqe(A,F,C,Q0,R0)
其中Q0=R0=1。第2部分是按照式(17)、(18)來求得最優反饋增益矩陣k。矩陣k可以通過Matlab軟件工具箱中lqr命令求得,其程序格式為
k=lqr(A,B,Q,R)
3 Matlab/Simulink建模及仿真分析
3.1 EPS系統的Matlab/Simulink建模
汽車EPS系統模型包括機械轉向系、控制器和電機模型,機械轉向系模型由轉向管柱和齒條模型組成。在Matlab/Simulink中建立EPS系統各組成部分模型,轉向管柱和齒條模型如圖5、6所示,電機模型如圖7所示,機械轉向系和電機的整體模型如圖8所示,控制器模型如圖9所示,圖中的助力特性曲線見圖2。模型中:Td為方向盤的輸入轉矩;Ts為轉矩傳感器測量值;I為電動機的實際助力電流;Um為電動機的控制電壓。外環PID控制模型如圖10所示,內環LQG最優控制結構如圖11所示。
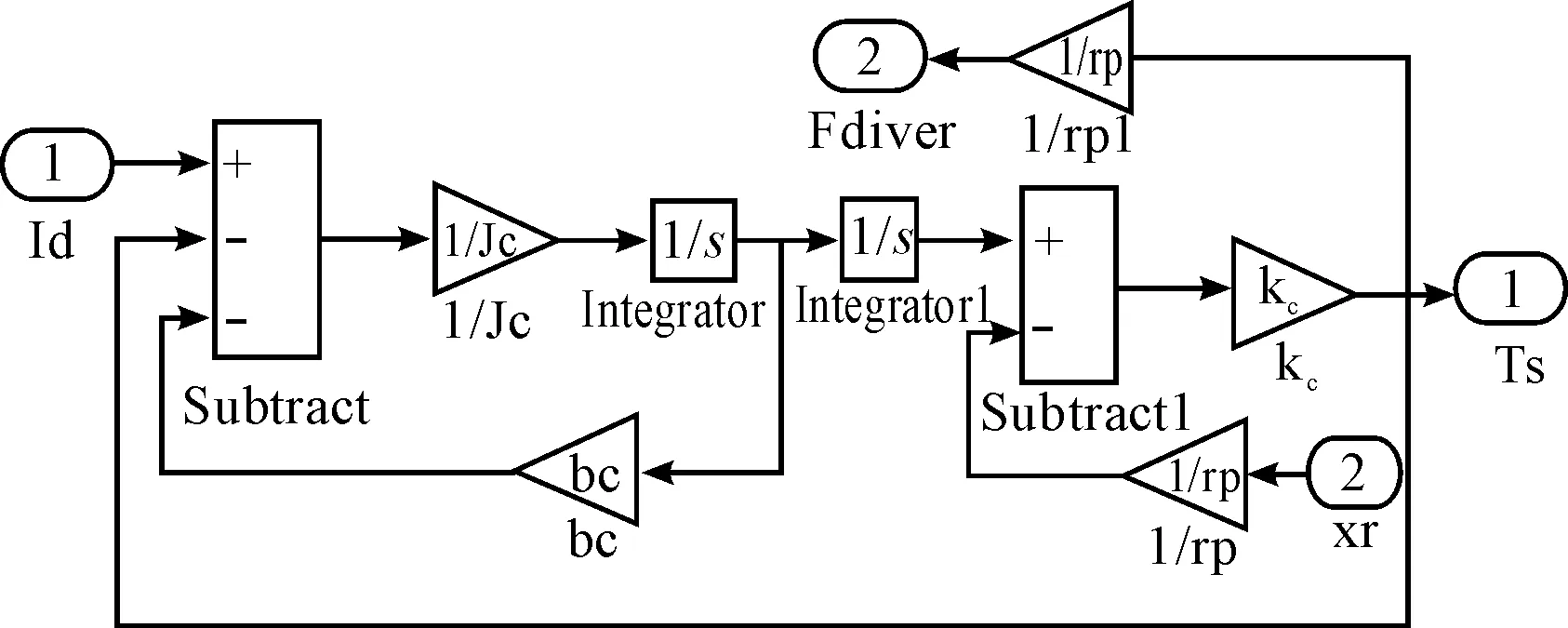
圖5 轉向管柱模型
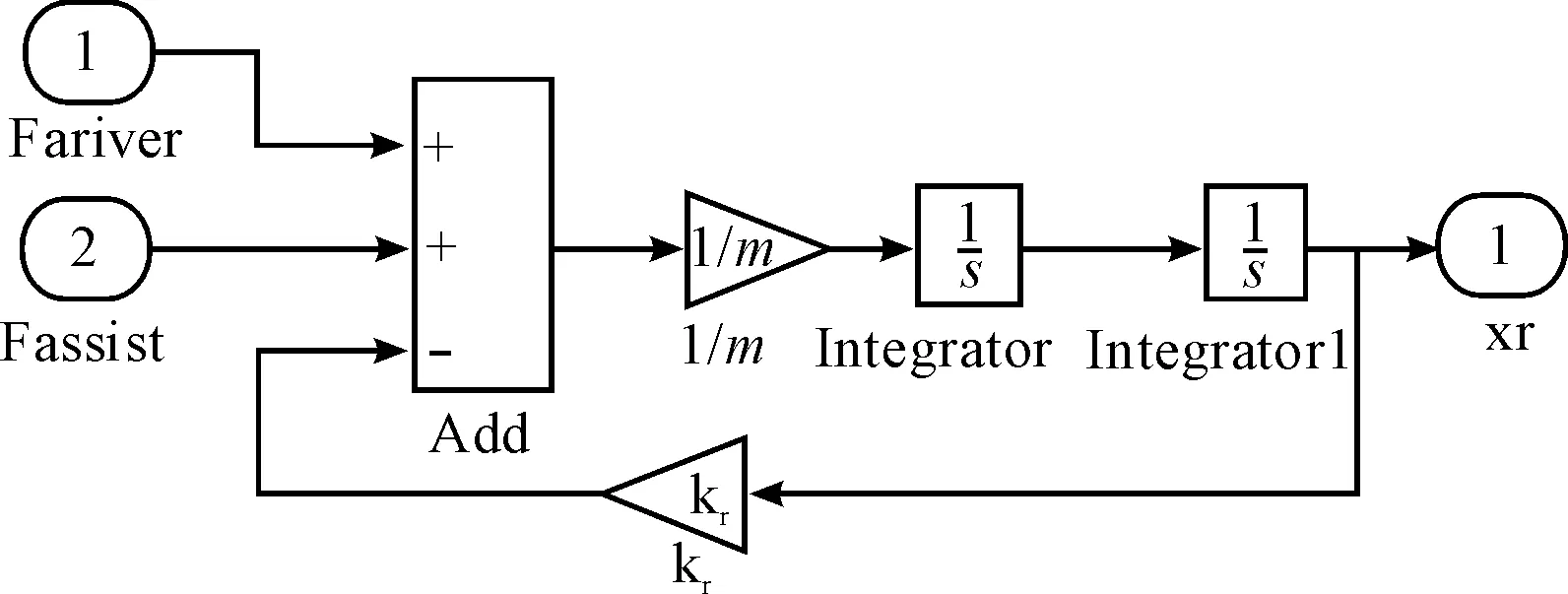
圖6 齒條模型
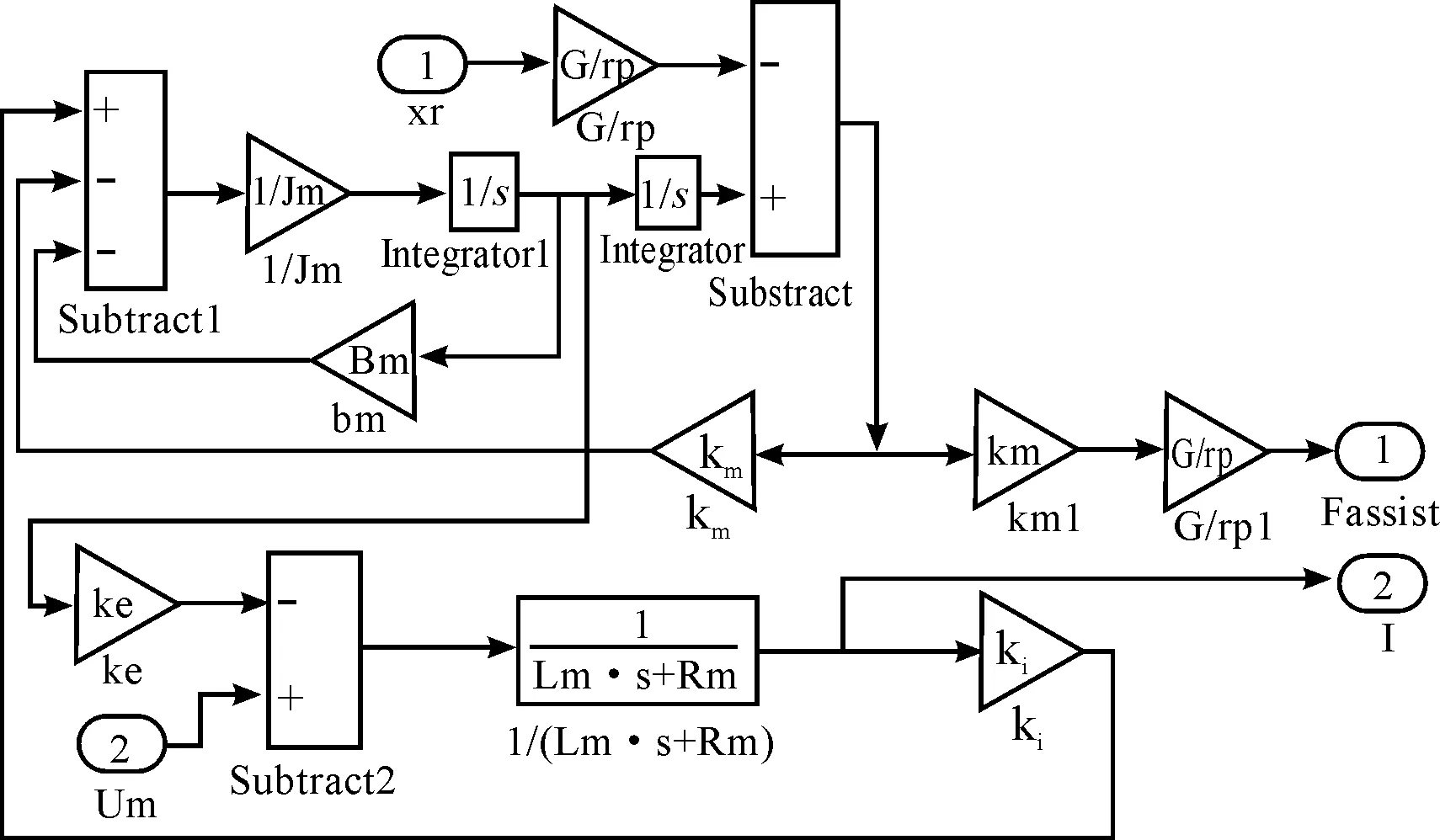
圖7 電機模型
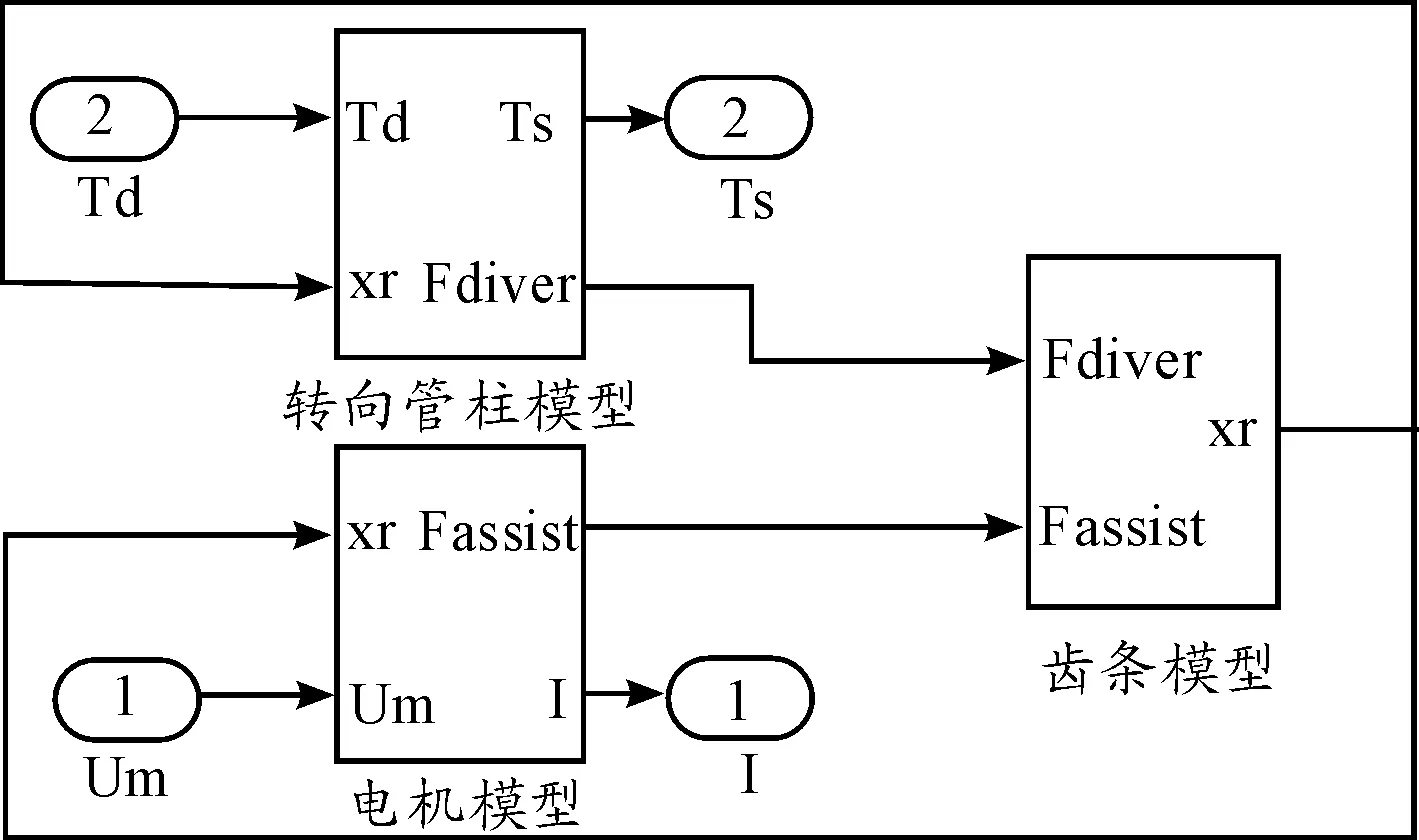
圖8 機械轉向系和電機模型

圖9 控制器模型
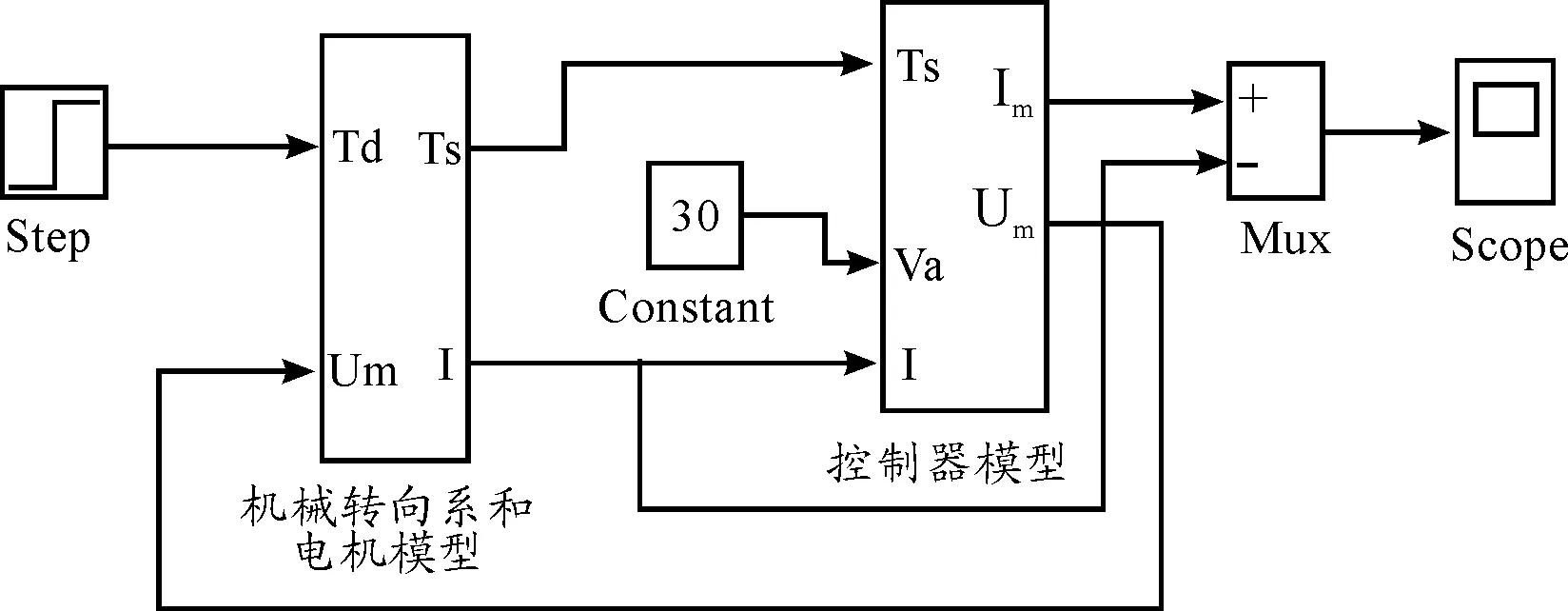
圖10 PID控制模型
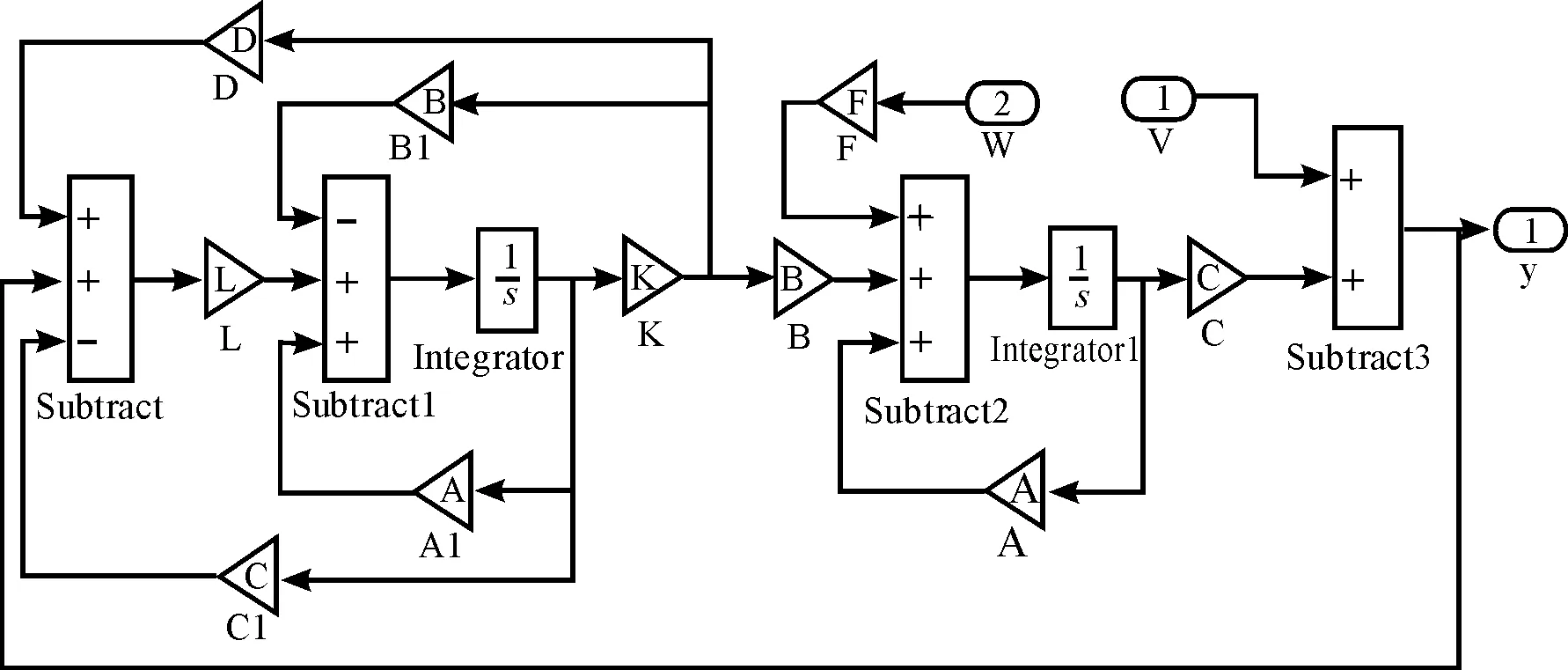
圖11 LQG最優控制模型
3.2 仿真分析
應用Matlab7.1中的控制工具箱,分別采用PID控制和LQG-PID兩種控制策略[8]對EPS系統進行仿真分析。仿真模型的主要參數見表1。
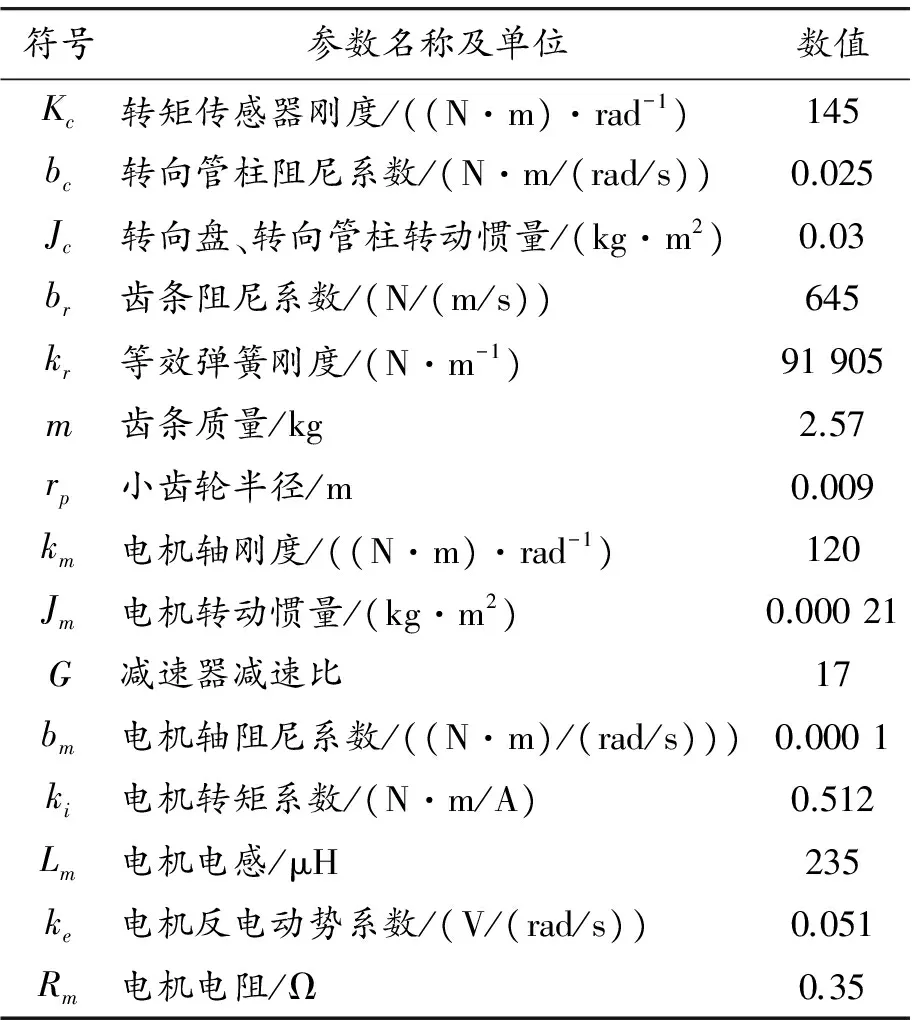
表1 仿真模型所用主要參數
設在路面隨機噪聲w(k)的方差輸入值為0.135,測量噪聲v(k)的方差輸入值為0.079的干擾情況下,車速v取值為30 km/h,轉向盤輸入轉矩為約35 N·m的階躍信號,通過對電流誤差加權系數q的不斷仿真調試,最后當q取21時,系統的性能達到最佳[9]。 轉向盤經過電機助力作用后所受到的轉矩如圖12所示。 由圖中可以看出:LQG-PID控制與傳統PID控制相比,轉矩的響應波動相應較小,而且輸出響應較平穩。圖13是電機在兩種控制策略下,車速為30 km/h時實際輸出助力電流與目標助力電流的階躍響應曲線。圖14是車速為60 km/s時,電動機實際輸出助力電流與目標助力電流的響應曲線。可以看出隨車速的增加,助力電流減小,即電動機提供的助力減小,車輛行駛穩定性提高,且LQG-PID控制能使電動機的實際助力電流與目標電流之間的誤差最小,即使EPS系統具有良好的抗干擾性。

圖12 轉矩階躍響應
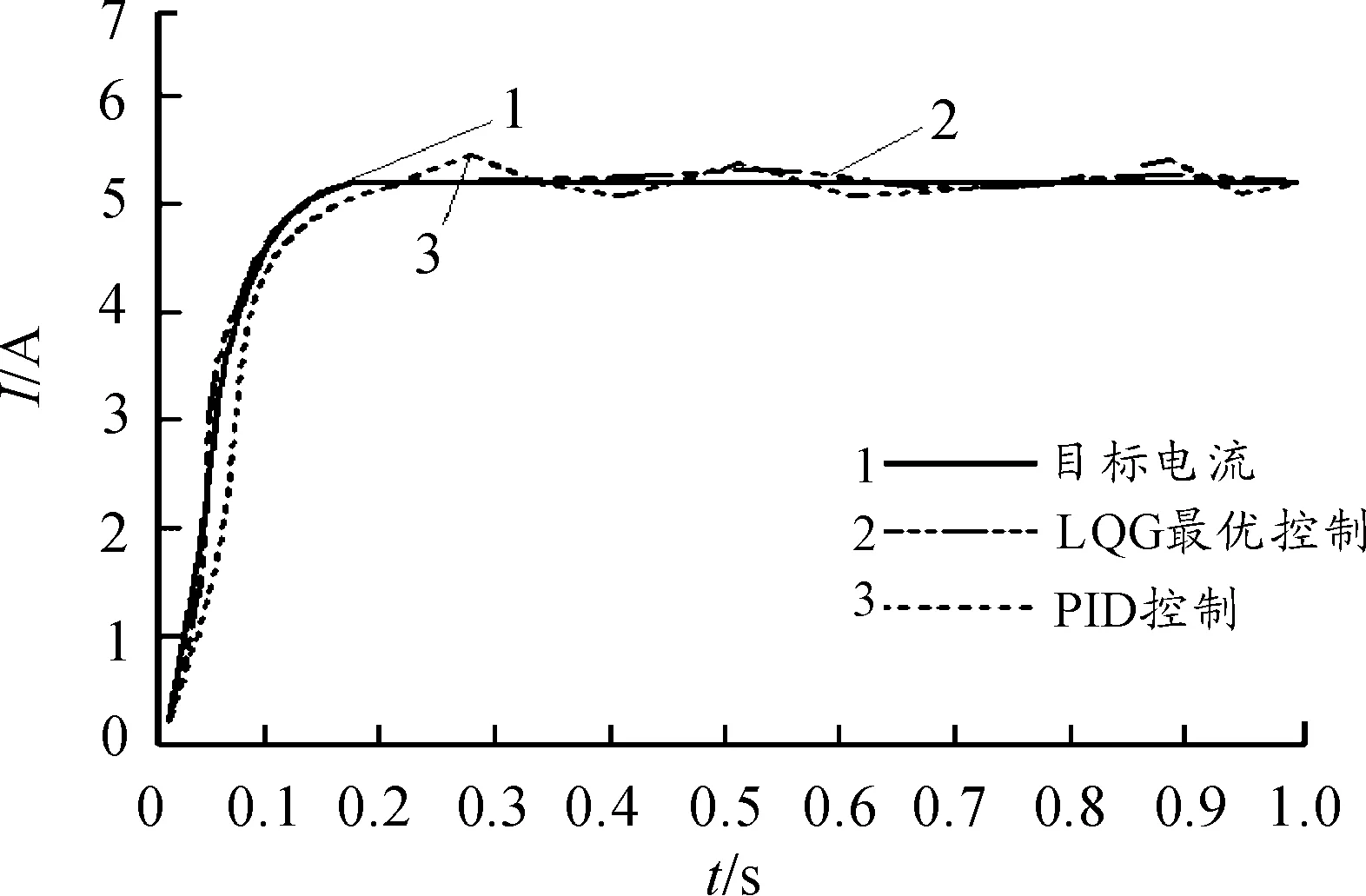
圖13 車速為30 km/h時電機助力電流階躍響應曲線
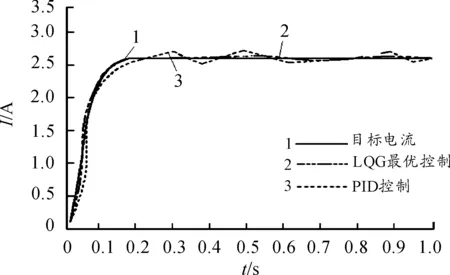
圖14 車速為60 km/h時電機助力電流響應曲線
4 結束語
通過對EPS系統進行數學建模并進行仿真分析可見,本文設計的LQG-PID最優控制器使助力后轉矩的輸出響應波動較小且平穩,電動機的實際助力電流與目標電流之間的誤差最小,即能有效降低系統本身的模型參數不確定性、路面隨機激勵以及轉矩傳感器測量噪聲等因素的干擾,提高EPS系統的魯棒性。
[1] 李偉,宋曉華.基于MSC1210單片機的汽車電動助力轉向ECU系統的開發[J].客車技術與研究,2012(1):8-10.
[2] 夏天,陳龍,黃晨,等. EPS模糊滑模變結構控制仿真及試驗研究[J].重慶理工大學學報:自然科學版,2014(3):17-21.
[3] 盧娟.電動助力轉向系統建模與仿真研究[D].重慶:重慶大學,2006.
[4] 田正新.汽車電動助力轉向控制策略的研究及聯合仿真分析[D].長沙:湖南大學,2012:37-39.
[5] 高士香.汽車電動助力轉向系統LQG最優控制研究[D].淄博:山東理工大學,2009.
[6] Li Ke.Robust control for electric power steering system[D].Canada:University of Windsor,2004.
[7] Chen Xiang,Chen Xiaoqun,Li Ke.Robust control of electric power-assisted steeringsystem[M].USA:IEEE,2005:101-105.
[8] 陳無畏,王妍.汽車電動助力轉向系統的自適應LQG控制[J].機械工程學報,2005,41(12):27-30.
[9] 巨永鋒,李登峰.最優控制[M].重慶:重慶大學出版社,2005.
(責任編輯 劉 舸)
Based on LQG-PID Optimal Control of EPS System
SHAO Xian-you, LI Zhi-peng, YANG Chuan-ying, LI Xiao-ying
(Traffic College, Northeast Forestry University, Harbin 150040,China)
Due to the system itself uncertainty of model parameters, road random excitation and torque sensor measurement noise and other factors interference, using traditional PID control methods cannot meet the precise control of the Electric Power Steering (EPS) system. By building a mathematical model of the EPS system and adding random noise signal, we created a system of state space expression and designed linear quadratic Gaussian on the basis of PID control (LQG) state feedback controller that was optimized LQG-PID control. With minimum energy consumption as objective function, using Matlab/Simulink simulation analysis of EPS system, the resulting simulation curves show: application of LQG-PID control method can effectively reduce the system subject to random disturbances, the error of the actual energy consumption and electric motor assist current and target current minimum, which improves the robustness of the EPS system.
electric power steering system; PID control; LQG-PID controller; optimal control
2015-05-28 基金項目:黑龍江省自然科學基金資助項目(E050301)
邵憲友(1990—),男,黑龍江五大連池人,碩士研究生,主要從事汽車電子控制技術研究;李志鵬(1963—),男,黑龍江哈爾濱人,博士,教授。主要從事汽車電子控制技術研究。
邵憲友,李志鵬,楊傳英,等.基于LQG-PID的EPS系統最優控制[J].重慶理工大學學報:自然科學版,2015(9):42-47.
format:SHAO Xian-you, LI Zhi-peng, YANG Chuan-ying, et al.Based on LQG-PID Optimal Control of EPS System[J].Journal of Chongqing University of Technology:Natural Science,2015(9):42-47.
10.3969/j.issn.1674-8425(z).2015.09.007
TM572
A
1674-8425(2015)09-0042-06
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
英語世界(2022年9期)2022-10-18 01:11:18
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
金橋(2020年9期)2020-10-27 01:59:44
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
家庭影院技術(2017年9期)2017-09-26 03:41:45