智能控制算法在打樁機系統中的應用
2015-02-21 06:49:02劉瑋倩周振東陳忠孝
電子設計工程 2015年18期
秦 剛,劉瑋倩,劉 千,周振東,陳忠孝
(1.西安工業大學 電子信息工程學院,陜西 西安 710021;2.海軍駐西安地區軍事代表局 西安市70號信箱402分箱海軍代表,陜西 西安710056)
智能控制算法在打樁機系統中的應用
秦 剛1,劉瑋倩1,劉 千2,周振東1,陳忠孝1
(1.西安工業大學 電子信息工程學院,陜西 西安 710021;2.海軍駐西安地區軍事代表局 西安市70號信箱402分箱海軍代表,陜西 西安710056)
打樁機系統工作過程中會遇到各種各樣的復雜地形,為了提高自動沖孔打樁機對復雜地形的打樁能力和適應性,文中從打樁機起錘信號的處理、余繩最優控制算法及專家控制系統等方面來進行研究。采用FFT變換算法,將采集到的時域信號變換成頻域信號進行分析處理,消除了雜波信號的干擾,提高了系統對起錘信號檢測的穩定性。采用模糊自適應控制算法來對余繩進行研究,使沖孔打樁機控制設備根據不同的目標土層對余繩的長度進行適應性調整。采用專家控制系統,以提高沖孔打樁機對復雜地質環境的適應能力。最終通過Matlab仿真及反復實驗,分析得出,文中算法和控制策略對復雜地形有很好的處理能力。
自動打樁機;專家控制系統;余繩最優控制算法;FFT;Matlab
目前,沖孔打樁機多由人工手動機械式操縱完成,當遇到復雜環境時(斜巖),需要采用添加石子和泥沙混合物直到出現水平打樁面,反復以上步驟,才能繼續作業。同時對施工人員有極高的要求,且勞動強度大,安全系數低,施工質量難以保證。所以本文通過采用專家控制系統、余繩最優控制算法、FFT變換算法等,提高打樁機系統的高效性和適應性。
1 專家控制系統
專家控制系統最核心的部分是專家控制器,其包含有專家知識庫、知識獲取、知識推理和知識表達規則集這4個模塊。專家控制系統結構框圖如圖1所示。

圖1 專家控制系統結構框圖Fig.1 Expert control system structure diagram
專家控制系統的控制過程如下:專家知識庫里涵蓋了復雜環境信息、余繩長度信息和泥漿濃度信息等。系統通過反饋信息獲得當前地質環境的知識,依據知識庫中的知識進行知識推理,與知識庫中的信息進行掃描和對比,再根據控制規則表對余繩長短進行自適應調整,然后通過知識表達規則集輸出到執行機構上。同時,又可以向用戶進行解釋推理,并且將當前事實記錄添加到余繩控制規則表中,通過人機接口來完成知識庫的維護和更新。
專家控制器最核心的部分是知識庫。專家知識庫主要由事實數據庫、經驗數據庫和知識規則庫組成。其中最底層的事實數據庫主要存放被控對象或被控過程的靜態知識和動態知識,本文事實數據庫存放的是建筑工程中打樁機領域的專業基礎知識,例如打樁的地質環境,氣候條件等;中間一層的經驗數據庫用來存放基于事實數據庫中知識的專家經驗,本文經驗數據庫存儲的是在打樁機領域的一些專家經驗;最高層的知識規則庫是數據庫中知識的表達方式,知識規則的產生有多種方式,本系統采用產生式的方法來建立相應的知識規則庫,這種規則的表示方式更加便于專家數據庫的內容得到實時更新。
知識推理是指依據專家知識庫中的規則從事實知識庫推理出結論的過程。知識推理的方法一般有3種,即正向推理、逆向推理和混合推理。由于本系統設計的專家控制系統中,專家知識庫內容比較少,所建立的規則也不多,知識推理就比較簡單,故多采用正向推理方法進行知識推理。如圖2所示為專家控制系統推理機的推理流程圖。
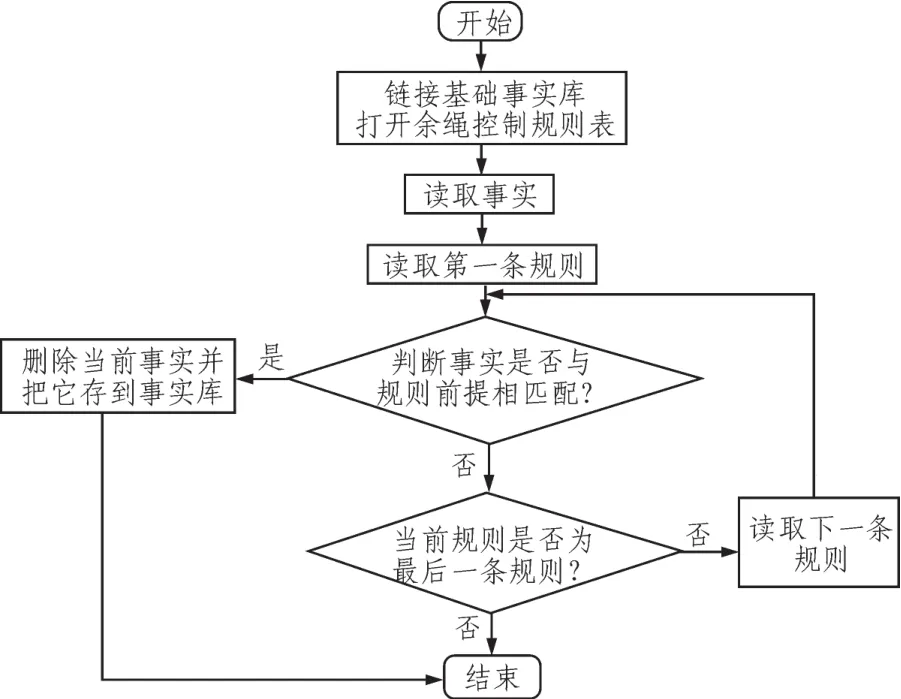
圖2 專家控制系統推理流程圖Fig.2 Expert control system inference flow chart
在知識推理過程中可以利用數學模型來表達,表達式為:

專家控制器根據專家知識K對輸入信息E進行知識推理,然后根據推理結果I輸出相應的控制結果U。
2 余繩模糊控制算法
在打樁過程中,樁錘通過自由落體所產生的重力帶動繞線器加速轉動,如果不能及時對繞線器進行點剎,鋼絲繩就會繼續下落,再加之后的離合時間,就會造成余繩長度過長,降低了打樁機的工作效率,還易于產生吸錘、卡錘等故障;而如果點剎太早,會使余繩太緊,將導致樁錘未能到達樁底或剛好到達樁底,不僅會使打樁失效,還會因突然剎車產生的外力繃斷鋼絲繩,同樣存在安全隱患。因此,對于余繩的控制至關重要。
對余繩進行精確控制的關鍵是模糊控制算法的運用。由于沖孔打樁機余繩的控制沒有精確的數學模型,不確定因素眾多,非線性特性明顯,同時還存在多參數變化和外界干擾多等控制難點,所以采用帶“不同等級修正因子的自適應模糊控制器”進行實時控制。該控制器實際上是一種對誤差和誤差變化率的加權控制方案,通過給修正因子取不同的值,實現輸入和輸出誤差值的修正,以便適應被控對象的不同要求。這樣模糊控制器具有一定的通用性和適應性,從而使得打樁機的余繩控制能夠適應多種復雜地形。最常用加權關系采用式是U= AE+(1-A)C,式中E為誤差,C為誤差變化率,A是加權系數。改變A的大小可以實現對輸入和輸出誤差及誤差變化率的不同加權。A的取值大小有兩個基本準則:1、對于響應速度慢的系統,誤差加權值應較小;2、當被控對象階次數較低時,誤差加權值應大于誤差變化率的加權值。但上述帶有一個修正因子的加權關系無法滿足打樁機余繩控制的要求,因此提出不同修正因子針對不同誤差等級的方法,E小時用A1,E中等時用A2,E大時用A3。

其中,A1,A2,A3∈(0,1)。A1,A2,A3為不同值時可以有不同的控制決策表。同時還可以根據實際打樁環境的需要將余繩控制的等級分的更多更細,可使控制規則和方法變得更加靈活,滿足不同狀態下的打樁作業和工程實施。
文中通過參照《沖孔灌注樁施工工藝》中的相關內容,按照不同地質環境的施工要求,制定表格如表1所示。
3 FFT算法
沖孔打樁機的工作環境非常復雜,對主控電路板而言,會受到外界各種干擾信號的影響,尤其是對起錘信號的干擾,而起錘信號的檢測又是整個沖孔打樁機系統正常穩定工作的關鍵環節。因此,對起錘信號進行處理至關重要。本文將起錘信號進行FFT變換處理,對信號進行頻域分析。首先在采集的起錘信號波形中取長度為N的時域序列X(n),X(k)為起錘信號的頻域序列,取旋轉因子為,將時域序列X(n)按n的奇偶性分為兩組,即n=2r及n=2r+1兩組,可得以下公式,如4式所示:

表1 余繩控制規則表Tab.1 The control rule table of rest rope

通過(4)可知偶數點樣本計算G(k),奇數點樣本計算H(k)。由基2時間抽取時間算法將時域周期進行第一次二分,可以得到,故得公式(5):

通過以上公式可以發現,將時域不斷進行分解,按時間抽取算法可知在盡量小的序列上進行離散傅里葉變換,得到頻域序列X(k)。
經過反復試驗,得出利用FFT變換算法對起錘信號進行處理,使得起錘信號波動幅度減小,輸出波形毛刺降低,同時還提高了起錘信號的采集速率,節省了微控制器的運算時間,提高了打樁機的工作效率,保證了沖孔打樁機的高效穩定運行。
4 Matlab仿真實驗
為了驗證起錘信號經過FFT變換后的明顯變化,本文采用Matlab軟件對所采集到的起錘信號數據進行仿真實驗。首先,通過Codewarrior調試軟件對起錘信號進行數據采集,截取500個時域數據后,在Matlab軟件中對這500個數據進行FFT變換仿真,并得到相應的波形圖。
通過Matlab仿真后的波形圖如圖3所示。

圖3 FFT仿真結果圖Fig.3 The FFT simulation results
通過對仿真結果進行分析容易得出,時域信號經過FFT變換成頻域信號后,消除了毛刺,有效地防止雜波信號的干擾。因此,對起錘信號進行頻域分析,明顯提高了沖孔打樁機的穩定性和可靠性。
5 結束語
在原有的自動沖孔打樁機的基礎上,通過引進FFT變換算法對起錘信號進行處理,將時域信號變換成頻域信號,進行頻域分析。采用模糊自適應控制算法來對余繩進行分析處理,使打樁機根據不同的目標土層對余繩長度進行適應型調整。采用專家控制系統,根據地質類別、余繩長度、沖程距離、泥漿比重等指標,構建專家知識庫進行數學建模,使設備能夠根據不同地質環境推理出相應的控制策略,從而增加沖孔打樁機控制設備對復雜地形環境的適應能力。本文的研究有效提高了沖孔打樁機的工作效率,增強了打樁機對環境的適應性,降低了施工人員的勞動強度,在很大程度上節約了成本,滿足了人們對建筑施工質量越來越高的要求。例如,國家高速公路-G75蘭海高速公路的武罐高速施工段第十四標段廣泛應用了本文設計的沖孔打樁機,并且在G7011十天高速公路段旬陽、略陽、洋縣、鎮巴、天水等地也得到了非常廣泛的應用,得到了施工人員的好評,沖孔打樁機有著非常可觀的市場前景。
[1]白曉軍,賴滌泉.樁基工程中沖孔打樁機的應用及展望[J].石家莊鐵道學院學報.2009(6):93-96.BAI Xiao-jun,LAI Di-quan.Application and prospect of the pile foundation engineering pile punching machine[J].Journal of Shijiazhuang Railway Institute,2009(6):93-96.
[2]鄧長峰.多功能打樁機.中國,200610070513.5[P].2007-05-09.
[3]李廷,徐振華.錘擊管樁沉樁過程模擬與算法[J].鐵道科學與工程學報,2010(4):67-73.LI Ting,XU Zhen-hua.Simulation and algorithm process of Hammer pile[P].Journal of Railway Science and Engineering,2010(4):67-73.
[4]Zimmerman Joshua D,Williamson Christopher A,Pelosi Matteo,et al.Energy consumption of an LS excavator hydraulic[J].ASME Int Mech Eng Congress Expos Proc.2008,(4):117-126.
[5]沈傳風,黃洪全,等.基于嵌入式系統的火警控制器的網絡研究[J].自動化與儀表,2006(5):8-11.SHEN Chuan-feng,HUANG Hong-quan,et al.Study of fire alarm system controller based on ARM [J].Automation and instrumentation,2006(5):8-11.
[6]謝永健,朱合華,王懷忠,等.打樁錘擊模型的解析算法[J].巖石力學與工程學,2005(1):171-176.XIE Yong-jian,ZHU He-hua,WANG ZHong-huai,et al.The parsing algorithm model of pile hammer impact[J].Rock mechanics and Engineering,2005(1):171-176.
Application of intelligent control algorithm in the piling machine system
QIN Gang1,LIU Wei-qian1,LIU Qian2,ZHOU Zhen-dong1,CHEN Zhong-xiao1
(1.The Electronic Information Engineering College of Xi’an Technological University,Xi’an 710021,China;2.The Military Representative Office of Navy in Xiˊan Area,The Naval Representative of No.70 box 402 box,Xiˊan 710056,China)
The piling machine system working will encounter all sorts of complex terrains,in order to improve the piling capability and adaptability of automatic punching pile driver for complex terrain,the paper research for piling hammer starting signal processing,the optimal control algorithm of excess rope,expert control system and other aspects.Using FFT algorithm,collected time-domain signal is changed into frequency-domain signal to analysis and process,eliminating the interference of clutter signal and improving the stability of hammer signal detection for the system.Adopting fuzzy control algorithm to research for the excess rope,making punching hammers adjust the length of the excess rope depending on the target soil.Using specialistic controlling system to improve the adaptability of automatic punching pile driver to complex geological environment.Finally,through the Matlab simulation and experiments it can be seen that the algorithm and control strategy can manage effectively the complex geological environment.
automatic punching pile driver;Specialistic control system;Optimal control algorithm of excess rope;FFT;Matlab
TN9
:A
:1674-6236(2015)18-0093-03
2014-12-23稿件編號:201412216
陜西省科學技術研究發展計劃項目(2014K05-44)
秦 剛(1968—),男,陜西西安人,教授。研究方向:電子工程、電子儀器與檢測。
猜你喜歡
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
中國科技信息(2016年14期)2016-07-31 21:16:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
