距離選通激光主動成像技術在直升機中的應用
2015-02-24 01:48:44姚有文
直升機技術 2015年4期
關鍵詞:系統
趙 云,姚有文,張 斌
(1.總參陸航部駐景德鎮地區軍事代表室,江西 景德鎮 333001;2.61213部隊,山西 臨汾 041000)
?
距離選通激光主動成像技術在直升機中的應用
趙 云1,姚有文1,張 斌2
(1.總參陸航部駐景德鎮地區軍事代表室,江西 景德鎮 333001;2.61213部隊,山西 臨汾 041000)
以提高直升機作戰性能為出發點,綜述了距離選通激光主動成像技術和穩瞄技術的現狀,分析了距離選通激光主動成像技術應用于直升機穩瞄系統的可行性和先進性。距離選通激光主動成像技術是提高直升機整體性能的重要技術手段,是直升機穩瞄系統的發展方向。
直升機;距離選通;激光成像
0 引言
直升機作為陸軍航空兵的主戰裝備,具有快速機動、精確打擊、偵察預警、信息作戰、電子對抗等作戰能力,已成為現代戰爭中奪取低空制空權的利器,在遂行非軍事行動中也發揮著越來越重要的作用。
光電穩瞄系統是直升機的眼睛,是直升機的重要系統之一。它主要實現戰場搜索、目標瞄準、跟蹤、激光測距和激光指示,為火控系統武裝發射提供瞄準線指向功能,是直升機升級換代和信息化改造的重中之重。現代武裝直升機機載光電穩瞄系統一般配有電視跟蹤、紅外探測和激光測距功能,基本能夠滿足飛行員的需要。但電視和紅外探測屬于被動探測,易受自然條件和敵方的干擾;激光測距只能獲得敵方的距離信息,功能單一。為適應未來戰場態勢的需要,必須對穩瞄系統的光電探測技術進行不斷的探索。本文對將距離選通激光主動成像技術應用于直升機穩瞄系統進行了簡要分析。
1 距離選通激光主動成像技術
1.1 工作原理
基于距離選通的激光主動成像技木(GVT)原理[1]如圖1所示。距離選通激光主動成像系統(GVS)利用高峰值功率的脈沖激光器照射目標,利用高精度門控電路延時觸發窄快門面陣成像探測器(一般為像增強型CCD,即ICCD),接收目標反射光并成像。由于激光在往返途中探測器快門關閉,可以有效地抑制背景噪聲和雜波干擾,因而能有效提高對小、暗、遠目標的識別能力。另外,所得目標圖像對應了一定的距離深度,可以通過圖像處理得到目標的三維信息,并且有距離選通和分辨率高的特點。
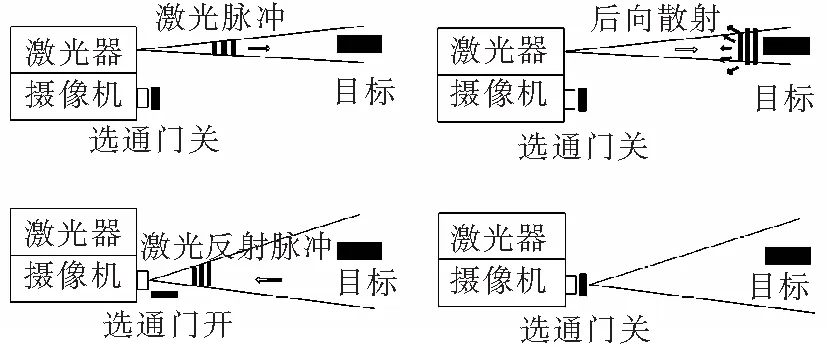
圖1 距離選通激光主動成像系統工作原理
1.2 系統組成
從距離選通激光主動成像技術的工作原理可以看出,它有三個基本特征:采用脈沖激光照明;采用窄快門脈沖成像器件;由門控電路實現高精度延時控制。因此,GVS一般由激光器、選通型ICCD攝像機和延遲同步控制電路等構成。GVS器件的選擇不盡相同:激光照明多種多樣,主要有532nm的YAG激光器、人眼安全的1.57um激光器和半導體陣列激光器等;成像器件一般選用超二代ICCD、三代ICCD、電子轟擊CCD(EBCCD)等;門控電路的控制方法和精度需根據不同的應用場合選用不同的同步時序方法。
2 直升機光電技術應用現狀
2.1 發展歷程[2]
目前,光電技術在直升機中的應用具有代表性的主要有瞄準線穩定系統、偵察系統、夜間飛行導航系統、光電對抗系統等,其中以穩瞄系統最具有代表性。直升機穩瞄系統按性能和時間可以大致分為三代:
第一代直升機穩瞄系統主要在20世紀70年代末至80年代初裝備使用,如美軍的AH-l“眼鏡蛇”直升機的M65穩瞄系統、法國“小羚羊”直升機M397穩瞄系統等。這一階段主要是白天型,全部采用直視光學通道觀察瞄準。
第二代直升機穩瞄系統在20世紀90年代初期裝備使用,在此期間武裝直升機獲得了飛速發展,如美軍的AH-64“阿帕奇”、OH-58D“基奧瓦”、意大利的A-129“貓鼬”、南非的AH-2A“茶隼”、前蘇聯的米-28“浩劫”和卡-50“黑鯊”等一批世界著名的武裝直升機。與此同時,紅外技術也獲得飛速發展,這些直升機穩瞄系統均加裝了紅外熱像儀,形成晝夜兩用型穩瞄系統。
第三代穩瞄系統主要在20世紀90年代后期至今,隨著紅外、激光技術與信息處理技術的飛速發展,先進國家紛紛在第二代穩瞄技術的基礎上進行更新換代,其主要特點是采用三代大面陣熱像儀、連續變倍光學系統、半導體泵浦雙模激光指示/測距儀、多目標跟蹤、信息融合等先進技術,如 AH-64D“長弓阿帕奇”攻擊直升機“箭頭”穩瞄系統、AH-1Z“蝰蛇”TSS穩瞄系統等。
RAH-66“柯曼奇”是美國研制的最新型武裝偵察直升機,盡管目前已下馬,但其裝備的EOSS穩瞄系統不僅裝有當前最高水平的各種光電傳感器,而且其總線技術、信息處理與融合、隱身、一體化穩定平合等技術都代表著直升機光電系統當前最高技術水平。
2.2 存在的不足
雖然目前直升機裝備了融合電視、紅外和激光等先進技術的穩瞄系統,可以“打得更準、看得更遠”,但制約其光電系統發揮作用的因素仍然很多。
電視系統即可見光成像系統,屬于被動成像系統,它是利用可見光探測器感知目標反射的日光進行成像。由此可見,其性能很大程度上受到環境和目標本身的影響。在霧、霾、雨、雪等惡劣天氣條件下很難發揮作用;目標本身對電視系統的影響也很大,如果目標處在黑暗或對日光反射率極低的條件下,電視系統的作用就會大大降低。
紅外成像技術主要是靠場景溫度和目標輻射率的變化來提供圖像信息,雖然能夠克服電視系統夜晚條件下不能對目標探測識別的不足,但仍屬于被動成像系統,同樣受天氣和目標的影響較大,當探測目標與環境溫度溫差很小甚至沒有溫度變化時,就不能很好地進行探測與識別,紅外系統作用的發揮就會受到極大的限制。此外,大氣對紅外線的傳輸具有窗口效應和衰減效應,紅外系統的探測距離有限。
目前,激光技術雖然已經應用到直升機穩瞄系統當中,但其作用僅限于測距和導彈指引等,還沒有將激光的成像技術進行應用。
3 GVT在直升機中的應用分析
3.1 先進性分析
距離選通激光主動成像技術具有明顯的技術優勢,在天氣條件惡劣、強介質散射等情況下,可有效避免后向散射光的干擾;可在低照度、背景復雜的條件下,獲取目標的強度像和距離像,并且還可以生成高分辨率的三維圖像。激光主動成像技術可以有效彌補電視和紅外探測技術的短板,將GVT與電視、紅外技術進行有效融合,對直升機的整體戰技術水平的提高具有重要意義。
對距離選通激光主動成像系統而言,調制對比度是激光成像系統的重要評價參數之一[3]。調制對比度Cr定義為:
式中,Etarget和Ebac分別表示探測器上接收到的激光能量和背景能量。實際工程中要求探測器靶面Cr≥0.1。
設τe=τr-Toptics,可得探測器接收到的目標反射的激光能量為:
Ep為激光發射能量;Toptics為光學系統傳遞函數;σ為目標LRCS(目標激光散射截面);Dr為光學系統口徑;Tatm為激光大氣透過率,Tatm=exp(-σextR),σext為大氣消光系數;θt為激光發散角;R為系統探測距離。
在ICCD距離選通門控時間內,探測器接收到的背景能量為:
Ez為太陽在目標處的照度Eλ和大氣層發射的背景噪聲Eb之和,取日地平均距離時,Eλ=630W/m2um,Eb=0.3×Eλ=189W/m2um,則Ez=Eλ+Eb=819W/m2um;Δλ為光學濾波片波段;Δτ為ICCD距離選通門寬度。
調制對比度限制時,可得最大作用距離[4]為:
參考實際情況,取Toptics=0.6,Δλ=50nm,Δτ=100ns,σext=0.1km-1(1.06um)/0.25km-1(0.532um),分別選取1.06um激光和0.532um激光成像系統,在系統不同發散角條件下,對系統作用距離與激光發射能量之間的關系進行了仿真,結果如圖2、圖3。

圖2 1.06um激光探測距離與能量關系曲線

圖3 0.532um激光探測距離與能量關系曲線
從仿真分析結果看,距離選通激光主動成像系統在激光發射能量達3mJ(1.06um)和40mJ(0.532um)時,作用距離可達10km。
國內外對激光主動成像技術進行了技術研究和樣機驗證。
國外對距離選通激光主動成像技術的研究進行得較早,取得了相當的進展,國外研究機構依托其雄厚的制造工藝實力,在成像器件水平上具有突出優勢。美國的INTEVAC公司致力于成像器件的研究,該公司研制的LIVAR4000系統在實驗室獲得了28km遠處激光主動成像目標圖像。英國SELEXS&AS公司研制的激光主動成像系統利用YAG激光器可對10km遠目標成明亮圖像。俄羅斯、加拿大、瑞典等國家在GVT方面的研究也取得了非常好的效果。
國內系統總體性能較國外的差距較大。國內的長春光機所、哈爾濱工業大學、浙江大學等都在進行距離選通激光主動成像技術方面的研究。裝備學院于2006年開始進行大氣條件下距離選通激光主動成像探測技術研究,進行了大量試驗,獲得了從距離5m到約20km范圍目標的成像試驗結果,距離精度達到0.1m。
而在能見度大于15km的條件下,紅外探測系統探測公里數僅在個位數量級[5]。
從仿真分析和國內外研究成果來看,距離選通激光主動成像技術具有一定的技術優勢,達到了一定的實用條件。
3.2 可行性分析
一般的穩瞄系統由穩瞄轉塔、電子控制單元、操縱部件以及數據處理顯示單元等構成,如圖4所示。轉塔內裝有電視觀瞄具、熱像觀瞄具、激光指示器/測距機等傳感器,電子控制單元是信息處理和控制中心,用于接收數字、模擬、視頻信息,輸出系統狀態信息、控制命令和視頻圖像,實現穩瞄系統的各項功能。

圖4 光電穩瞄系統一般結構
將距離選通激光主動成像技術應用于直升機,對現有穩瞄系統進行技術改進,即只要對現有穩瞄轉塔中的激光測距機部分進行改進即可,將激光測距機的激光探測器更換為帶選通門的ICCD探測器,電子控制單元加入時序控制等,后續對圖像顯示處理單元進行相應改進。
高功率小型化激光器是距離選通激光主動成像技術應用于直升機穩瞄系統的關鍵器件,目前國內外對高功率小型化激光器的研究進入了全新的階段。2005年,美國IPG公司推出了17kw級高功率光纖激光器[6]。雖然國內高功率激光器發展水平還低于國外,但近年來也取得了很大的進步。西安應用光學研究所[7]研究的高功率LD陣列泵浦的小型化激光器平均單脈沖能量為96mJ(脈沖能量波動小于6%),脈寬為10ns。激光發射功率的不足,可以用提高接受光學系統口徑和降低激光發散角的辦法加以彌補;探測器件ICCD,國外的技術水平比較成熟,軍用ICCD早已達到三代水平(分辨率在60lm/mm以上),國內水平較低,分辨率水平停留在640×480左右的水平[8],基本能夠滿足應用的需求,但仍需花大精力進行研究和突破。發射和接收光學系統以及時序控制電路可根據系統的性能要求進行開發設計。從以上分析可見,距離選通激光主動成像技術在直升機中的應用具有一定的可行性。
3.3 發展前景
激光主動成像技術應用于直升機穩瞄系統,可有效彌補電視、紅外系統的不足,同時兼具激光測距和激光照射功能,在現有穩瞄技術上進行改進就可以實現。未來激光照明成像技術還有很大的發展空間:1)成像器件和激光器進一步升級,從而促進系統的小型化和可靠性提升,更加有利于直升機的應用;2)進行多光束、多波長激光照明成像技術研究,利用目標對不同波長激光反射率的差異,抑制散斑效應的影響,提高成像分辨率;3)進行偏振激光照明成像探測技術研究,提高特定目標、隱蔽目標探測識別能力;4)進一步提高數據處理速度和精度。這些技術的發展和突破,對激光主動成像技術在直升機中的應用都有很大的促進作用。
4 總結
本文介紹了距離選通激光主動成像技術工作原理和系統組成,介紹了直升機穩瞄系統的現狀和局限性,分析了距離選通激光主動成像技術應用于直升機的可行性和先進性。系統地開發和研制需要進一步深入研究。隨著激光主動成像技術的發展,距離選通激光主動成像技術必將成為直升機穩瞄系統發展的趨勢。
[1] 郭惠超,孫華燕,范有成.大氣條件下距離選通激光主動成像技術發展現狀[J].激光與光電子學進展,2013(8):1-2.
[2] 紀 明,許培忠,徐飛飛. 武裝直升機光電系統發展與對策[J].應用光學,2010(1):2.
[3] 戴得德,等.激光主動成像系統目標圖像質量評價參數研究[J]. 激光與紅外,2009(9):989.
[4] 李迎春,唐黎明,孫華燕. 空間目標的激光主動成像系統性能分析[J].裝備指揮技術學院學報,2008(2):68.
[5] 中國直升機設計研究所,編.X型機使用手冊[Z]. 中國直升機設計研究所,2010.
[6] 張勁松.高功率光纖激光器發展概況[J].光通信技術,2009(12).
[7] 張 彪,高 瑋,楊照金,等.高功率LD陣列泵浦激光器小型化研究[J],應用光學,2009(4).
[8] 高性能數字式ICCD制作與性能分析[D].北京:北京理工大學,2014(2):5.
Analysis on the Application of Range-Gated Laser Active Imaging Technology in Helicopter
ZHAO Yun1, YAO Youwen1, ZHANG Bin2
(1.The PLA General staff’s Army Aviation Military Office in Jingdezhen Region, Jingdezhen 333001, China;2.Unit 61213 PLA, Linfen 041000, China)
In order to improve the operational performance of a helicopter as the starting point, Range-Gated laser active imaging technology and stabilization technology were reviewed. And also analyzed the feasibility and advanced of the application of Range-Gated laser active imaging technology in the helicopter stabilization. Range-Gated laser active imaging technology was an important approach to improve the performance of a helicopter and the development direction of stabilized sighting system.
helicopter; Range-Gated; laser imaging
2015-04-20
趙 云(1984-),男,安徽南陵人,碩士,工程師,主要研究方向:航空電子。
1673-1220(2015)04-020-04
V243
A
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
