嫦娥三號巡視器及其技術特點分析
2015-02-27 08:21:06申振榮張伍賈陽孫澤洲
航天器工程 2015年5期
關鍵詞:設計
申振榮 張伍 賈陽 孫澤洲
(北京空間飛行器總體設計部,北京 100094)
嫦娥三號巡視器及其技術特點分析
申振榮 張伍 賈陽 孫澤洲
(北京空間飛行器總體設計部,北京 100094)
嫦娥三號巡視器是我國月球探測二期工程探測器系統的重要組成部分,實現了我國首次地外天體表面巡視勘察。文章介紹了嫦娥三號巡視器的系統組成、構型及分系統方案要點;分析了月面移動、自主導航與遙操作控制、月面生存、地面試驗模擬和系統資源約束等5個方面的技術特點和難點;給出了移動裝置和車輪參數優化設計,天地協同操作控制,大溫變熱設計和自主光照喚醒,月塵和低重力等月面特殊環境模擬,系統集成與設計優化等工程解決措施。
嫦娥三號巡視器;系統設計;技術特點;工程措施
1 引言
2013年12月15日23時47分,嫦娥三號巡視器與著陸器在月面成功進行互相拍攝,嫦娥三號任務取得圓滿成功,標志著我國探月工程第二步戰略目標的全面實現。巡視器是嫦娥三號探測器系統的重要組成部分,是能夠適應月球環境、攜帶科學探測儀器在月面進行多點就位探測的新型航天器。
從20世紀80年代開始,我國科研院所、高等院校紛紛開展巡視器相關技術的研究工作,展示了多種模型和原理樣機。中國空間技術研究院于2004年聯合國內相關技術優勢單位,共同開展了巡視器方案論證與原理樣機研制工作。通過3年多的工作,研制了國內第一輛月面巡視器原理樣機,建成了國內最大規模的巡視器綜合試驗場,并利用原理樣機完成了國內首次沙漠外場試驗,為巡視器的工程研制奠定了基礎。2008年,探月二期工程嫦娥三號進入工程研制,并最終研制出了適于月面工作的小型化、低耗能、高集成和高智能的玉兔號巡視器。
在嫦娥三號任務取得成功后,文獻[1]和[2]從嫦娥三號探測器系統的角度對所取得的技術成就與創新、地面試驗方法與試驗技術等進行了總結。本文將嫦娥三號巡視器作為完整的系統,在介紹其系統方案的基礎上,分析了月面移動、自主導航與操作控制、月面生存、地面試驗模擬、系統資源約束等5個方面的技術特點,并提供了工程研制中的具體解決措施,可為后續行星表面巡視探測任務設計提供參考。
2 系統方案
嫦娥三號巡視器用于月面自動巡視勘察,因此要具備地形地貌識別、姿態確定、移動里程確定、自主避障及月夜生存等能力,并能夠實現攜帶科學探測儀器在月面一定區域內運動,實現月面形貌與地質構造調查、月面物質成分和資源勘察、月面淺層內部結構探測等科學探測任務。
2.1 巡視器系統組成及構型
嫦娥三號巡視器包括移動、結構與機構、制導導航與控制(GNC)、綜合電子、電源、熱控、測控數傳和有效載荷共8個分系統。巡視器的構型如圖1所示,采用箱板式結構,大部分儀器設備安裝在艙內的頂板上,移動裝置差動機構、鋰離子蓄電池組等設備安裝在艙內的底板上;左右兩塊側板可以拆卸,為艙內設備安裝提供通道和操作空間。
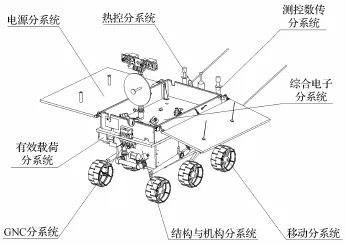
圖1 嫦娥三號巡視器總體構型Fig.1 System configuration of Chang'e-3 lunar rover
2.2 分系統方案
(1)移動分系統。在對履帶式、腿式和輪式等移動類型進行分析比較后,結合系統資源代價、發射狀態包絡尺寸等任務約束條件,并參考國外巡視器的發展狀況與趨勢,確定采用輪式方案。綜合比較懸架的地形適應能力、月壤適應能力、車輪負載均衡性、承載能力、質量特性、結構復雜程度及技術成熟度等因素,選用主副搖臂懸架方案。移動分系統由車輪、搖臂和差動裝置等組成,具備在月面前進、后退、轉向(原地轉向和行進間轉向)、爬坡和越障能力。6個車輪采用獨立驅動方式,并利用4個角輪實現轉向,懸架分布在結構本體兩側,通過差動裝置與結構本體相連,使所有的車輪均與地面保持接觸。
(2)結構與機構分系統。它由結構和機構兩部分組成。綜合考慮結構剛度和強度,針對輕小型化設計需求,采用箱板式主承力結構方案,主承力結構由頂板、前后艙板、底板等組成,承受任務過程中遇到的各種載荷。機構包括太陽翼機械部分、桅桿和機械臂。為減少系統質量資源消耗,太陽翼機械部分的右太陽翼采用單自由度步進電機驅動實現對日定向轉動,左太陽翼采用彈性組件展開并鎖定的方案;同時,采用機構功能復用的系統設計思路,將相機和定向天線的指向機構綜合集成于桅桿上,設計三自由度驅動的桅桿,可分時實現天線對地定向以及相機對周圍360°范圍成像;機械臂設計采用最小配置的三自由度關節型串聯方案,使所承載的科學儀器能更接近所關注的月面探測目標。
(3)GNC分系統。它包括主動像素傳感器(APS)太陽敏感器、慣性測量單元、導航相機、避障相機、激光點陣器,通過集成于綜合電子分系統的軟硬件實現環境感知、位姿和速度確定、路徑規劃、緊急避障、運動控制與安全監測等功能。采用全新的動靜結合月面導航定姿、多輪協調運動的軌跡與航向跟蹤控制方案,突破了地形可通過性量化分析的路徑規劃技術,單/雙目被動視覺的主動結構光三維信息獲取技術,以及點陣式離散三維信息的障礙識別技術,基于雙目立體視覺系統實現了月面障礙探測和自主避障規劃。
(4)綜合電子分系統。它采用集中式一體化的體系結構,采用實時操作系統,內部利用CAN總線通信,對外利用LVDS、RS422接口形式實現信息交互,由一臺電子設備實現遙測、遙控、程控、數據管理、導航與控制、機構驅動控制、火工品控制、供配電管理等功能集成。
(5)電源分系統。它由三結砷化鎵太陽電池陣、鋰離子蓄電池組、電源控制器組成。為節省系統質量開支并簡化電源控制器設計,采取半調節母線方案,即在太陽電池陣供電時對母線電壓進行全調節,在蓄電池組獨立供電時不作調節,而直接輸出到母線。為確保安全可靠地度過月夜,設計晝夜轉換和夜晝轉換策略,研制具有自關斷和自接通功能的休眠喚醒電路,實現了晝夜轉換過程中整器可靠自斷電,實現了夜晝轉換過程中自主觸發接通供電回路從而自動喚醒,具體設計見文獻[3]。
(6)熱控分系統。它由兩相流體回路、低溫多層隔熱組件、玻璃型二次表面鏡(OSR)散熱面、熱控白漆、電加熱器、熱敏電阻、同位素熱源(RHU)等組成。采用散熱面對天并將大部分儀器設備直接安裝在散熱面上的方案,節省了熱控用于熱量收集、傳輸所需付出的資源,解決了有限資源下的月晝高溫環境熱控散熱問題;設計了太陽翼覆蓋散熱面并利用兩相流體回路將同位素熱源的熱能導入艙內的方案,解決了月夜極低溫環境和整器斷電無自發熱情況下的熱控保溫問題。
(7)測控數傳分系統。由X頻段全向接收天線、X頻段應答機、X頻段固態放大器、X頻段全向發射天線、X頻段定向天線、UHF頻段全向發射天線、UHF頻段發射機及電纜組等組成。在巡視器加電工作后,X頻段全向接收天線、X頻段應答機與地面建立X頻段上行遙控;X頻段應答機、X頻段固態放大器、X頻段全向發射天線與地面建立X頻段下行遙測;X頻段應答機、X頻段固態放大器、X頻段定向天線與地面建立下行數傳通道。此外,設計了UHF頻段發射機、UHF頻段全向發射天線與著陸器建立UHF頻段器間通信通道,作為巡視器月面工作時下行遙測和數傳鏈路的異構備份,進一步提高下行鏈路的可靠性。
(8)有效載荷分系統。為實現科學探測任務,配置了全景相機、測月雷達、紅外成像光譜儀、粒子激發X射線譜儀及有效載荷電控箱,有效載荷及其功能見表1。

表1 有效載荷及其功能Table 1 Payloads and their functions
3 技術特點分析
巡視器作為我國首次研制的地外天體表面移動的新型航天器,相對于以往的地球軌道航天器有很大不同,面臨活動機構較多、工作環境(主要是月面環境)嚴酷、天地交互頻繁、系統資源約束嚴苛等技術難點,須采取系統優化設計、技術攻關以及地面充分試驗等措施,解決月面移動、自主導航與操作控制、月面生存、地面試驗模擬和系統資源約束等技術難題,確保巡視器在月面非結構化復雜環境(即沒有人工道路及標志的自然環境)中安全行駛并到達指定位置。
3.1 月面移動技術
巡視器工作在松軟月壤和分布著大小不等的月坑、月巖的非結構化環境,要求移動系統具備較高的通過性和爬坡越障能力。
(1)移動裝置參數優化設計。在分析月坑、月巖幾何參數及其月面統計分布規律的基礎上,確定了移動系統最大運動速度200 m/h、爬坡角度30°和越障高度200 mm等總體性能指標。通過構型布局優化設計,合理布置巡視器本體質心位置和離地間隙,確保了各輪承載的均勻性和系統的幾何通過性;通過系統運動學和多體動力學仿真,對系統的支撐通過性、幾何通過性、機動性、穩定性進行了綜合性能量化評估,確定了搖臂懸架和車輪的幾何尺寸、離地間隙、轉彎半徑等重要參數。
(2)車輪構型優化設計。車輪的輪面弧度和寬度、篩網孔和棘爪的幾何尺寸及分布等,決定了接地比壓、牽引系數、附著系數等重要參數,并直接影響到系統的動力性和越障性能的優劣。通過單輪輪壤作用臺架試驗,測試不同構型車輪在不同速度、不同載荷下的性能,并在此基礎上對輪壤動力學模型進行修正,實現了對工程使用的彈性篩網輪的參數優化。
在第1個月晝,嫦娥三號巡視器先后完成了兩器釋放分離、兩器互相拍攝、功能性能測試等工作,驗證了整器在實際月壤上的通過性及月面移動性能。嫦娥三號巡視器第1個月晝和第2個月晝在月面累計移動了118.9 m,月面行駛路線如圖2所示(圖中的坐標原點為著陸器在月面的位置)。
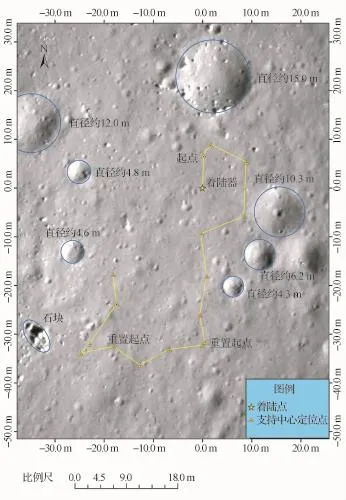
圖2 嫦娥三號巡視器月面行駛路線Fig.2 Route of Chang'e-3 lunar rover
3.2 自主導航與遙操作控制技術
巡視器在月面未知復雜環境中工作,要具備自主能力和天地協同工作能力[4]。如何實現月面環境感知、障礙識別、局部路徑規劃及多輪運動協調控制,是自主導航控制必須要解決的難題。另外,巡視器月面運行過程是器地交互、地面持續支持的過程,巡視器在月面移動采取何種操作模式,如何設計研制滿足巡視任務的地面任務支持與遙操作系統是必須要解決的難題。
(1)自主導航與運動協調控制。巡視器GNC分系統采用立體視覺技術實現月面未知環境感知,即利用相機圖像獲得周圍地形的幾何信息,通過對局部地形進行評價建立環境模型,以局部地形適宜度圖的形式表示。在該適宜度圖上對已設定的多條備選弧徑進行評價,選取綜合評價值最高的路徑作為下一步的安全路徑。考慮到巡視器的運動速度較低,以及器上計算資源的約束,巡視器的輪系協調控制主要采用運動學模型,并通過動力學仿真對輪系協調控制律進行離線驗證。輪系運動協調控制包括整器速度與航向角控制、驅動輪速度與轉向輪轉向速度協調控制兩層。通過整器和輪系兩層控制,實現原地轉彎、沿固定曲率運動(包括直線)和沿路徑點到達目標點3類運動要求,每個控制周期給出各驅動輪轉速、各轉向輪轉向速度的期望值,作為電機底層控制的輸入。在研制過程中,通過相機標定試驗、導航光學設備的視覺專項試驗、GNC分系統的物理仿真試驗、內場試驗等,對自主導航控制性能進行了驗證;巡視器月面工作期間,對基于雙目立體視覺的環境感知和障礙識別、軌跡與航向跟蹤控制等功能性能進行測試,驗證了視覺探測避障算法、月面定姿策略和驅動轉向協調控制算法的正確性,實現了巡視器月面自主導航與運動協調控制。
(2)地面任務支持與遙操作控制。綜合分析國外相關技術發展趨勢和國內技術現狀,設計了地面遙操作控制與巡視器自主相結合的天地一體化運行控制方案。地面任務支持與遙操作控制系統主要由三維地形建立、任務整體規劃和探測周期規劃等功能模塊組成,開發了基于特征點匹配、極線校正、立體匹配、三維重建等算法[5],實現了二維全景圖像和三維地形圖恢復和建立;開發了環境(光照、地形、星歷等)模塊、整器運動學模塊、多約束優化算法等,實現了行為序列和行進路徑等任務規劃;開發了基于地形圖的通過性分析和啟發式路徑規劃算法(Field D*),實現了路徑點序列生成和控制策略制定等全局規劃。巡視器在月面工作時,地面任務支持與遙操作控制系統充分發揮了地面系統較強的處理能力和人機結合的優勢,完成了月面環境三維恢復與重建、多約束三層次(任務規劃、周期規劃、導航規劃)規劃、多自由度機械臂就位探測規劃、實時移動里程繪制等任務。
3.3 月面生存技術
巡視器在月面工作,必須解決月晝高溫的熱排散問題,以及月夜長達14天沒有太陽能可利用條件下的保溫問題,并在月晝/月夜轉換中實現可靠的休眠和喚醒。
(1)大溫變環境下的熱控設計。月面可視為一溫度分布不均勻的灰體面,其局部表面溫度主要受當地接收的太陽輻射加熱情況及月壤的熱物性參數的影響。由于沒有類似地球大氣層的保溫和傳熱,月面晝夜溫差非常大,月晝溫度可達+120℃,在太陽不能照射到的陰影區及月夜期間,月面溫度可降至約―180℃。在提高巡視器艙內儀器設備的高溫、低溫適應能力的同時,針對月晝高溫環境,采取以下措施:①根據月晝期間月面紅外輻射熱流與太陽輻射熱流量級相當的特點,將巡視器對天面選取為散熱面;②艙內電子設備集中布置在散熱面上,減少熱控導熱環節,以利于月晝集中散熱;③通過采用分時工作的方式,減少月晝期間艙內電子設備工作產生的熱耗,以應對月午期間的高溫環境。針對月夜長時間的極低溫環境,采取以下措施:①盡量將電子設備布置在艙內,并通過隔熱設計減少艙內漏熱;②設計集發電和熱控為一體的多功能太陽翼,通過太陽翼收攏覆蓋散熱面來達到切斷艙內與外部環境熱交換的目的;③設計兩相流體回路方案,將布置在艙外的同位素熱源產生的熱量導入艙內,實現月夜期間艙內溫度保持。
(2)高可靠休眠喚醒設計。安全、可靠地實現月晝/月夜轉換,對月面長期工作至關重要。綜合考慮巡視器及地面測控能力等約束條件,設計了自主全斷電的晝夜轉換休眠方案和光照自主加電的夜晝轉換喚醒方案,研制高可靠光照喚醒電路。在晝夜轉換時,首先完成休眠狀態設置,最終利用延時指令自主完成整器斷電,巡視器進入全斷電休眠狀態;在夜晝轉換時,利用太陽翼發電輸出的光照觸發信號自主接通整器供電,電子系統得電工作并與地面建立測控通道,隨后在地面控制下完成喚醒狀態設置,巡視器恢復工作狀態。
在第1個月晝和第2個月晝月面工作期間,嫦娥三號巡視器的溫度水平良好,各設備溫度均處于預定范圍內并有足夠的余量,驗證了巡視器針對月晝高溫熱設計的正確性,以及對月面高溫環境的適應性。在第2個月晝,巡視器順利實現自主喚醒,根據傳回地面的遙測參數判斷器上各設備經歷月夜后均正常,驗證了過月夜策略的正確性,以及巡視器對月夜低溫環境的適應性。總之,嫦娥三號巡視器通過了實際月面環境的考核,具備了月面生存的能力。
3.4 地面試驗模擬
月球的月塵、重力、溫度等與地球軌道的環境不同,因此要研究相關的試驗方法和理論,配備相應的試驗驗證和仿真模擬設備,才能確保地面驗證的有效性。
月塵可能會對巡視器的光學敏感器、太陽電池、相機鏡頭、熱控涂層等表面造成污染影響,造成光透過率下降、熱控性能降低等。此外,細小的月塵還可能侵蝕沒有完全密閉的軸承、齒輪和其他機械裝置,造成機械元件磨損,為此進行了部、組件月塵摸底試驗,驗證了防塵設計措施的有效性。低重力主要對活動機構和兩相流體回路有較大影響,研制過程中采用配重卸載模擬1/6gn的重力環境,進行機構展開試驗、移動性能試驗;采用數值分析法,進行低重力條件下的流體回路性能分析,并在試驗過程中通過調整流體回路儲液器高度來達到等效模擬低重力的目的。針對月面大溫差環境,完成艙外機構和天線等設備的低溫存儲試驗、熱控材料環境適應性試驗、潤滑油脂月面環境適應性評估試驗等,并在整器條件下完成巡視器月面工作高溫和低溫等多種工況的熱平衡試驗,驗證了熱設計的正確性和設備對溫度環境適應性。
在研制過程中,根據巡視器系統高度集成、工作模式復雜、活動部件多、月面工作環境惡劣的特點,在航天器研制常規試驗(電性能綜合測試、噪聲和振動試驗、熱平衡和熱真空試驗等)的基礎上,制定了完備的產品環境試驗矩陣及整器室內和外場試驗[6]、組合面移動性能試驗等地面專項試驗驗證方案,研制了工程試驗用模擬月壤[7]、月塵模擬裝置、二維隨動恒拉力低重力裝置、超低溫罐及內場等試驗設施[8],實現了巡視器地面驗證的充分性、有效性。
3.5 系統資源約束
巡視器要在總質量及包絡空間等系統資源的嚴苛約束下,滿足功能性能和可靠性安全性要求,因此如何減小整器質量,進行輕小型化設計是必須要解決的難題。
通過三維模裝和協同設計技術,確定滿足高容積比、高載荷比、小配重要求的巡視器構型和布局方案;通過多學科集成優化、電子系統集成、機構功能復用,實現了巡視器的輕小型化和總體最優[9]。采取的主要措施包括:
(1)在系統層面,采用電子集成、機構復用和輕量化設計。主要包括:電子功能系統集成、一體化設計;設備(相機)安裝支架與設備一體化設計;太陽翼功能復用設計,即在月晝時,利用鋪設在基板上的太陽電池片輸出電能,在月夜時,基板覆蓋在散熱面上,通過其對天面上包覆的絕熱材料起到保溫效果;相機、定向天線安裝在桅桿上,共用一套機構;選用輕質小型電連接器;艙外設備引線穿艙后直接與艙內設備連接,以減少電連接器。
(2)在單機/分系統層面,進行優化設計,使用輕質材料。結構與機構分系統預埋件、驅動機構殼體等采用鎂合金,選用輕小型軸承、電機和諧波減速器,桅桿與太陽翼共用一套壓緊釋放裝置;電源分系統鋰離子蓄電池組采用更高比能量的正極活性材料、更輕的外殼材料;GNC分系統選用輕小型一體化設計部件。
通過以上措施,巡視器實現艙內設備56%的高容積率和13%的載荷比,并最大程度地規避了質量超標的風險,滿足了系統資源約束。
4 結束語
嫦娥三號巡視器實現了我國首次在地外天體表面巡視勘察的目標,開展的月球淺層結構剖面探測屬國際首次,突破了月面移動、自主導航與遙操作控制、月面生存等關鍵技術,取得了新型航天器總體設計、輕小型機構、雙目立體視覺導航、任務規劃與遙操作控制、重力輔助兩相流體回路、自主休眠光照喚醒等一批具有自主知識產權的創新科研成果,為后續月球和火星巡視探測任務奠定了良好的技術基礎,也為未來深空探測任務積累了豐富的經驗。
(References)
[1]Sun Zezhou,Jia Yang,Zhang He,et al.Technological advancement and promotion roles of Chang'e-3 lunar probe mission[J].Science China:Technology Science,2013,56(11):2702-2708
[2]孫澤洲,張熇,賈陽,等.嫦娥三號探測器地面驗證技術[J].中國科學技術科學,2014,44(4):369-376 Sun Zezhou,Zhang He,Jia Yang,et al.Ground validation technologies of the Chang'e-3 lunar spacecraft[J]. Science China Technological Sciences,2014,44(4):369-376(in Chinese)
[3]雷英俊,張明,金波,等.月面探測器月夜休眠自主喚醒方法[J].航天器工程,2014,23(6):13-16 Lei Yingjun,Zhang Ming,Jin Bo,et al.Research on autonomous sleep-reboot of lunar probe[J].Spacecraft Engineering,2014,23(6):13-16(in Chinese)
[4]賈陽,張建利,李群智,等.嫦娥三號巡視器遙操作系統設計與實現[J].中國科學技術科學,2014,44(5):470-482 Jia Yang,Zhang Jianli,Li Qunzhi,et al.Design and realization for teleoperation system of the Chang'e-3 rover[J].Science China Technological Sciences,2014,44(5):470-482(in Chinese)
[5]魏士儼,申振榮,張爍,等.月球車圖像超分辨率重建算法[J].武漢大學學報(信息科學版),2013,38(4):436-439 Wei Shiyan,Shen Zhenrong,Zhang Shuo,et al.Moon rover image super-resolution reconstruction algorithm[J].Geomatics and Information Science of Wuhan University,2013,38(4):436-439(in Chinese)
[6]賈陽,王瓊,王芳,等.月面巡視探測器外場試驗方法[J].航天器環境工程,2012,29(6):602-607 Jia Yang,Wang Qiong,Wang Fang,et al.Research on the methods of lunar rover field test[J].Spacecraft Environment Engineering,2012,29(6):602-607(in Chinese)
[7]賈陽,申振榮,黨兆龍,等.模擬月壤研究及其在月球探測工程中的應用[J].航天器環境工程,2014,31(3):241-247 Jia Yang,Shen Zhenrong,Dang Zhaolong,et al.Lunar soil simulant and its engineering application in lunar exploration program[J].Spacecraft Environment Engineering,2014,31(3):241-247(in Chinese)
[8]賈陽,申振榮,龐彧,等.月面巡視探測器地面試驗方法及技術綜述[J].航天器環境工程,2014,31(5):464-469 Jia Yang,Shen Zhenrong,Pang Yu,et al.A review of test method and technologies for lunar rover[J].Spacecraft Environment Engineering,2014,31(5):464-469(in Chinese)
[9]張旺軍,申振榮,李群智,等.月球巡視器的系統設計優化方法研究[J].航天器工程,2014,23(3):4-11 Zhang Wangjun,Shen Zhenrong,Li Qunzhi,et al. Study on system design and optimization method of lunar rover[J].Spacecraft Engineering,2014,23(3):4-11(in Chinese)
(編輯:夏光)
System Design and Technical Characteristics Analysis of Chang'e-3 Lunar Rover
SHEN Zhenrong ZHANG Wu JIA Yang SUN Zezhou
(Beijing Institute of Spacecraft System Engineering,Beijing 100094,China)
Chang'e-3 lunar rover is the key of spacecraft system in the phaseⅡof China lunar exploration program.This paper introduces the system composition,configuration and primary subsystem of lunar rover firstly.Secondly the technical characteristics and difficulties are analyzed in five aspects,namely locomotion on the moon,self-navigation&teleoperation control,surviving on the moon,ground validation technologies,restricted system resources.Lastly the engineering solving measures are represented including parameter optimization of the locomotion and wheels,coordinated control between at the moon and from the earth,thermo-design on largescale change of temperature,autonomous reboot by sunlight,simulation of special environment of the moon such as dust and low-gravity,system integration and optimum design.
Chang'e-3 lunar rover;system design;technical characteristic;engineering measure
V476.3
:ADOI:10.3969/j.issn.1673-8748.2015.05.002
2014-12-04;
:2015-06-28
國家重大科技專項工程
申振榮,男,碩士,高級工程師,從事深空探測器總體設計和研制工作。Email:zrshen@sina.com。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04