利用GNSS星間鏈路的航天器定軌方法研究
2015-02-27 08:21:22孟軼男樊士偉楊強文宋小勇
航天器工程 2015年5期
關鍵詞:用戶
孟軼男樊士偉楊強文宋小勇
(1北京跟蹤與通信技術研究所,北京 100094)(2西安測繪研究所,西安 710054)
利用GNSS星間鏈路的航天器定軌方法研究
孟軼男1樊士偉1楊強文1宋小勇2
(1北京跟蹤與通信技術研究所,北京 100094)(2西安測繪研究所,西安 710054)
針對利用全球衛星導航系統(GNSS)星間鏈路實現用戶航天器定軌時存在的鏈路資源有限問題,構建基于GNSS星間鏈路的用戶航天器定軌模型,設計了應用流程,重點研究了星間鏈路測量頻度、可建立鏈路數量等鏈路規劃模式對用戶航天器定軌結果的影響,并分別針對高軌用戶航天器和中低軌用戶航天器進行仿真分析和試驗驗證。結果表明:用戶航天器與GNSS衛星建立星間鏈路的頻度越高、數目越多,動力學法軌道改進的效果越好;對高軌用戶航天器采用廣播星歷,即使每6 h只有1條觀測鏈路,也可以獲得40 m以內的定軌精度;對低軌用戶航天器采用精密星歷,當每次觀測鏈路增加到5條時,基本可以獲得1 m以內的定軌精度。
全球衛星導航系統;星間鏈路;定軌;鏈路規劃;應用模式
1 引言
全球衛星導航系統(GNSS)星間鏈路是指導航衛星之間直接建立的用于雙向測距及數據傳輸的無線電鏈路。為了實現GNSS自主運行,提升系統服務性能,滿足完好性指標,在GPS、GLONASS、Galileo及我國的“北斗”等導航系統中,建有星間鏈路系統或在持續關注星間鏈路系統的設計,不過,目前大部分星間鏈路研究主要側重于導航系統內部的應用[1-4]。GNSS星間鏈路的波束范圍可覆蓋地面、近地空間和深空[5-6],兼具高精度測量和星間通信功能,可為導航系統之外的用戶航天器定軌提供一種新的有效手段[7]。傳統導航衛星播發L頻段導航信號,其有效波束覆蓋范圍僅針對地面和地球附近用戶進行優化設計,因此GNSS導航信號只能用于低軌航天器的定軌。將該信號用于中高軌用戶航天器定軌時,由于天線波束角限制,面臨可視導航衛星數目少、定軌精度差等問題,而高頻段和寬掃描范圍的星間鏈路,能夠有效克服這些問題。文獻[7]中主要對利用GNSS實現用戶航天器定軌的可行性進行了初步分析,對具體的應用方式和策略并沒有相關文獻報道。
GNSS星間鏈路有廣播型和指向型兩類,指向型是未來導航系統的發展趨勢。對于指向波束GNSS星間鏈路而言,由于可用于用戶航天器的星間鏈路資源有限,要同時保證導航星座和中高軌用戶航天器的需求,系統需要根據用戶航天器概略軌道及定軌要求進行鏈路規劃,使用戶航天器能夠接收到星間鏈路測距信號。本文主要針對不同星間鏈路規劃、調度模式下的用戶航天器定軌精度進行仿真分析,可為后續利用GNSS星間鏈路實現用戶航天器定軌提供參考。
2 數學模型
由于GNSS的L頻段信號主要服務于距地面高度1000 km以下的用戶航天器,本文重點探討利用GNSS星間鏈路對傳統L頻段所不能覆蓋的中高軌用戶航天器進行定軌的應用模式,主要包括用戶航天器建立鏈路方式及定軌策略研究。
2.1 定軌原理
對于用戶航天器,可根據其概略軌道位置進行鏈路規劃,調度數顆幾何可視的GNSS衛星,使其星間鏈路波束指向用戶航天器位置來執行測定軌任務。當用戶航天器獲得一定的觀測量時,可利用動力學法定軌,即根據獲取的GNSS星間鏈路觀測數據,采用卡爾曼(Kalman)濾波方法結合航天器動力學模型對運動狀態參數進行最優估計。
2.2 測量模型
2.2.1 測量拓撲
1)高軌用戶航天器建立鏈路方式
對軌道高于GNSS星座的高軌用戶航天器來說,其所能接收到的導航衛星星間鏈路信號是從其下方地球對面的中高軌GNSS衛星發出的,須滿足導航衛星星間鏈路的離軸角α大于地球遮擋角φ,并且小于星間鏈路天線的最大波束掃描范圍Φ,即

地球遮擋角φ對GNSS的MEO導航衛星和GEO導航衛星來說,分別為15°和10°,星間鏈路天線最大掃描范圍Φ為70°。圖1以GEO用戶航天器為例,說明高軌用戶航天器與GNSS可視衛星的建立鏈路范圍。
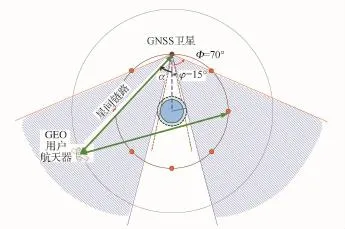
圖1 GEO用戶航天器與GNSS衛星建立鏈路示意Fig.1 Crosslink between GNSS satellite and GEO user spacecraft
考慮到現有GNSS衛星星間鏈路天線主要采用對地安裝模式,因此本文假設高軌用戶航天器星間鏈路接收天線同樣采用對地安裝模式,即滿足式(1)條件的導航衛星可與高軌用戶航天器建立星間鏈路。
2)中低軌用戶航天器建立鏈路方式
對軌道高度低于GNSS星座的中低軌用戶航天器而言,其接收天線在航天器本體上的安裝可采用上置或下置方式,為減少導航衛星與用戶航天器之間的絕對距離和地球遮擋,常采用天線上置安裝方式,此時,其所能接收到的導航衛星星間鏈路信號是從其上方的中高軌GNSS衛星發出的,須滿足導航衛星星間鏈路的離軸角α小于最大波束掃描范圍Φ,并且用戶航天器的觀測仰角θ大于閾值η,即

式中:星間鏈路最大掃描范圍Φ為70°;用戶仰角閾值η為5°;β為星間鏈路與用戶徑向(用戶航天器與地心連線)的夾角。
圖2說明了LEO用戶航天器與GNSS可視衛星的建立鏈路范圍。

圖2 LEO用戶航天器與GNSS衛星建立鏈路示意Fig.2 Crosslink between GNSS satellite and LEO user spacecraft
在中低軌用戶航天器天線采用上置安裝方式時,式(2)的第1個條件自然滿足,只要對第2個條件進行判斷,滿足該條件的導航衛星即可與中低軌用戶航天器建立星間測量鏈路。
2.2.2 觀測模型
當星間鏈路采用雙向偽碼測距體制時,與地面定位用戶的偽距測量模型類似,GNSS星間鏈路偽距觀測量由測量到達時間差(TOA)獲得。

式中:ρr和ρt分別為用戶航天器接收和發射星間鏈路信號時的GNSS星間鏈路偽距觀測量;c為光速;tu,r和tu,t分別為用戶航天器接收和發射星間鏈路測距信號時的鐘面時;tSt和tSr分別為GNSS衛星發射和接收星間鏈路測距信號時的鐘面時。
考慮觀測量中的GNSS星歷誤差、衛星鐘差、電離層延遲(高軌用戶航天器可忽略)、相對論效應、天線相位中心誤差和星間鏈路收發設備時延等各項誤差,并進行修正,則GNSS星間鏈路偽距觀測方程可以表示為
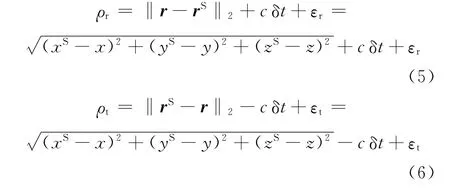
式中:用戶航天器和導航衛星的三維位置分別為r=[x y z]T和rS=[xSySzS]T;||(*)||2表示矩陣的2-范數;δt為用戶航天器鐘差;εr和εt分別表示用戶航天器接收和發射星間鏈路信號時經過偽距觀測模型修正后的殘余測量誤差。
實際上,用戶航天器接收和發射星間鏈路信號的時刻不同,但可以忽略這一收發時間間隔,對雙向測量進行測量時間歸化處理,將式(5)和式(6)相加,即可基本消除用戶航天器鐘差影響,從而得到僅含導航衛星位置參數的觀測方程,利用該方程可對用戶航天器位置進行求解。

由于星間鏈路收發間隔時間很短,因此時間歸化的誤差對定軌結果的影響很小。
2.3 定軌模型及參數解算
采用動力學法進行定軌解算,以用戶航天器位置、速度和動力學參數作為狀態向量,對航天器運動動力學方程進行線性化近似后,可得到其動力學狀態向量轉移方程為

式中:xk為tk歷元的用戶航天器三維位置、速度、光壓參數等動力學狀態參數的改正量;Φk,k―1為一步狀態轉移矩陣;wk為動力學噪聲,其協方差矩陣為Σwk。
以參考軌道為初值,將觀測方程式(7)線性化,觀測誤差方程可簡化表示為

式中:Lk為tk歷元的星間鏈路偽距觀測量;Hk為觀測矩陣,見式(10);εk為觀測噪聲,其協方差矩陣為Σk。

定軌時采用卡爾曼濾波算法如下。
1)狀態預測

2)測量更新

式中:Kk為濾波器增益系數;為最優估值的協方差矩陣;I為單位矩陣。
如果給定用戶航天器概略軌道參數參考值X*(t)、先驗待估參數和先驗協方差矩陣,即可利用上述方法求得tk時刻的最優估計值,從而得到改進后的軌道。

2.4 定軌流程及影響因素分析
利用GNSS星間鏈路實現用戶航天器定軌的大致流程,如圖3所示。
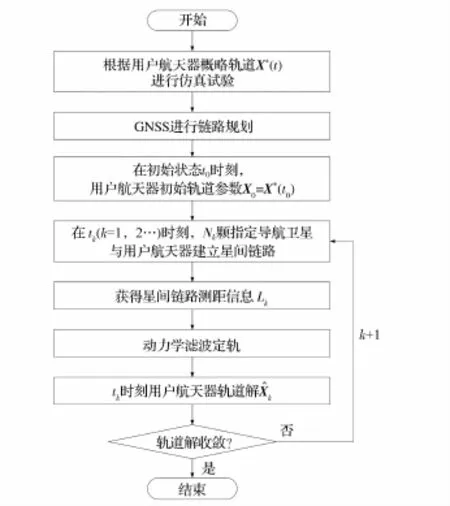
圖3 應用GNSS星間鏈路的定軌流程Fig.3 Orbit determination process using GNSS crosslink
由圖3的定軌流程可以看出:當用戶航天器動力學模型基本確定后,星間測量精度、頻度和星間測量拓撲結構是影響定軌精度的主要因素。星間測量精度由星間鏈路體制確定,而測量頻度和測量拓撲結構則取決于鏈路規劃。對用戶航天器而言,GNSS星間鏈路系統可以根據其概略軌道進行鏈路規劃,在某時刻調度某些導航衛星的星間鏈路天線指向用戶航天器,并與其建立測距鏈路。若令所有幾何可視范圍內的導航衛星都持續地與用戶航天器建立鏈路,理論上,定軌精度會相對提高。由于GNSS星間鏈路首先要服務于系統內部的導航衛星,用戶航天器的可用的資源有限,并且對用戶航天器而言,過高的精度也沒有必要,既會增加計算復雜度,又會造成星間鏈路資源的浪費,因此要綜合平衡用戶航天器的定軌精度需求和可用鏈路資源,對星間鏈路進行合理規劃。
3 仿真試驗及結果分析
鏈路規劃設計的核心是確定測量頻度和測量拓撲結構。由于星間鏈路定軌過程復雜,很難構建準確的理論分析模型,因此仿真分析方法是通常采用的分析策略。下面從用戶航天器與GNSS建立星間鏈路的時間間隔、每次建立鏈路時的導航衛星數目入手,通過研究不同規劃情況下的用戶航天器定軌精度確定合理的鏈路規劃方案。仿真分析的重點是研究鏈路測量頻度、鏈路條數與定軌精度之間的關系,分別針對低軌和高軌兩種用戶航天器軌道展開分析。本文仿真試驗采用的GNSS星座構型為Walker-δ24/3/2,軌道高度為24 000 km,傾角為55°,采用動態指向型星間鏈路,波束角為4°,掃描范圍為±70°[8-9]。
3.1 高軌用戶航天器定軌試驗
考慮到高軌用戶航天器相對于GNSS衛星運動較慢,可采用廣播星歷,將星歷誤差設置為2.00 m,測距隨機誤差設置為0.65 m,殘余系統偏差設置為0.20 m。仿真起止時間為2012年2月1―8日。高軌用戶航天器軌道參數為:軌道半徑為42 164.17 km的GEO,軌道傾角和偏心率為零。仿真標準軌道考慮的動力學模型包括:地球引力場采用8階次JGM3模型;考慮日月引力,日月歷書采用JPL DE 405星歷;采用IERS2003固體潮模型;太陽光壓采用球模型;同時考慮尺度因子和太陽翼方向參數。地球定向參數(EOP)采用IERS B公報參數。
GEO用戶航天器與GNSS的觀測間隔設置為5min、30min、60min、120min、360min這5種模式,在同一時刻建立GNSS星間鏈路的數目設置為10條、5條、2條、1條,采用動力學法進行定軌解算。將不同應用模式下的GEO用戶航天器軌道三維位置誤差均方差作為評價標準,總結如表1所示。
由于篇幅所限,以下只展示部分徑向(R)、切向(T)、法向(N)軌道誤差結果,見圖4和圖5。綜合比較圖4和圖5,并結合表1的定軌精度評價結果可以看出:用戶航天器與GNSS衛星建立星間鏈路的頻度越高、數目越多,則動力學法進行軌道改進的效果越好。當觀測間隔足夠密集時,如每5min進行1次鏈路規劃,則即使每次只有1條觀測鏈路,也能使GEO用戶航天器達到5 m以內的定軌精度。隨著觀測間隔的加長,達到一定精度所需的鏈路數目增多,如每6 h(360min)進行一次觀測時,需要每次規劃10顆導航衛星指向用戶航天器,才能達到5 m以內的定軌精度;若每6 h進行1次觀測,每次僅規劃1條鏈路,就能達到40 m以內的定軌精度。
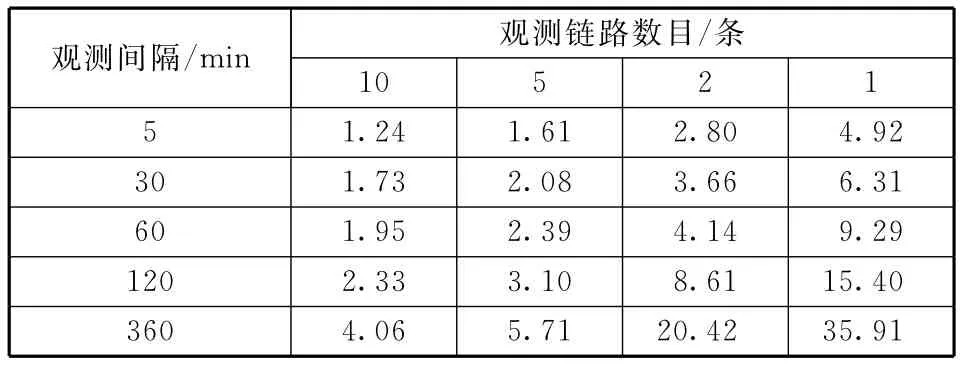
表1 GEO用戶航天器軌道三維位置誤差均方差Table 1 Three dimension position error variance of GEO user spacecraftm
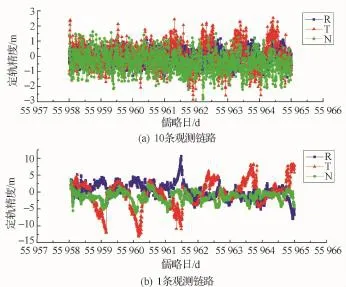
圖4 觀測間隔5min的GEO用戶航天器定軌精度Fig.4 Orbit determination accuracy of GEO user spacecraft with observation intervals of 5min
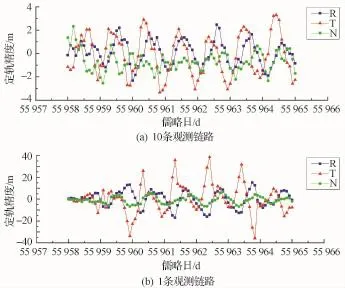
圖5 觀測間隔120min的GEO用戶航天器定軌精度Fig.5 Orbit determination accuracy of GEO user spacecraft with observation intervals of 120min
相比縮短觀測間隔,增加每次觀測鏈路數目對軌道改進的效果提升更明顯。例如:要達到5 m精度時,若每5min觀測1次,在6 h內須要調度衛星的次數為120次;若在6 h內1次調度10顆衛星觀測,也可以達到5 m的精度要求。因此,建議增加每次觀測鏈路的數目,而非縮短觀測間隔,以盡量少的總觀測鏈路數目(即盡量少的星間鏈路的調度總次數)來滿足GEO用戶航天器的定軌需求。
總的來說,對一般GEO用戶航天器,定軌精度的需求為百米量級,利用GNSS星間鏈路都能夠達到。當規劃的觀測間隔足夠密集,或者每次觀測的鏈路足夠多時,可以達到米級的定軌精度。目前,我國的GEO航天器一般采用3~5個區域地面站進行定軌,能達到50 m左右的定軌精度水平。相比較而言,本文提出的利用GNSS星間鏈路進行定軌,可以達到更高的精度,且不依賴地面站,能大大縮減建設維護費用。
3.2 低軌用戶航天器定軌試驗
針對GNSS的普通L頻段下行信號導航業務所不能覆蓋的2000 km軌道高度LEO用戶航天器,進行定軌仿真計算。考慮到LEO用戶航天器相對GNSS衛星運動較快,不利于傳輸廣播星歷,且一般定軌精度要求較高,因此采用精密星歷,將星歷誤差設置為0.50 m,測距隨機誤差設置為0.65 m,殘余系統偏差設置為0.20 m。
LEO用戶航天器與GNSS的觀測間隔設置為5min、30min、60min、120min、360min這5種模式,在同一時刻建立GNSS星間鏈路的數目設置為10條、5條、2條、1條,采用動力學法進行定軌解算。將不同應用模式下的LEO用戶航天器軌道三維位置誤差均方差作為評價標準,總結如表2所示。
由于篇幅所限,以下只展示部分軌道誤差結果,見圖6和圖7。可以看出,當鏈路數目為1條時,定軌精度易出現較大跳變。這是由于對所有可視衛星的篩選并不是最優規劃,當鏈路數目不足時,可能在某些歷元選出的星間鏈路觀測幾何構型較差。綜合比較圖6和圖7,并結合表2的定軌精度評價結果可以看出:LEO用戶航天器與GNSS衛星建立星間鏈路的頻度越高、數目越多,動力學法進行軌道改進的效果越好。當觀測間隔足夠密集時,如每5min進行1次鏈路規劃,則每次1條觀測鏈路也能使LEO用戶航天器達到2 m左右的定軌精度。隨著觀測間隔的加長,如每6 h(360min)進行1次觀測時,則要每次規劃5顆導航衛星指向用戶航天器,才能達到1 m左右的定軌精度;若每6 h進行1次觀測,每次僅規劃1條鏈路,則能達到12 m以內的定軌精度。
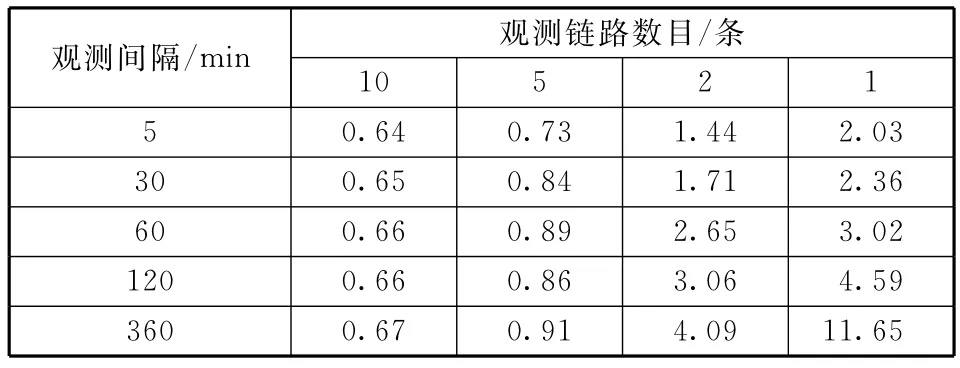
表2 LEO用戶航天器軌道三維位置誤差均方差Table 2 Three dimension position error variance of LEO user spacecraft m
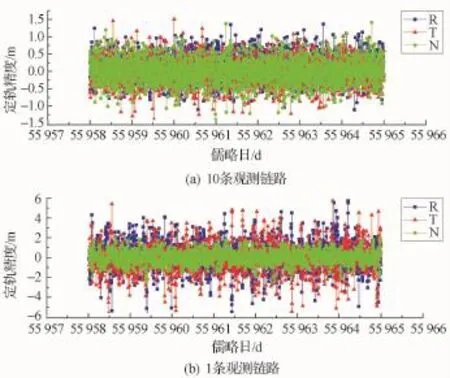
圖6 觀測間隔5min的LEO用戶航天器定軌精度Fig.6 Orbit determination accuracy of LEO user spacecraft with observation intervals of 5min
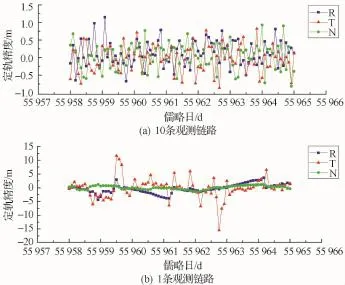
圖7 觀測間隔120min的LEO用戶航天器定軌精度Fig.7 Orbit determination accuracy of LEO user spacecraft with observation intervals of 120min
當觀測鏈路數目增加到一定程度,加密觀測頻度的改進效果有限;相比縮短觀測間隔,增加每次觀測的鏈路數目對軌道改進的效果提升更明顯。例如:要達到1 m精度時,若每5min觀測1次,在6 h內須要調度導航衛星約72次;而若在6 h內1次調度5顆導航衛星觀測,也可以達到1 m的精度要求。因此,建議增加每次觀測鏈路的數目,而非縮短觀測間隔,以盡量少的總觀測鏈路數目(即盡量少的星間鏈路的調度總次數)來滿足LEO用戶航天器的定軌需求。另外,當觀測鏈路數目增加到一定程度時,如每次與8~10顆導航衛星建立鏈路,5min~6 h的觀測間隔下都可以達到0.70 m左右的觀測精度,定軌誤差基本由星間鏈路的測距誤差及星歷誤差引起,已經達到了GNSS星間鏈路實現LEO用戶航天器定軌的理論精度極限,再改變鏈路規劃方式也難以繼續改善定軌結果。
總的來說,對于大部分LEO用戶航天器,定軌精度的需求為米量級,利用GNSS星間鏈路能夠達到。當每次規劃的觀測鏈路足夠多時,可以達到1 m以內的定軌精度。目前,LEO用戶航天器一般采用區域布設地面站進行跟蹤定軌,只能得到有限的觀測弧度,在弧段內采用激光、精密測距及其變率測量系統(PRARE)、多普勒定軌和無線電定位系統(DORIS)等技術手段,后處理定軌精度可優于10 m;采用GNSS接收機,定軌精度可優于1 m。相比較而言,本文提出的利用GNSS星間鏈路進行定軌,不受地域局限,可以完成實時定軌并達到更高的精度。
4 結束語
本文研究了GNSS星間鏈路應用于用戶航天器定軌的模型,設計了應用模式及流程,并針對不同應用模式進行了仿真分析。結果表明:用戶航天器與GNSS衛星建立星間鏈路的頻度越高、數目越多,動力學法進行軌道改進的效果越好;增加觀測鏈路數目比加密觀測間隔更能有效改善定軌精度,在具體工程應用中應根據用戶航天器精度需求進行鏈路規劃配置。
需要指出的是,在本文的仿真中,按一定數目規劃導航衛星時是在幾何可視范圍內隨機選取,并不一定能達到最優的觀測幾何構型。關于GNSS星間鏈路應用于用戶航天器定軌時的鏈路規劃,是另一個值得研究的工程問題,當用戶航天器按照最優規劃與GNSS衛星建立鏈路時,將能夠得到更高的定軌精度。
(References)
[1]Holmes J K,Raghavan S.A summary of the new GPS IIR-M and IIF modernization signals[C]//Proceedings of the 2004 IEEE 60th Vehicular Technology Conference.New York:IEEE,2004:4116-4126
[2]Luba O,Boyd L,Gower A,et al.GPS III system operations concepts[J].IEEE Aerospace and Electronic Systems Magazine,2005,20(1):10-18
[3]Anderson M P,Langer J.Crosslink for the next-generation GPS[C]//Proceedings of the 2003 IEEE Aerospace Conference.New York:IEEE,2003:1589-1596
[4]Liu W,Li Z,Gong X.Study on combined orbit determination of navigation satellites with ground tracking observation and crosslink ranging observation[C]// Proceedings of ION GNSS 2009.Manassas:The Institute of Navigation,2009:1561-1572
[5]陳智,張其善.Galileo系統在空間飛行器定位中的應用[J].宇航學報,2004,25(5):576-579 Chen Zhi,Zhang Qishan.The application of Galileo system on spacecraft positioning[J].Journal of Astronautics,2004,25(5):576-579(in Chinese)
[6]樊士偉,孟軼男,高為廣,等.航天器測定軌技術發展綜述[J].測繪科學技術學報,2013,30(6):549-554 Fan Shiwei,Meng Yinan,Gao Weiguang,et al.Summarizing on the development of spacecraft orbit determination technology[J].Journal of Geomatics Science and Technology,2013,30(6):549-554(in Chinese)
[7]孟軼男,樊士偉,李罡,等.利用GNSS星間鏈路對中高軌航天器測定軌的可行性研究[J].武漢大學學報(信息科學版),2014,39(4):445-449 Meng Yinan,Fan Shiwei,Li Gang,et al.Research on orbit determination of medium-high earth orbital satellite using GNSS crosslink ranging observations[J]. Geomatics and Information Science of Wuhan University,2014,39(4):445-449(in Chinese)
[8]甘慶波,馬劍波,徐勁.基于星敏感器和星間鏈路的衛星星座自主定軌研究[J].中國科學:物理學 力學 天文學,2010,40(4):471-480 Gan Qingbo,Ma Jianbo,Xu Jin.Autonomous orbit determination of satellite constellation based on star sensor and ISLs[J].Science China Physics,Mechanics&Astronomy,2010,40(4):471-480(in Chinese)
[9]張育林,范麗,張燕,等.衛星星座理論與設計 [M].北京:科學出版社,2008 Zhang Yulin,Fan Li,Zhang Yan,et al.Satellite constellation theory and design[M].Beijing:Science Press,2008(in Chinese)
(編輯:夏光)
Analysis of Spacecraft Orbit Determination Method Using GNSS Crosslink
MENG Yinan1FAN Shiwei1YANG Qiangwen1SONG Xiaoyong2
(1 Beijing Institute of Tracking and Telecommunication Technology,Beijing 100094,China)
(2 Xi'an Research Institute of Surveying and Mapping,Xi'an 710054,China)
Considering the limited resource of GNSS(Global Navigation Satellite System)crosslink,an orbit determination model is established based on GNSS crosslink,application process is designed and the impacts of crosslink measurement frequency and crosslink number on orbit determination accuracy are especially studied.Experiments of high-orbit and low-orbit user spacecraft are conducted respectively.Results show that dynamic orbit improvement gets better with more frequent planning and more links;for high-orbit user spacecraft using broadcast ephemeris,orbit accuracy can reach within 40m with one observation link every 6 hours;for low-orbit user spacecraft using precise ephemeris,the accuracy is around 1m with 5 links every time.
GNSS;crosslink;orbit determination;crosslink planning;application mode
V412.41;P228
:ADOI:10.3969/j.issn.1673-8748.2015.05.005
2014-06-06;
:2015-07-01
孟軼男,女,碩士研究生,研究方向為衛星導航技術與應用。Email:mengyinan0915@163.com。
猜你喜歡
車主之友(2022年4期)2022-08-27 00:58:26
知音·下半月(2022年5期)2022-05-23 23:17:04
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年5期)2016-11-28 09:55:15
非公有制企業黨建(2016年1期)2016-07-19 13:02:51
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
衛星與網絡(2016年12期)2016-02-05 09:23:23
創業家(2015年10期)2015-02-27 07:55:08
創業家(2015年10期)2015-02-27 07:54:39