輸電線路絕緣子檢測機器人設計
2015-03-02 07:03:32段軍鵬艾上美
云南電力技術 2015年2期
關鍵詞:檢測
段軍鵬,艾上美
(云南電網公司楚雄供電局,云南 楚雄 675000)
0 前言
由于受到各種環境因素的影響,絕緣子易出現老化或劣化現象[1]。長期運行會出現絕緣電阻降低、表面污穢、開裂甚至擊穿等故障;為了保障輸電線路的安全運行,需要定期對線路的絕緣子進行檢測,確定絕緣子是否需要更換。目前國內絕緣子檢測方法仍為人工檢測,人工檢測方式工作環境差,人員投入大,檢測效率低,而且易造成漏檢及誤檢[2]。為線路絕緣子設計絕緣子檢測機器人對安全運行具有重要意義。
1 機器人概況
絕緣子檢測機器人是由機器人本體結構、機器人控制系統、檢測系統及無線傳輸系統組成的一個復雜系統,機器人融合多項技術如電磁屏蔽技術、信息無線傳輸技術、多傳感器應用技術。絕緣子檢測機器人可以在實際的架空輸電線路中代替線路檢修人員完成對絕緣子串的檢測工作,當絕緣子檢測機器人檢測發現劣化絕緣子片時,機器人將向監控后臺發送警示,預警絕緣子片的絕緣狀態。絕緣子檢測機器人能夠完成在絕緣子串上的上、下行運動,且能夠準確的在檢測位置定位,完成絕緣子片的檢測工作。
絕緣子檢測機器人本體可作為一個移動平臺,可以通過搭載不同的檢測儀器或設備完成以下的幾個功能:
1.1 自動檢測
將機器人放置于絕緣子串上,機器人可以沿著絕緣子串上、下自動行走,通過檢測儀完成對絕緣子片的絕緣特性檢測,檢測結果為分布電壓或者絕緣電阻,從而確定劣質絕緣子,機器人將檢測結果實時傳輸至監控設備,給予檢測人員警告。
1.2 外觀識別
通過搭載微型攝像機,絕緣子檢測機器人可以監控絕緣子片的外觀,如鋼帽、瓷片裂紋等缺陷進行識別,檢測表面污穢,通過天線將機器人監控的圖像實時傳送至顯示儀器。
1.3 智能操控
絕緣子檢測機器人可以按照預先設計的程序進行絕緣子串的檢測,也可根據現場環境更改機器人運動邏輯及運動速度,使機器人的控制更加機動靈活,更加符合現場的實際場合。
2 絕緣子檢測機器人設計
2.1 絕緣子檢測機器人本體系統設計
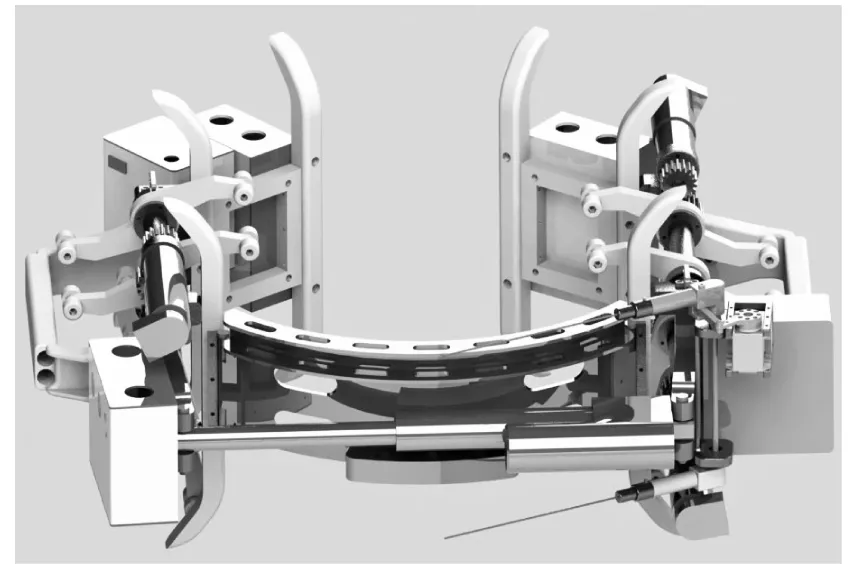
圖1 絕緣子串檢測機器人產品圖
檢測機器人主要由爬行部分、伸縮部分組成,爬行部分的主要功能是實現機器人在絕緣子串上的前后爬行動作,爬行部分為兩組對稱安裝方式,此結構保證機器人的受力更加均衡,整機中心分配更加合理。機器人的轉動件應該盡量靠近絕緣子片的邊緣;可保證機器人可順利通過均壓環;從而保證了機器人能夠完成對整串絕緣子的檢測工作。
2.2 檢測機器人控制系統設計
絕緣子檢測機器人控制系統總體分為:機器人本體部分和無線監控設備部分見圖2,本體部分完成機器人位置信息的采集及判定,輸出控制攀爬指令完成機器人智能前后爬行動作,機器人上運用多個位置傳感器,電路采用PID 閉環控制系統,向絕緣子電阻檢測模塊輸出控制命令完成檢測并讀取檢測信息,將絕緣子檢測信息通過無線模塊傳輸給無線監控設備,完成機器人與地面操作人員的人機信息交互。
絕緣子檢測機器人本體系統軟件采用C 語言編程,軟件平臺應用ICCAVR 編譯平臺和KEIL MDK 軟件編譯平臺,調試平臺應用ATMEL 的AVR Studio 4.02。軟件采用模塊化設計,易于維護和擴充,可移植性強。監控終端基于Windows操作系統,采用Visual C++進行終端軟件測編寫。

圖2 絕緣子機器人控制系統示意圖
2.3 樣機實驗及零值檢測
由于絕緣子與輸電線、桿塔之間存在雜散電容,導致絕緣子串上的電壓并非均勻分布,局部場強較高,從而容易產生電暈、劣化、閃絡甚至擊穿。.為防止運行中的絕緣子被擊穿,必須要使絕緣子串上分壓最小的絕緣子其壓降小于擊穿電壓,并留有一定裕度。由于分布電壓能反映絕緣子的一些電氣特性,如污穢分布狀況,絕緣子絕緣狀況等。
對絕緣子檢測機器人在進行高壓帶電試驗,通過采用“絕緣子電壓分布測量儀”來判劣質絕緣子片,其中的第5 片絕緣子為在搭建試驗環境時人為放置的劣質絕緣子,在線路端依次施加220 kV、330 kV、500 kV 線路電壓,由機器人分別三次進行帶電檢測。
通過在高壓試驗室對絕緣子串的帶電測試,試驗結果如下:

圖3 絕緣子檢測機器人檢測的電壓分布圖
1)絕緣子檢測機器人成功的完成第5 片裂化絕緣子的檢出工作,檢測結果與實際結果相同,機器人的的檢測精度可靠,絕緣子檢測機器人將檢測結果傳輸至監控終端,結果直觀。
2)絕緣子檢測機器人的爬行速度在實際環境下可以按照需要設置,檢測時間短,移動速度快。
3 結束語
絕緣子檢測機器人基于輸電線路絕緣子串分布電壓的特點,結合線路的高場強環境特點,采用電磁屏蔽技術、數據采集及無線傳輸技術,完成了絕緣子檢測機器人在高壓試驗室的帶電試驗,成功的檢出其中的裂化絕緣子片。該機器人結構緊湊,移動速度快,提高了絕緣子片檢修工作的效率,為實際架空輸電線路大量的絕緣子片檢修工作提供了新的解決思路,為保證架空輸電線路的可靠、安全運行提供了新的技術保障。
[1]Q/GDW 515.1-2010 交流架空輸電線路用絕緣子使用導則第一部分:瓷、玻璃絕緣子[S].中國電力出版社:國家電網公司,2010 年10 月.
[2]朱虎,李衛國,林冶.絕緣子檢測方法的現狀與發展[J].電瓷避雷器,2006,(6):13-17.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
