智能小車相互超車的研究與設計
2015-03-05 02:34:53中南林業科技大學計算機與信息工程學院賓澤民吳舒辭
電子世界 2015年17期
中南林業科技大學計算機與信息工程學院 賓澤民 吳舒辭
?
智能小車相互超車的研究與設計
中南林業科技大學計算機與信息工程學院 賓澤民 吳舒辭
【摘要】本文是基于“2011年全國大學生電子設計競賽”C題智能小車展開的研究與設計。該系統主要由凌陽單片機小系統,超聲波模塊,無線模塊,紅外反射傳感器st178等構成。超聲波實時檢測兩車的距離,通過無線模塊進行數據的傳輸,構成一個大反饋系統,實現兩車協調行駛。在超車區域,超車車輛通過無線模塊發出超車信號,實現超車。超車后,發送超車完畢信號給另一輛小車,結束超車過程。紅外反射傳感器能檢測黑線,從而實現超車或轉彎目的;當小車行駛到黑色邊框線附近時,安裝在兩邊的st178就能檢測到,控制電機PWM調速,調整小車向遠離邊界線方向行駛,保證小車在正常軌道運行。
【關鍵詞】凌陽單片機;超聲波模塊;無線模塊;紅外反射傳感器
1 引言
智能小車是一個集環境感知、規劃決策、自動行駛等功能于一體的綜合系統,它集中地運用了計算機、傳感、信息、通訊、導航、人工智能及自動控制等技術、是典型的高新技術綜合體。
智能小車,在當今運用十分廣泛,在軍事上,能進行偵查以及排彈等任務。在民用領域,無人駕駛已經成為各車企研究的重點,然而智能小車是智能車輛的仿真車,是研究智能車輛的基礎。在航天領域,它也扮演重要的角色,如我國“月兔”號探月車正在月球上執行各種任務。
本文研究并設計了兩輛小車如何在無軌道的路線如何防止碰撞以及超車。該系統主要由凌陽單片機小系統,超聲波模塊,無線模塊,紅外反射傳感器st178等構成。超聲波實時檢測兩車的距離,通過無線模塊進行數據的傳輸,構成一個大反饋系統,實現兩車協調行駛。
2 系統總體方案
2.1 轉彎模塊
用PWM調速,當檢測到標志線后,控制小車外輪比內輪速度大,當外輪比內輪多行駛38cm,就改變兩個輪子的速度,使其一樣。這樣既能在不減速的條件下,實現轉彎,節省時間,又能有效的防止兩輛小車發生碰撞。
2.2 測距模塊
采用超聲波測距。12米范圍內,超聲波測距是目前已知的所有檢測技術中最可靠的。超聲波指向性強,能量消耗緩慢,在介質中傳播的距離較遠;超聲波測距比較迅速、方便、計算簡單、易于做到實時控制,并且在測量精度方面能達到工業實用的要求。
2.3 標志線和邊框檢測模塊
用ST178H2型光電對管[4]。ST178H2采用高發射功率紅外光電二極管和高靈敏度光電晶體管組成;檢測距離可調整范圍大(4-10mm可用);采用非接觸檢測方式。采用ST178H2完全可以有效的降低干擾,而且方便可行,能夠準確的實施檢測。
2.4 電機驅動模塊
采用電機專用驅動芯片L298N[1]。一片L298N能夠驅動后輪的兩個直流電機,其驅動電流能達到1.2A,且速度調節和轉動方向控制方便,電路簡單,使用方便。
3 硬件電路設計
3.1 主控制模塊的總體設計
本系統由凌陽SPCE061A單片機作為控制核心,由IOB0~3連接驅動,控制電機運動;為了能實時的檢測兩車的距離,使用超聲波模塊,使能端EN接IOA6,接收端BACK接IOA5;采用無線模塊實現兩輛小車直接的通信,無線模塊的CE,CS,DR1,CLK1,DATA1,DR2,CLK2,
DATA2分別接單片機IOB8~15;兩個紅外對管,輸出端分別接IOB4~5,實現精確測速;小車前部中間裝三個光電傳感器,用來檢測標志線,其輸出的高低電平接單片機IOA0~1;另外車前的左右位置各裝一個光電傳感器,輸出接IOA3~4,用來檢測黑色邊線,防止小車沖出跑道。總體設計圖如圖1[5]所示。
3.2 電機驅動電路
該驅動主要是通過SPCE061A單片機的I/O口,采用PWM調速,控制直流電機的加速、減速、正轉和反轉等功能。經分析可知小車的速度與脈寬成正比,所以單片機發出的脈沖信號的比即可決定PWM放大器輸出的電壓平均值的大小。
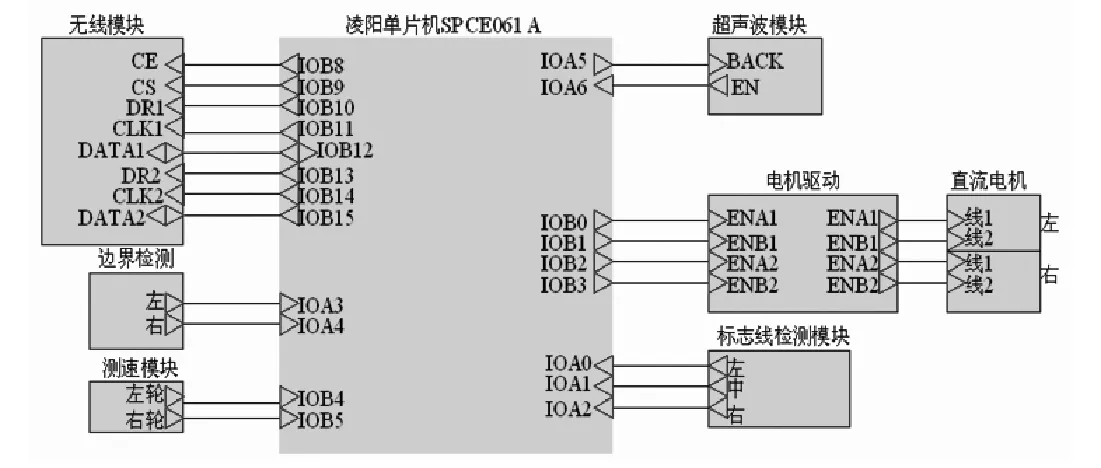
圖1 主控模塊電路圖
3.3 黑膠帶檢測電路
紅外反射傳感器st178都裝小車前部的左中右方向,左右位置各一個,中間位置三。各輸出口分別與單片機SPCE061A的IOA0~4連接,高電平有效。
3.4 超聲波電路
分別在兩輛小車的前部各裝一個超聲波傳感器[2],傳感器的VCC和GND分別連單片機的正和負,使能端EN和接收端BANK分別連單片機的IOA6,IOA5。
3.5 無線傳輸電路
兩輛小車上各裝有一塊無線模塊,都是CE、DR2、CLK2、DATA2、CS、DR1、CLK1、DATA1分別連接在單片機的IOB8~15,PWR-UP和GND分別接單片機正和負。
4 軟件設計
小車通過超聲波模塊檢測距離,通過無線模塊傳輸信號,兩車構成一個大的反饋回路,實時的控制小車運動。甲乙兩車流程圖[3]如2、圖3所示。
5 系統測試
5.1 測試工具
秒表。
5.2 測試步驟
(1)分別記錄甲乙兩車正常行駛一圈所用的時間s,如表1所示。
(2)乙車通過超車標志線后在超車區實現超車,并先于甲車到達終點標志線所用的時間s,以及此過程中發生碰撞的次數如表2所示。
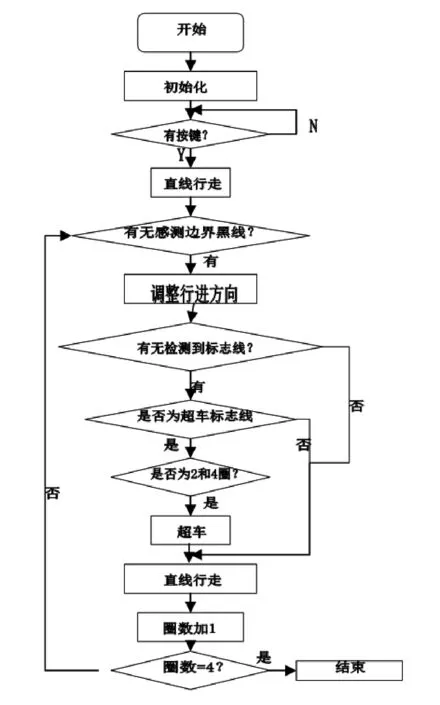
圖2 甲車行駛流程圖

圖3 乙車行駛流程圖

表1 行駛一圈所用時間

表3 跑完整個過程情形

表4 重新設置起始位置情形

表2 超車過車中運動狀態
(3)甲車從起點標志線出發,兩車交替領跑行駛四圈,分別記錄每圈行駛的時間,總時間s,以及發生碰撞次數如表3所示。
(4)重新設定甲車的起始位置(在離起點標志線前進方向40cm范圍內任意設定),實現甲、乙兩車四圈交替領跑的記錄如表4所示。
5.3 測試結果分析
從表一可知,甲乙兩小車,行駛一圈的時間不同,主要是受電機的型號,車輪大小等方面因素影響。根據表格可知,每圈行駛的時間不同,這主要是因為小車每圈中行駛的路徑的變化影響。在超車過程中,沒發現兩小車碰撞現象,說明小車的實行路徑規劃很好,以及防碰撞功能比較優異。
6 結論與總結
該設計要求路徑規劃比較好,利用反饋回路,使系統比較穩定,既能順利完成超車,又不會發生碰撞,并在盡量短的時間內完成任務。由于采用的電機轉速較小,要使小車在盡量短的時間內完成任務,小車行駛的速度就成為了瓶頸。
參考文獻
[1]康華光,陳大欽.電子技術基礎(模擬部分)(第四版)[M].武漢:華中理工大學出版社,2002.
[2]全國大學生電子設計競賽組委會.全國電子設計競賽獲獎作品選編(2007)[M].北京:北京理工大學出版社,2008.
[3]徐士良.常用算法程序集(c語言描敘)(第三版)[M].北京:清華大學出版社,2004.
[4]黃智偉.全國大學生電子設計競賽電路設計(第二版)[M].北京:北京航空航天大學出版社,2011.
[5]黃正瑾.綜合電子設計與實踐[M].南京:東南大學出版社,2003.
賓澤民(1990—) ,男,湖南株洲人,中南林業科技大學碩士研究生,研究方向:智能控制與自動化。
作者簡介: