無線傳感網絡時間同步方案研究
2015-03-11 08:20:34ResearchontheTimeSynchronizationSchemeforWirelessSensorNetwork
自動化儀表 2015年8期
Research on the Time Synchronization Scheme for Wireless Sensor Network
李 源 劉孝先 徐郭建 崔燕明 陳建明
(國網重慶市電力公司信息通信分公司,重慶 400014)
無線傳感網絡時間同步方案研究
Research on the Time Synchronization Scheme for Wireless Sensor Network
李源劉孝先徐郭建崔燕明陳建明
(國網重慶市電力公司信息通信分公司,重慶400014)
摘要:針對無線傳感器網絡(WSNs)對時鐘準確性和精確性(精準性)的嚴格要求,提出了可應用于持續負荷的無線傳感網絡的功率警醒時間同步協議(發送-接收的類型)。在該方案中,可忽略數據傳輸過程中的大部分非確定時間延遲,并綜合考慮傳感器節點(SN)的可靠與不可靠數據傳輸。應用結果驗證了時間同步(微秒級)的準確性和電傳感器節點電池的節能性,表明了所提協議的可用性。
關鍵詞:無線傳感器網絡(WSN)傳感器節點時間同步時間延遲路由協議
Abstract:In accordance with the strict requirements on accuracy and precision of clock for wireless sensor network (WSN), the power aware time synchronization protocol (send-receive type) which can be used in continuous loaded WSN is proposed. In this scheme, most non-determined time delay in data transmission can be ignored, and the reliable and unreliable data transmission of the sensor nodes can be comprehensively considered. The application results verify the accuracy of time synchronization and energy saving of the battery powered sensor nodes;this indicates that the protocol given is feasible.
Keywords:Wireless sensor network(WSN)Sensor nodeTime synchronizationTime delayRouting protocol
0引言
無線傳感器網絡由大量帶有放射裝置的傳感器節點相互協作構成,可布置于任何實際環境中,廣泛應用于環境監測、安保、運輸和醫療等行業中[1]。由于無線傳感器網絡的使用基于數據的到達時間,因此需要確定事件準確發生的時間。同步網絡時間對于無線傳感器網絡的能效規劃和電力管理也極為重要。
大多無線傳感器時間同步方法集中于獲得整體網絡的高同步準確性,而未考慮電能的消耗[2-3]。其他方式通過降低同步復雜性或者增加同步時間來提高電效率[4-5]。近期,也有一些無線傳感器的同步技術,它們的共同目標是在實際網絡同步狀態的基礎上,通過盡可能地減少同步事件來節省電能[6]。當前的時間同步協議[7],并不直接考慮無線傳感器網絡接收和發送數據時程序執行產生的延遲。這種延遲可能恰好是幾毫秒[8],因此不可以忽略,需要根據傳感器節點的CPU時鐘頻率來調整。
本文在充分研究了現有時間同步協議的基礎上,提出了一種可靠的電力提醒時間同步協議,并驗證了其可行性。
1時鐘模型
傳感器節點由兩種不同的時鐘振蕩器驅動,分別為系統時鐘振蕩器和局部時鐘振蕩器,局部時鐘振蕩器沒有中斷。為了提供維持正確時間(局部時間戳)的信號,局部時鐘振蕩器可生成不同的時間單元。傳感器節點使用兩個局部時鐘振蕩器,這是因為局部時鐘振蕩器可持續運行,系統時鐘振蕩器則相反,它會降低或停止CPU進入節能模式,導致時間信息的丟失。因此,不能只使用系統時鐘振蕩器保持時間[9]。
大部分計算機振蕩器沒有穩定準確的頻率,所以它們不能生成準確的時間間隔。由于生產技術、環境溫度、壓力、電池電壓、振蕩器老化和其他影響,晶體振蕩器的運行略有不同。晶體振蕩器精度范圍從1×10-6~50×10-6。這意味著某晶體振蕩器的標準頻率只有1 MHz,兩個傳感器節點時差可能為1~50 μs,甚至很小的頻率偏移也會帶來0.864~4.32 s的不確定性[10]。
1.1 局部時鐘振蕩器模型

由于時鐘的不準確性,其工作范圍為:
1-ρ≤?C/?t≤1+ρ
(1)
式中:ρ為制造商提供的最大斜率。
快、慢時鐘以及合適的時鐘[6]如圖1所示。其中tSN為無線傳感器網絡中的節點時間,t為普遍時間日歷。

圖1 快、慢時鐘以及合適的時鐘
由此可知,局部時鐘差?C和實際時差?t可以由以下區間分界:

(2)
1.2 時鐘電路
電路生成時鐘信號的基本框圖如圖2所示。它包括兩部分:①局部時鐘振蕩器,作為獨立單元;②時間端口和C_Timer,作為傳感器節點的計算子系統組件。局部振蕩器由感通元件、時鐘驅動程序和硬件計數器組成。計算機子系統經由時間端口接收硬件計數器。軟件可以使用這個值來設置初始時間戳值。在發送和接收數據包期間,C_Timer用于高分辨率時間測定。

圖2 時鐘電路及其相關時間器硬件的基本框圖
此方法中,局部時鐘振蕩器會在CPU和其他外部電源關閉時繼續運行。在接收傳感器節點開啟狀態時,C_Timer的當前值用來更新局部時間戳值。
1.3 時間同步的要求
無線傳感器網絡中的定位同步原因有幾點。第一,傳感器節點需要協作運行,以完成復雜的感知功能。第二,采用同步手段旨在增加生命周期。無線傳感器網絡中的許多程序在時間上耦合,意味著所有傳感器節點中的時間戳是相同的,為此需增強時間同步協議。傳感器節點在傳感器網絡中通過數據包交換,允許一個傳感器節點相對于其他節點進行時間估計。同步可以是總體或局部,總體同步時所有傳感器節點從單一來源同步,而局部同步僅需要鄰近傳感器對同步。
現在假設無線傳感器網絡由主傳感器節點和從傳感器節點對構成,通過從主向從發送數據包實現時間同步。來自主傳感器節點的時鐘信號,在不同的局部時間到達不同的傳感器節點,無線傳感器網絡中的時鐘傾斜是傳感器節點時間同步運行的結果。時鐘傾斜是許多不同限制因素引起的。這些因素可以分為:①物理因素,如無線連接長度、跳躍次數、數據傳輸率、傳輸密度;②硬件,使用傳感器節點的類型、運行速率;③軟件,時間同步協議、考慮到達同步數據包時間的反應時間延遲。上述限制因素中部分可作為確定性特征(無線連接長度、運行速率、時間同步協議等),其他因素可作為不確定特征(傳輸密度、時間-時間同步數據包反應延遲)。
設計時間同步協議的主要目標是使式(2)定義的時間間隔盡可能小,即接近于零,可以通過以下兩種方法實現。
① 使用穩定的時間同步時鐘振蕩器(更高的成本和電耗)。
② 所有時間不確定性因素都可以消除或預測至合適的精度,而時間確定因素可以預測,在時間戳過程中也可以考慮。由于其較低的成本和電耗,本文選用此方法。
2工作周期操作模式
2.1 局部時鐘振蕩器和T_timer的功能
本文中,局部時鐘振蕩器用于確定循環周期和創建局部時間戳。為了提高時間分辨率測量和間接降低同步誤差,當CPU進入到主動模式時,所有時間延遲由局部系統時鐘振蕩器定義的分辨率衡量,即計算子系統中安裝的C_Timer(如圖2所示)。
2.2 工作周期定義
完整的時間同步段示意圖如圖3所示。

圖3 完整的時間同步段
節點的電波開啟或關閉的時間段分別定義為活躍(TON)和休眠期(TOFF)。期間,活動和非活動時期指的是一個節點的廣播打開和關閉的時間段。總同步時間TΣ為:
TΣ=TOFF+TON
(3)
傳感器節點電波開啟的時間與完整時間同步段的商即工作周期,定義為:
(4)
式中:Tproc為發送信號、數據處理和數據傳遞所需的過程時間;Tguard為保護時間。
頻率變化導致傳感器節點間的相對時鐘發生偏移。所以,傳感器節點必須包括保護時間。保護時間等于最大偏移量,與TΣ線性相關。令sskew=Δf/f為頻率變化,TΣ與總時間同步段相關,則保護時間的最小值為Tguard=2TΣsskew。活躍段不重疊的節點不能互相通信。
3時間延遲部件
傳統的時間同步協議需要鑒別出同步期間誤差產生的主要時間延遲部件。首先,時鐘會根據環境因素變化延遲,如電補給、濕度和溫度。這些會影響無線傳感器網絡中的準確時間同步。這些影響的誤差值取決于時間同步段。當時間同步段小于1 s時,誤差范圍為納秒級;當時間同步段較大(如>24 h)時,誤差范圍為毫秒級。根據量級,假設誤差較小。本文選取數據包進行傳輸通信,如圖4所示。

圖4 數據包傳輸示意圖
由圖4可知,協議的信息傳送由6個時間延遲成分組成:取得延遲(TF)、媒質通道延遲(TMA)、傳遞延遲(TT)、發射傳播延遲(TP)、接收延遲(TRP)和處理延遲(TPD)。這些組成成分中有一些是確定的,一些是不確定的。不確定的時間傳遞延遲是由準確的時間同步決定的,因為它們會使接收器很難估計數據包發送和接收的時間。
4電力提醒的時間接收協議
4.1 數據包結構
數據包結構如圖5所示,包括序文、合成器、長度、地址、數據和CRC字段。

圖5 數據格式
4.2 延遲補償
時鐘模型和時間延遲對于電力提醒時間同步協議運行的影響分析如下:①在時間戳制造和更新的過程上,可以繞開不確定性的延遲;②要考慮確定性延遲,采用的方法為隨時間分辨率的持續,預先估計延遲。
4.3 時間戳格式的定義
時間戳執行為n級計數器。計數器會在局部時間振蕩器產生單位時間持續脈沖時計數。在傳感器節點中,時間戳及其時鐘一般基于32 768 Hz晶體。此晶體具有良好的短期穩定性但不支持高分辨率,因為它有30.5 μs的小幅段。
根據應用情況,時間戳分辨率可以用時間單位(秒、毫秒或微秒)表示。在本文安全中,時間戳結構由4 B組成,其格式如圖6所示。

圖6 時間戳格式
時間戳由以下條件定義:①Micro-5字節保留為微秒分辨率(案例中一步長為30.5 μs);②Mili-10字節為毫秒級;③Sec-6字節為秒級;④Min-6字節為分鐘級;⑤Hour-5字節為小時級。
4.4 確定性時間延遲值
此部分分析如何估計確定的時間延遲TF1、TP的影響。TRP、TF1為包含在傳遞器中的時間延遲。它包括從時間戳開始,讀到其傳至RF緩沖區的延遲。TF1為幾個時鐘回路的序列(這里為CPU時鐘回路)。TF1的一個修正值包括在傳遞器的時間戳內。
在無線傳感器網絡中,傳感器節點間的距離較短,范圍從幾十到幾百米。發射信號傳播速度為300 m/μs,時間延遲小于1 μs。在本方案中,采用32 kHz的局部時鐘振蕩器,并用30.5 μs的時間分辨率操縱,可以保證較低的時間不確定性。
現在主要的目標為用最小的誤差估計時間延遲TPD。為進行修正估計,需要知道CPU的時鐘頻率,以及為局部時間更新制造程序的大小。
根據CRC檢查和局部時間戳更新的程序大小估計TPD。程序大小由系統時鐘振蕩器回路數表示。
綜上所述,總確定時間延遲等于:
TDE=TF1+TRP+TPD
(5)
對于64位數據包大小,可以確定發送和接收程序列的時鐘回路個數。
當系統時鐘振蕩器頻率從1 MHz變化至32 MHz,數據傳遞速度范圍從50 kbit/s至720 kbit/s時,每個傳遞64位數據包的確定性時間延遲如表1所示。表1中,“*”表示CPU在程序列中為接收數據包所消耗的時間延遲,大于傳送數據所需時間。

表1 64位數據包時間延遲
圖7(a)和圖7(b)分別展示了系統時鐘振蕩器頻率為64位數據包和128 kbit/s傳遞速度條件下的總延遲量。由圖7可知,①存在兩種運行區域,高依賴區域和低依賴區域。高依賴區域是系統時鐘振蕩頻率<2 MHz的典型,而低依賴區域為系統時鐘振蕩器頻率>2 MHz。②對于給定的數據傳遞速度,當系統時鐘振蕩器頻率>2 MHz時,時間延遲達到漸近值。此時系統時鐘振蕩器臨界頻率近似為2 MHz。③當系統時鐘振蕩器頻率<1 MHz時,時間延遲以指數形式增加。④當數據包容量增加時時間延遲也增加,而提高數據傳輸速度會降低延遲。⑤一般低依賴區域更適合時間同步。
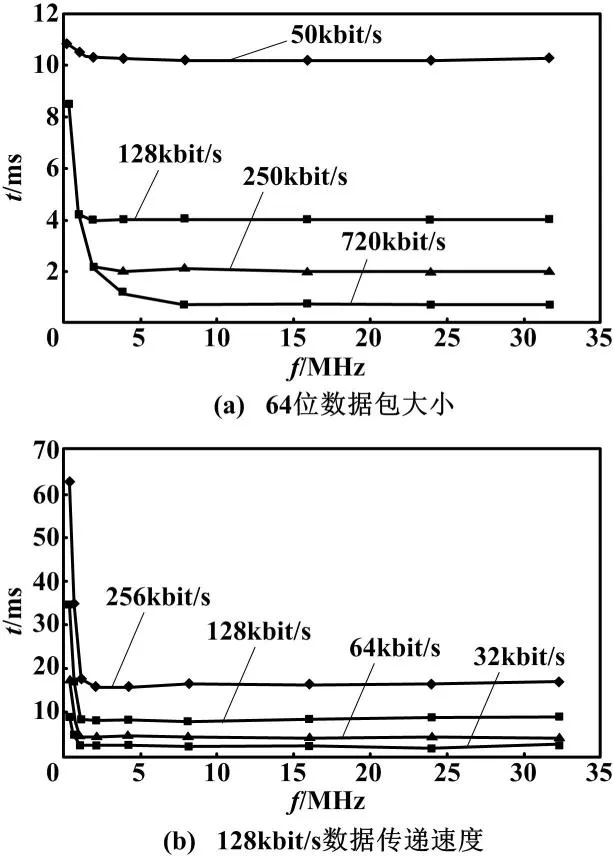
圖7 考慮系統時鐘振蕩器頻率的總時間延遲
4.5 總時間誤差估計的建議
對如何評估所提方法的總時間誤差,建議如下。
① 收到數據包后迅速發送數據和更新時間戳期間,通過制造時間戳避開主要不確定性時間延遲(TF和TMA)的影響。
② 根據程序結構,相對準確地計算所有確定性時間延遲,并將它們作為時間戳制造和更新期間的時間修正因素。
③ 部分不確定性時間延遲很難準確預測。這些延遲一般出現在CPU等待執行中斷程序時,或者是CPU與射頻調制器之間通信的異步運行。
④ 不同系統時鐘振蕩器頻率條件下的總誤差如表2所示。表2中,ρTR指發射器和接收器的系統時鐘振蕩器之間的偏移。由表2可知,總時間同步誤差在毫秒范圍內,它的絕對值隨著系統時鐘振蕩器頻率的升高而降低。

表2 不同系統時鐘振蕩器頻率條件下的總誤差
5結束語
在無線傳感器應用中,時間同步為所有傳感器節點提供了相同的運行時間容量,現今很多不同的時間同步方法已經投入應用。本文提出了一種電力提醒的時間同步協議,屬于單通道傳播,實現簡單,只需要傳感器節點同步所用的單數據包傳輸器,所需資源少。此外,它避開了時間戳制造和更新時的主要非確定性時間延遲,可以獲得時間同步相對準確的時間情況。
參考文獻
[1] Yick J,Mukherjee B,Ghosal D.Wireless sensor networks survey[J].Computer Networks,2008,52(12):2292-2330.
[2] 楊朔,李長庚.無線傳感器網絡泛洪時間同步協議安全算法[J].傳感器與微系統,2014(1):137-140.
[3] Sundararaman B,Buy U,Kshemkalyani A.Clock synchronization for wireless sensor networks:a survey[J].Ad Hoc Networks,2006,3(3):281-323.
[4] 陳珍萍,黃友銳,唐超禮,等.無線傳感器網絡能量有效精度可控時間同步[J].電子測量與儀器學報,2014(6):597-603.
[5] 諸軍,馬娜,吳波,等.基于層次結構的無線傳感器網絡時間同步研究[J].電氣自動化,2014(5):33-34.
[6] Wu Y C,Chaudhari Q,Serpedin E.Clock synchronization of wireless sensor networks[J].IEEE Signal Process Mag,2011,28(1):124-138.
[7] Rahamatkar S,Agarwal A,Kumar N.Analysis and comparative study of clock synchronization schemes in WSN[J].International Journal of Computer Science Engineering,2010,2(3):536-41.
[8] 王建平,孔德川,陳偉.一種基于多普勒效應的水下無線傳感器網絡時間同步機制[J].傳感技術學報,2014(5):680-686.
[9] Schmid T,Shea R,Charbiwala Z,et al.On the interaction of clocks,power,and synchronization in duty-cycled embedded sensor nodes[J].ACM Transactions on Sensor Networks,2010,7(3):1-19.
[10]Williams S,Frampton K,Amundson I,et al.Decentralized acoustic source localization in a distributed sensor network[J].Applied Acoustics,2006,67(10):996-1008.
中圖分類號:TH89;TP29
文獻標志碼:A
DOI:10.16086/j.cnki.issn1000-0380.201508012
修改稿收到日期:2015-02-02。
第一作者李源(1984-),女,2009年畢業于成都理工大學信號與信息處理專業,獲碩士學位,工程師;主要從事電力系統通信技術研究。
