LM算法在二階過阻尼系統(tǒng)參數(shù)估計(jì)中的應(yīng)用
2015-03-11 07:40:34ApplicationofLMAlgorithminParameterEstimationforSecondorderOverdampedSystem
自動(dòng)化儀表 2015年7期
Application of LM Algorithm in Parameter Estimation for Second-order Over-damped System
李敏花 柏 猛 呂英俊
(山東科技大學(xué)電氣信息系,山東 濟(jì)南 250031)
LM算法在二階過阻尼系統(tǒng)參數(shù)估計(jì)中的應(yīng)用
Application of LM Algorithm in Parameter Estimation for Second-order Over-damped System
李敏花柏猛呂英俊
(山東科技大學(xué)電氣信息系,山東 濟(jì)南250031)
摘要:針對(duì)二階過阻尼系統(tǒng)傳遞函數(shù)的參數(shù)辨識(shí)問題,提出一種根據(jù)二階過阻尼系統(tǒng)階躍響應(yīng)估計(jì)系統(tǒng)傳遞函數(shù)未知參數(shù)的新方法。該方法首先求解出二階過阻尼系統(tǒng)的階躍響應(yīng)表達(dá)式,然后定義模型輸出與觀測(cè)數(shù)據(jù)的差值作為代價(jià)函數(shù),將參數(shù)估計(jì)問題轉(zhuǎn)換為非線性最小二乘問題。通過采用Levenberg-Marquarat算法極小化代價(jià)函數(shù),估計(jì)出系統(tǒng)未知參數(shù)。為確定參數(shù)估計(jì)的初值,給出采用兩點(diǎn)法的參數(shù)初值估計(jì)方法。仿真結(jié)果表明,在含有觀測(cè)噪聲的情況下,提出的方法能有效解決過阻尼二階系統(tǒng)未知參數(shù)的估計(jì)問題。
關(guān)鍵詞:二階過阻尼系統(tǒng)傳遞函數(shù)參數(shù)估計(jì)階躍響應(yīng)非線性最小二乘Levenberg-Marquarat算法觀測(cè)噪聲
Abstract:Aiming at the problem of parameter identification for transfer function of two order over damping system, a novel method for estimating unknown parameters in transfer function of the second order over-damped system in accordance with its step response is proposed. With this method, firstly, the expression of the step response of the second order over-damped system is solved, then defining the difference between the model output and observed data as the cost function, the issue of parameter estimation is converted into a nonlinear least square topic. The cost function is minimized through using Levenberg-Marquarat (L-M) algorithm, to estimate unknown parameters of the system. In order to determine that initial value for parameter estimation, the estimation method of initial value two-point method is given. The results of simulation demonstrate that the method proposed can effectively solve the problem for unknown parameter estimation of such system under observation noises exist.
Keywords:Second-order over-damped systemTransfer functionParameter estimationStep responseNonlinear least square
Levenberg-Marquarat algorithmObservation noise
0引言
在基于模型的控制系統(tǒng)設(shè)計(jì)中,建立系統(tǒng)動(dòng)態(tài)模型是控制器設(shè)計(jì)的前提,模型的精確程度直接影響所設(shè)計(jì)控制系統(tǒng)的性能。在眾多的系統(tǒng)模型中,二階系統(tǒng)模型被廣泛應(yīng)用于慣導(dǎo)系統(tǒng)[1]、化工過程、機(jī)電設(shè)備等系統(tǒng)的建模,在實(shí)際應(yīng)用中,獲得這些系統(tǒng)模型最有效的途徑是系統(tǒng)辨識(shí)。雖然近年來在采用系統(tǒng)辨識(shí)方法獲取二階系統(tǒng)傳遞函數(shù)的研究方面已取得較大進(jìn)展[1-4],但對(duì)一些化工過程和無法實(shí)現(xiàn)頻繁啟動(dòng)的機(jī)電設(shè)備,現(xiàn)實(shí)的建模方法依然是通過系統(tǒng)階躍響應(yīng)數(shù)據(jù)獲取系統(tǒng)模型。目前,由階躍響應(yīng)曲線辨識(shí)二階系統(tǒng)傳遞函數(shù)參數(shù)的經(jīng)典方法主要有兩點(diǎn)法、相良節(jié)夫法、半對(duì)數(shù)法和面積法等[2]。但這些方法的精度受觀測(cè)噪聲的影響較大,對(duì)此,本文提出一種基于數(shù)據(jù)擬合的二階過阻尼系統(tǒng)參數(shù)辨識(shí)方法。該方法通過將二階系統(tǒng)的參數(shù)辨識(shí)問題轉(zhuǎn)換為階躍響應(yīng)數(shù)據(jù)的擬合問題,采用非線性最小二乘方法解決含有觀測(cè)噪聲情況下二階過阻尼系統(tǒng)的參數(shù)辨識(shí)問題。
1非線性最小二乘參數(shù)估計(jì)方法
1.1 算法原理
在不考慮時(shí)間滯后的情況下,典型二階過阻尼系統(tǒng)傳遞函數(shù)可表示為:
(1)
式中:T1和T2為時(shí)間常數(shù),且T1≥T2。在零初始狀態(tài)下,二階過阻尼系統(tǒng)的單位階躍響應(yīng)可表示為:
(2)
假設(shè)在ti時(shí)刻,系統(tǒng)階躍響應(yīng)y(ti)的觀測(cè)值為z(ti),且有:
z(ti)=y(ti)+v(ti)
(3)
式中:v(ti)為觀測(cè)噪聲,i=1,2,…,N。
令z(i)=z(ti)、y(i)=y(ti)、θ=[T1,T2]T,則二階系統(tǒng)未知參數(shù)θ的估計(jì)問題可轉(zhuǎn)化為如下函數(shù)的極小化問題:
(4)
式中:J(θ)為代價(jià)函數(shù)。
(5)
顯然,代價(jià)函數(shù)J(θ)的極小化問題是典型的非線性最小二乘問題。令fi(θ)=z(i)-y(i),則式(5)可表示為:
(6)

假設(shè)f(θ)具有連續(xù)的二階偏導(dǎo)數(shù),則f(θ)在θ附近的Taylor展開可表示為:
f(θ+Δθ)=f(θ)+s(θ)Δθ+O(‖Δθ‖2)≈
f(θ)+s(θ)Δθ=l(Δθ)
(7)
式中:s(θ)為Jacobian矩陣。
(8)
將式(7)代入式(6),可得:
(9)
sT(θ)s(θ)Δθ=-sT(θ)f(θ)
(10)
當(dāng)sT(θ)s(θ)為正定矩陣時(shí),求解式(10)可得經(jīng)典Guass-Newton方法迭代步長(zhǎng):
(11)
當(dāng)s(θ)Ts(θ)為半正定矩陣時(shí),為使式(10)有解,采用阻尼Guass-Newton方法可得:
(12)
式中:μ>0為阻尼系數(shù)。

一般情況下,對(duì)于算法的每一步迭代,希望在保證算法函數(shù)值有一定下降量的情況下,步長(zhǎng)盡可能大,以便盡快接近最優(yōu)點(diǎn)。因此,μ的取值非常關(guān)鍵。為解決μ的取值問題,本文采用Levenberg-Marquarat(LM)算法解決代價(jià)函數(shù)的極小化問題。LM算法結(jié)合了Guass-Newton算法和梯度下降法的優(yōu)點(diǎn)[5],可較好地解決非線性最小二乘問題,被廣泛應(yīng)用于各類最優(yōu)化問題的求解[6-9]。在LM算法中,(k+1)次迭代的μ值取決于k次迭代和(k-1)次迭代J(θk)和J(θk-1)的值,即:
(13)
式中:λ>1為增長(zhǎng)因子,一般取λ=2或10。

(14)
由上述參數(shù)迭代過程可見,采用式(14)估計(jì)二階系統(tǒng)未知參數(shù)時(shí),需要設(shè)置參數(shù)初值。由于非線性最小二乘法為局部收斂,參數(shù)初值會(huì)直接影響算法的收斂,因此有必要考慮參數(shù)初值的估計(jì)問題[5]。
1.2 參數(shù)初值估計(jì)
為確定待辨識(shí)參數(shù)初值,本文采用兩點(diǎn)法計(jì)算二階系統(tǒng)參數(shù)[10]。該方法選取系統(tǒng)階躍響應(yīng)(2)中的兩個(gè)典型點(diǎn),通過聯(lián)立方程組計(jì)算T1和T2的值。
對(duì)于二階過阻尼系統(tǒng)單位階躍響應(yīng)曲線,一般取y(t1)=0.4和y(t2)=0.8兩個(gè)點(diǎn)作為典型點(diǎn)。將這兩點(diǎn)代入式(2),可得方程組:
(15)
該方程組的近似解為:
(16)
通過求解上式可得T1和T2的估計(jì)值。在求解過程中,對(duì)于二階系統(tǒng),t1和t2應(yīng)滿足關(guān)系[10]:
(17)
綜上所述,本文提出的采用LM算法對(duì)二階過阻尼系統(tǒng)進(jìn)行參數(shù)辨識(shí)的方法步驟如下。
(2) 參數(shù)初值估計(jì)。取z2(tk)在0.4和0.8位置附近滿足式(17)的時(shí)間t1和t2,代入式(16),求出T1和T2作為參數(shù)θ的初值,即θ0=[T1,T2]T。
(3) 設(shè)置阻尼系數(shù)初值μ0、增長(zhǎng)因子λ>1和迭代次數(shù)kmax。其中,本文取λ=10。
(4) 分別采用式(8)和式(12)計(jì)算sk(θ)和Δθk。
2仿真結(jié)果與分析
為檢驗(yàn)本文所提出二階過阻尼系統(tǒng)參數(shù)辨識(shí)方法的有效性,對(duì)以下典型二階過阻尼系統(tǒng)進(jìn)行參數(shù)辨識(shí)。
(1) 直流電機(jī)模型參數(shù)辨識(shí)
直流電動(dòng)機(jī)的數(shù)學(xué)模型可表示[11]:
(18)
式中:Tm和Tl分別為機(jī)電時(shí)間常數(shù)和電磁時(shí)間常數(shù);Ce為直流電機(jī)在額定磁通下的電動(dòng)勢(shì)系數(shù)。試驗(yàn)中,模型取Ce=0.192 5,Tm=0.075,Tl=0.017,迭代次數(shù)kmax=20。參數(shù)辨識(shí)結(jié)果如表1和圖1所示。其中,表1為根據(jù)歸一化后直流電機(jī)階躍響應(yīng)得到的參數(shù)辨識(shí)結(jié)果。圖1為根據(jù)含有觀測(cè)噪聲數(shù)據(jù)辨識(shí)得到的系統(tǒng)模型與真實(shí)模型階躍響應(yīng)的比較結(jié)果。
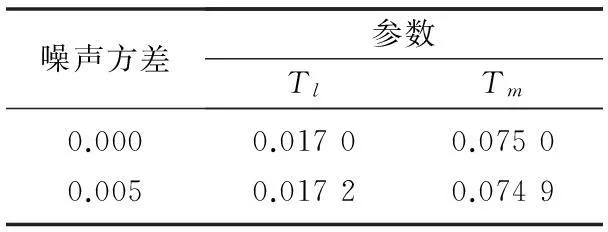
表1 參數(shù)辨識(shí)結(jié)果
由試驗(yàn)結(jié)果可見,當(dāng)無觀測(cè)噪聲時(shí),采用直流電機(jī)階躍響應(yīng)數(shù)據(jù)可準(zhǔn)確辨識(shí)出電機(jī)電磁時(shí)間常數(shù)和機(jī)電時(shí)間常數(shù)。當(dāng)觀測(cè)數(shù)據(jù)含有噪聲時(shí),本文提出的算法依然可以較好地估計(jì)出電機(jī)時(shí)間常數(shù),具有較高的參數(shù)估計(jì)精度。
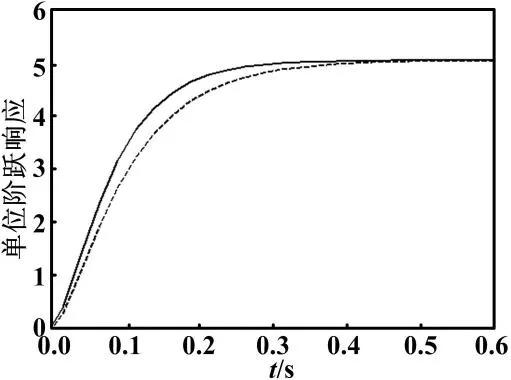
圖1 直流電機(jī)單位階躍響應(yīng)
(2) 雙慣性系統(tǒng)參數(shù)辨識(shí)
試驗(yàn)采用式(1)所示的雙慣性系統(tǒng)作為二階過阻尼系統(tǒng)。試驗(yàn)中,取T1=11,T2=3,kmax=20。采用單位階躍響應(yīng)數(shù)據(jù)得到的參數(shù)估計(jì)結(jié)果如表2所示,辨識(shí)模型與真實(shí)模型階躍響應(yīng)的比較結(jié)果如圖2所示。
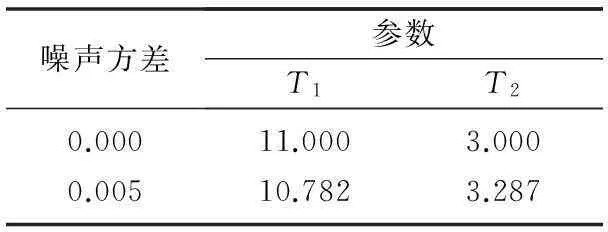
表2 參數(shù)估計(jì)結(jié)果
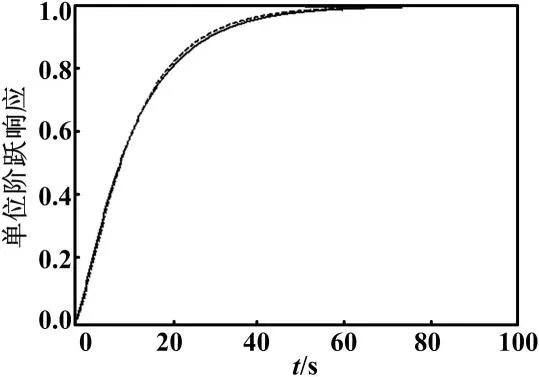
圖2 雙慣性系統(tǒng)單位階躍響應(yīng)
由試驗(yàn)結(jié)果表2和圖2可見,采用本文提出的方法可有效估計(jì)出具有較大時(shí)間常數(shù)的過阻尼系統(tǒng)參數(shù)。
雖然在含有觀測(cè)噪聲時(shí)系統(tǒng)參數(shù)的估計(jì)精度略低于無觀測(cè)噪聲時(shí)的情況,但辨識(shí)得到的系統(tǒng)模型依然具有較好的階躍響應(yīng)擬合精度。綜上所述,本文提出的方法可根據(jù)系統(tǒng)單位階躍響應(yīng)有效估計(jì)出二階過阻尼系統(tǒng)參數(shù),適用于工業(yè)系統(tǒng)建模。
3結(jié)束語(yǔ)
本文提出的參數(shù)辨識(shí)方法是將二階系統(tǒng)參數(shù)辨識(shí)問題轉(zhuǎn)換為系統(tǒng)階躍響應(yīng)數(shù)據(jù)的非線性函數(shù)擬合問題,通過采用LM算法可有效解決參數(shù)估計(jì)中的非線性最小二乘問題。該方法適用于過程控制系統(tǒng)或無法實(shí)現(xiàn)頻繁啟動(dòng)的控制系統(tǒng)的模型辨識(shí)。由算法推導(dǎo)過程可見,該方法同樣適用于一階和二階欠阻尼系統(tǒng)的參數(shù)估計(jì)問題。在給定參數(shù)初值的情況下,該方法同樣適用于多變量系統(tǒng)的參數(shù)辨識(shí)問題。另外,提出的方法實(shí)現(xiàn)簡(jiǎn)單,適用性強(qiáng),便于工程應(yīng)用。
參考文獻(xiàn)
[1] 胡鋼墩,李發(fā)澤.慣性系統(tǒng)的時(shí)域在線辨識(shí)[J].控制與決策,2010,25(1):133-136.
[2] 嚴(yán)德昆.二階過阻尼系統(tǒng)傳遞函數(shù)辨識(shí)的新方法[J].控制理論與應(yīng)用,2001,18(4):638-640.
[3] Bajarangbali,Somanath M.Relay based identification of systems[J].International Journal of Scientific & Engineering Research,2012,3(6):1-4.
[4] Soltesz K,Hagglund T,Astrom K J.Transfer function parameter identification by modified relay feedback[C]//Proceedings of the American Control Conference,2010:2164-2169.
[5] 張光澄,王文娟,韓會(huì)磊.非線性最優(yōu)化計(jì)算方法[M].北京:高等教育出版社,2005:146-168.
[6] Fan J.The modified Levenberg-Marquardt method for nonlinear equations with cubic convergence[J].Mathematics of Computation,2012,81(277):447-466.
[7] Sugihara T.Solvability-unconcerned inverse kinematics by the Levenberg-Marquardt method[J].IEEE Transactions on Robotics,2011,27(5):984-991.
[8] Chan K Y,Dillon T S,Singh J,et al.Neural-network-based models for short-term traffic flow forecasting using a hybrid exponential smoothing and Levenberg-Marquardt algorithm[J].IEEE Transactions on Intelligent Transportation Systems,2012,13(2):644-654.
[9] Kleefeld A,Reiβel M.The Levenberg-Marquardt method applied to a parameter estimation problem arising from electrical resistivity tomography[J].Applied Mathematics and Computation,2011,217(9):4490-4501.
[10]黃德先,王京春,金以慧.過程控制系統(tǒng)[M].北京:清華大學(xué)出版社,2011:39-44.
[11]阮毅,陳伯時(shí).電力拖動(dòng)自動(dòng)控制系統(tǒng)-運(yùn)動(dòng)控制系統(tǒng)[M].4版.北京:機(jī)械工業(yè)出版社,2010:26-29.
中圖分類號(hào):TP273
文獻(xiàn)標(biāo)志碼:A
DOI:10.16086/j.cnki.issn1000-0380.201507024
山東省自然科學(xué)基金資助項(xiàng)目(編號(hào):ZR2011FQ022、ZR2012FQ018);
中國(guó)科學(xué)院自動(dòng)化研究所開放課題資助項(xiàng)目(編號(hào):20140109)。
修改稿收到日期:2015-01-16。
第一作者李敏花(1981-),女,2009年畢業(yè)于中國(guó)科學(xué)院自動(dòng)化研究所模式識(shí)別與智能系統(tǒng)專業(yè),獲博士學(xué)位,副教授;主要從事機(jī)器人控制、圖像處理、機(jī)器視覺等方面的研究。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
