雙速制聲自導魚雷射擊提前角及主動聲自導開機時機研究
2015-03-12 03:39:32胡宏燦林宗祥
艦船科學技術 2015年10期
胡宏燦,周 明,寇 祝,林宗祥
(1.海軍大連艦艇學院 航海系,遼寧大連116018;2.海軍大連艦艇學院水武與防化系,遼寧大連116018)
0 引言
變速是當前新一代輕型智能聲自導魚雷的一大技術特點,在攻潛彈道的不同階段合理使用魚雷速度配置策略和主動聲自導裝置開機時機,可有效增加魚雷總航程、突出魚雷攻潛隱蔽性和命中目標的突發性,變速功能為魚雷的作戰使用提供了更加靈活的使用方式[1]。反潛彈道魚雷速度的變化使得魚雷總航程、彈道平均速度、魚雷輻射噪聲、聲自導作用距離不再是恒值,針對單速制魚雷建立的發射諸元解算模型已不再適用變速制魚雷。本文在分析魚雷變速時機和提前角關系的基礎上,著重研究魚雷發射提前角與魚雷變速時機計算模型和主動聲自導裝置開機時機計算模型。
1 雙速制聲自導魚雷射擊提前角及主動聲自導裝置開機時機問題分析
1.1 魚雷發射有利提前角原理及雙速制魚雷基本變速原則
根據魚雷反潛基礎理論,在特定陣位態勢,射擊條件確定的情況下能夠使魚雷最大程度的遮蓋目標散布的魚雷發射角度,稱為魚雷發射有利提前角[2-3]。有利提前角是敵潛艇舷角、射擊距離、敵潛艇航速、魚雷航速、魚雷自導扇面開角的函數,是魚雷反潛重要發射參數之一,顯然,雙速制魚雷有利提前角的計算決定于魚雷直航搜索彈道的平均速度,而平均速度的計算前提條件就是魚雷速度配置策略[4]。為了減小潛艇探測到來襲魚雷時雷目距離、增加魚雷總航程,雙速制魚雷在直航搜索階段的速度配置原則應為:低速搜索捕獲目標,高速跟蹤摧毀目標。在此速度配置原則的指導下,魚雷利用低速接近目標,可有效減小自身輻射噪聲,增加魚雷自導作用距離,同時由于魚雷自身輻射噪聲的降低,也縮短了敵潛艇魚雷報警距離,增加了魚雷攻擊的隱蔽性;當雷目距離達到某個閥值時、或魚雷捕獲到目標時,立即轉為高速航行,以保證對目標的持續跟蹤直至命中,以上即為雙速制聲自導魚雷直航階段速度配置基本策略[5-6],攻潛陣位態勢如圖1所示。
1.2 直航搜索階段存在變速時魚雷射擊有利提前角特點分析
假設魚雷低速航行速度為Vd節,高速為Vg節,當魚雷直航階段使用單一航速搜索時,使用單速制魚雷有利提前角計算方法可分別求出全程低速和全程高速對應的有利提前角,分別記為φa1和φa2;如果直航段使用了變速策略,那么無論何時變速,有利提前角將落在φa1~φa2之間,并且,提前角隨著變速時機的提前而減小,如圖2所示。以上分析表明,在特定陣位態勢下,雙速制魚雷有利提前角的計算決定于魚雷直航搜索階段的變速策略,不同的變速策略對應不同的有利提前角,在全程高速和全程低速2個極端情況下確定的角度范圍內,每個提前角與直航段的特定魚雷平均速度相對應,而每個平均速度與一個魚雷變速時機相對應。綜上可知,雙速制魚雷可根據戰位條件選擇某個提前角發射,提前角選定以后,問題將轉化為雙速制魚雷直航搜索段變速時機計算問題。
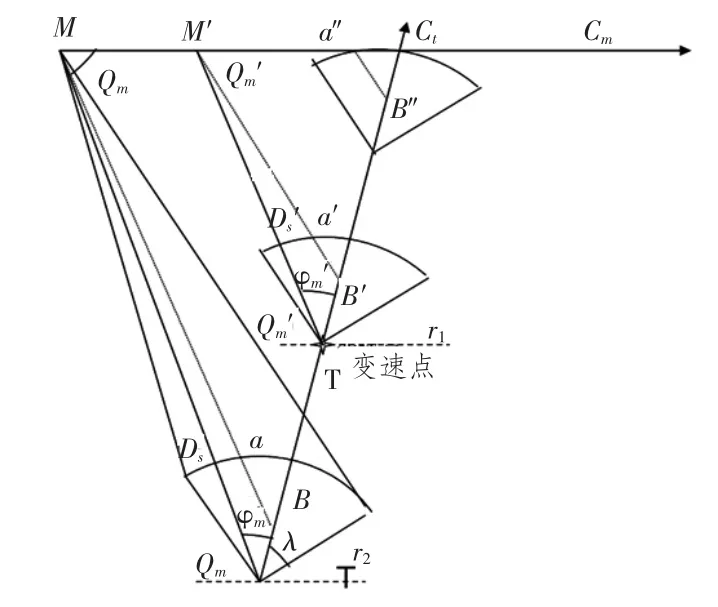
圖1 雙速制魚雷攻潛態勢圖Fig.1 The anti-sub operational picture of dual-speed torpedo

圖2 雙速制魚雷提前角范圍示意圖Fig.2 The diagram of the range of advance angle of dual-speed torpedo

圖3 單速制魚雷提前角計算陣位圖Fig.3 The position diagram of calculation of advance angle of single-speed torpedo
1.3 主動聲自導裝置開機條件
潛艇魚雷報警聲吶靠檢測魚雷聲自導尋的信號和魚雷輻射噪聲探測來襲魚雷,一般而言,魚雷自導信號聲源級高于魚雷輻射噪聲,如果魚雷主動聲自導開機過早,將增大被潛艇早期發現的概率,使得魚雷喪失攻潛的隱蔽性;魚雷主動自導開機過晚,會使魚雷自導裝置開機時已經越過目標航跡線,導致魚雷不能捕獲目標[7-8]。理想情況是主動聲自導裝置開機剛好能夠捕獲到目標,也即魚雷與目標潛艇距離等于魚雷自導作用距離時即為主動聲自導開機計算條件。顯然,雷目實時距離決定了自導裝置開機時機,而雷目實時距離又決定于初始陣位和魚雷發射提前角,發射提前角又決定于魚雷的變速時機,建模時應該統一考量。
2 模型構建
2.1 雙速制魚雷有利提前角計算模型
2.1.1 雙速制魚雷有利提前角范圍計算模型
在特定陣位態勢下,雙速制魚雷發射提前角范圍可使用單速制魚雷提前角計算模型求取,假設雙速制魚雷低速為Vd,魚雷低速自導作用距離為r1,魚雷高速為Vg,魚雷高速自導作用距離r2,魚雷自導扇面半角為λ,實施反潛攻擊時,敵潛艇航速為Vm,射距為D,敵舷角為Qm,以魚雷目標相對移動線平分極限角為條件,由圖3單速制聲自導魚雷反潛陣位態勢圖幾何關系可建立魚雷有利提前角計算模型:
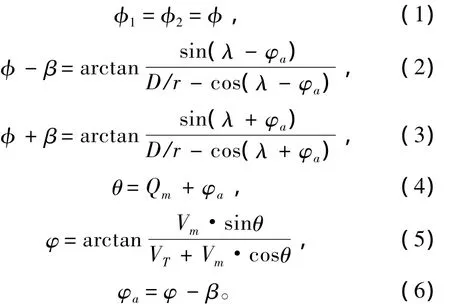
式中:Ф1與Ф2為魚雷和目標相對移動線平分魚雷自導扇面極限角的角度值;β為雷目連線和魚雷扇面中心目標連線之間的夾角;θ為魚雷航向與目標航向之間的夾角;
分別使用魚雷高速和低速技術戰術指標參數代入式(1)~式(6),使用解析迭代法可分別求出全程高速和全程低速分別對應的提前角φa1與φa2[2]。
2.1.2 提前角對應的魚雷變速時機計算模型
以目標潛艇位置為原點,潛艇航向為X軸,建立笛卡爾坐標系,如圖1所示,則潛艇的實時位置可表示為:

式中:Xm為t時刻潛艇橫坐標;Ym為t時刻潛艇縱坐標。
根據陣位條件,設魚雷發射提前角選定為φa∈[φa1,φa2],變速前魚雷實時位置坐標:

式中:XT為t時刻魚雷橫坐標;YT為t時刻魚雷縱坐標。
提前角為φa時,設對應的變速時刻為t1,則t1時刻的魚雷位置T'坐標:

t1時刻的目標位置M'坐標:

t1時刻雷目相距距離:

t1時刻敵舷角為:

t1時刻后,魚雷將以高速航行。在t1時刻,目標、魚雷形成一個新的陣位關系,在此新的陣位關系下,以魚雷高速技戰術指標代入式(1)-式(6),可解算出此陣位關系下的提前角φ'a。為了保證魚雷變速前后航向不變,由圖1幾何關系可知,必須滿足以下關系式:

式(13)即為在魚雷提前角為φa時變速時機計算的約束條件。
2.2 聲自導裝置開機時機計算模型
根據魚雷技術參數可知,魚雷自導作用距離遠小于敵潛艇魚雷報警距離,以魚雷自導開機時雷目距離剛好等于魚雷自導作用距離為計算條件,則開機時機將包括魚雷低速航行時間加上變速后高速航行的一段時間,提前角、低速航行時間計算出后,設魚雷高速航行t'時刻后,魚雷自導開機,則有:

魚雷主動聲自導開機時機:

2.3 模型迭代求解步驟
根據式(1)~式(6)解出提前角區間范圍[φa1,φa2],然后讓提前角 φa在區間[φa1,φa2]內變化遍歷,仿真步長設為0.2°;在每一個提前角下,變速時刻t1從0開始變化,仿真步長設為10 s,針對每組提前角和變速時刻,求解Qm+φa-Q'm-φ'a的值,直到此值小于一個閥值為止,則此時對應的t1就為當前提前角下魚雷應該低速航行時間,也即在特定提前角φa下魚雷變速時機。變速時機解出后,利用式(14)和式(15)即可解出主動聲自導裝置開機時間,解算流程如圖4所示。

圖4 特定提前角下魚雷變速時機計算仿真流程圖Fig.4 The simulating flow chart of opportune moment of speed changing at particular advance angle
3 仿真數據分析
3.1 計算結果
在射距DS=10 000 m,敵舷角Qm=45°,魚雷低速Vd=36 kn,魚雷自導作用距離r1=2 000 m,魚雷高速Vg=45 kn,魚雷自導扇面半角λ=45°,敵航速Vm=12 kn的情況下,仿真計算結果如表1所示。

表1 仿真結果Tab.1 Result of simulation
3.2 數據分析
在以上戰位態勢和魚雷技術參數條件下,可選擇的魚雷發射角度范圍為9.7°-11.7°,仿真時提前角以0.2°步進,使用迭代的方法,時間步長設置為10 s,可計算出每個提前角下魚雷低速航行時間,也即變速時機。仿真數據表明,變速時機提前,對應的發射提前角小,主動聲自導裝置開機時間早,結論符合魚雷射擊基本理論。
3.3 提前角選擇一般規律
在魚雷技戰術指標一定、陣位態勢確定的情況下,魚雷發射提前角的選擇涉及到魚雷變速具體策略,變速策略的制定需要考慮潛艇水聲對抗、機動原則和魚雷再搜索彈道等具體問題,這里僅就提前角選擇的一般規律做個分析。根據反潛理論,當使用較小提前角發射時 (意味著魚雷變速時機早),魚雷接敵敵速度快,由于目標運動要素測量誤差引起的目標散布區域較小,魚雷自導扇面遮蓋目標散布區域大,有利于捕獲概率的提高;但是考慮到目前潛艇都有完善的水聲對抗措施,由于潛艇魚雷報警距離遠大于魚雷自導作用距離,所以潛艇在魚雷發現自己之前會先發現來襲魚雷,提前做出相應的對抗,這樣一來,在雷目預定相遇點捕獲到目標的概率會降低,在這種情況下為了提高命中概率,魚雷需要留有較大的剩余航程才能實施再搜索彈道、反對水聲抗措施,所以從最大限度的保留剩余航程考慮,又要求魚雷變速時機越晚越好。綜上分析可知,提前角的選擇在考慮雷目預定相遇點捕獲概率的同時,還要兼顧剩余航程的保留,這一戰術博弈問題還需要進一步深入研究。
4 結語
本文從雙速制魚雷攻潛特點分析入手,論證了提前角和變速時機的關系,提出了多速制魚雷有利提前角范圍的概念,這一概念的提出增加了水面艦艇攻潛戰術使用的靈活性;建立了雙速制魚雷提前角和變速時刻計算模型和主動聲自導裝置開機時間計算模型,在特定戰場態勢下進行了仿真計算,結果表明此方法概念清晰,計算簡單,結論合理可信,為雙速制聲自導魚雷有利提前角和主動聲自導裝置開機時機的計算做了有益的探討,文中提到的方法和思路對多速制魚雷提前角及變速時機計算問題也有一定的借鑒作用。
[1] 崔緒生.國外魚雷技術進展綜述[J].魚雷技術,2003,11(3):18-22.CUI Xu-sheng.A summary of progress in torpedo technology over the world[J].Torpedo Technology,2003,11(3):18 -22.
[2] 孟慶玉,張靜遠,等 魚雷作戰效能分析[M].北京:國防工業出版社,2005.MENG Qing-yu,ZHANG Jing-yuan,et al.Analysis of operational effectiveness for torpedo[M].Beijing:National Defence Industry Press,2005.
[3] 賈躍,李鐵,李文哲.反潛理論基礎[M].大連:海軍大連艦艇學院,2007.JIA Yue,LI Tie,LI Wen-zhe.The principle theory of Antisubmarine[M].Dalian:Dalian Naval Academy Press,2007.
[4] 曹震卿.某型輕型魚雷彈道規劃研究[D].大連:海軍大連艦艇學院,2011.CAO Zhen-qing.Study on trajectory planning for a certain torpedo[D].Dalian:Dalian Naval Academy,2011.
[5] 趙正業.潛艇魚雷攻擊[M].北京:海軍司令部,1993.ZHAO Zheng-ye.Submarione torpedo attack[M].Beijing:Navy Headquarters,1993.
[6] 吳和聲,徐杏欽.高科技背景下的魚雷武器[J].魚雷技術,2003,11(3):12-18.WU He-sheng,XU Xin-qin.The development of torped weapon using high technology[J].Torpedo Technology,2003,11(3):12 -18.
[7] 周濤.聲自導魚雷自導開機距離計算模型研究[J].指揮控制與仿真,2013,35(3):36 -39.ZHOU Tao.Research on model of torpedo initiative acoutic homing equipment start-up distance[J].Command Control& Simulation,2013,35(3):36 -39.
[8] 張宇文.魚雷彈道與彈道設計[M].西安:西北工業大學出版社,1999.ZHANG Yu-wen.The torpedo trajectory and ballistic design[M].Xi'an:Northwestern Polytechnical University Press,1999.
