TinyOS環境下交通信息采集自組網系統設計**國家自然科學基金資助項目(編號:50878088);廣東省高等學校學科建設專項項目(編號:2013WYXM0133);廣東省高等學校優秀青年教師培養計劃資助項目(編號:Yq2013180)。
2015-03-12 02:05:41曹成濤廣東交通職業技術學院智能交通工程技術應用中心廣東廣州510650
機電工程技術 2015年11期
曹成濤(廣東交通職業技術學院智能交通工程技術應用中心,廣東廣州 510650)
?
TinyOS環境下交通信息采集自組網系統設計**國家自然科學基金資助項目(編號:50878088);廣東省高等學校學科建設專項項目(編號:2013WYXM0133);廣東省高等學校優秀青年教師培養計劃資助項目(編號:Yq2013180)。
曹成濤
(廣東交通職業技術學院智能交通工程技術應用中心,廣東廣州510650)
摘要:針對傳統交通信息采集的弊端,基于IEEE 802.11p標準,利用ARM3000平臺提出了一種TinyOS環境下交通信息采集自組網系統方案,給出了系統的整體框架結構,詳細介紹了TinyOS環境下交通信息采集自組網系統的MAC層、路由層和應用層的設計方法,給出了自組網系統中傳感節點、匯聚節點、管理節點的軟件工作流程。以通用城市交叉口為例,從檢測數據的可靠性、時延、傳輸距離等3個方面對系統進行了測試,結果表明,該方案穩定可靠,對進一步開發相關的實用系統具有參考意義。關鍵詞:交通信息采集;TinyOS;自組網方案;傳感器節點
0 引言
交通信息采集是實現智能交通控制與交通誘導的前提,一直是智能交通領域研究的熱點之一。目前廣泛應用的線圈、壓電等交通檢測器以有線接入為主,在傳感器至信號處理器之間需要大量電纜。這種方式存在著明顯不足,需要在交叉口或高速公路沿線布設大量的信號傳輸線和電源線,導致系統建造、安裝、維護復雜,設施擴建更新困難、設施環境信息檢測靈活性差,信息檢測在空間位置上無法隨時調整,不能適應新時期交通信息采集對時空參數即時性的要求。傳統的以總線方式設計的交通信息采集傳感器網絡需要人工進行精確的線路布設和節點管理,而且節點的體積較大、耗能較高。人們布設傳感器網絡是為了獲得每個節點的信息,沒有注重節點之間的協同工作,導致網絡功能單一、測量精度不高、覆蓋范圍較小。
無線傳感器網絡(Wireless Sensor Network)的出現,較好的解決了傳統交通信息采集方式難以更新、擴容的問題[1]。交通信息采集自組網是無線傳感網在智能交通領域的一個主要應用,可實現人、車、路的互相感知,有極大的應用前景和發展潛力。交通信息采集自組網能否在現實中取得應用,關鍵在于系統的自組網路由協議能否滿足交通信息采集實時性的需要。金純[2]等基于IEEE 802.11p標準,對車路互聯網中RSU(路邊單元)和OBU(車載單元)之間的通信進行了仿真和分析。何鵬[3]等提出一種拓撲相對穩定的車輛分簇算法和基于分簇的多信道混合型MAC協議,并通過模擬仿真證明了算法的有效性。Kara?giannis G[4]等對車路協同的系統架構、搭建方法方面進行了研究,李建坡[5]等建立了一種無線傳感網路由算法。綜上,國內外學者在交通信息采集自組網傳輸機制和傳輸標準等方面進行了有益的研究,但多數集中在理論仿真,交通信息采集自組網的實際應用仍處在探索階段[6]。
本文基于IEEE 802.11p標準,利用ARM3000平臺提出了一種TinyOS環境下交通信息采集自組網方案,給出了系統的整體框架結構,詳細介紹了TinyOS環境下交通信息采集自組網系統的MAC層、路由層和應用層的設計方法,給出了自組網系統中傳感節點、匯聚節點、管理節點的軟件工作流程。在ARM3000的顯示界面列出所有交通信息采集節點的ID,當選中一個節點時,能夠以曲線圖的方式動態的表示該節點交通流量等交通信息的變化情況。得到節點的RSSI(Received Signal Strength Indicator)值和電池數據后,在ARM平臺上以圖元的方式表示節點電池剩余量和信號強度。這樣用戶就可以掌握節點的電池情況,并及時地更新節點的電池。通過平臺上的LED顯示監測區域內各交叉口的交通流量信息,這樣用戶就可以掌握整個區域內交叉口的交通狀況。當交通流量信息超過設定的閾值時能夠蜂鳴器報警和燈光報警,提示管理者交叉口交通出現異常。以某通用城市交叉口為例,從檢測數據的可靠性、實時性、傳輸距離等3個方面對系統進行了測試,結果表明,該方案通信穩定,丟包率低,該研究對進一步開發相關的實用交通信息采集自組網系統打下了基礎。
1 系統整體結構
系統結構如圖1所示:WSN節點上的地磁傳感器實時檢測所在車道的交通流量、車速、RSSI值和節點能源狀況等相關數據,然后節點通過無線網絡將數據發送到ARM3000平臺上的Sink節點。Sink節點通過串口與ARM平臺通信。在ARM平臺的用戶終端上,通過LCD等方式向用戶提供交叉口的交通信息。用戶通過ARM平臺可以直接向交通信息采集傳感器節點發送控制命令,設定在不同時間段或不同交通情況下的采集頻率、報警值等,從而提高系統的靈活性和減小節點能耗。例如,當把系統應用到一個新的交叉口時,針對交叉口交通量狀況,可以相應的調整設定不同的交通流量報警閥值。將ARM3000平臺接入Internet網或局域網,讓ARM平臺起網關的作用。通過TCP/IP協議,可以把無線網絡中采集到的數據傳輸到交通信息中心服務器上,為實現區域交通綠波控制或智能誘導提供基礎數據。
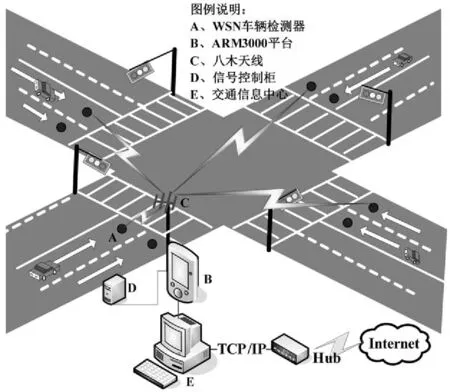
圖1 交通信息采集自組網系統結構圖
2 方案設計與實現
本設計中WSN交通信息采集節點采用美國加州大學伯克利分校提出的Mica2型號節點改進而成,由于傳感器維護會對交通造成影響,因此需選用低功耗穩定的處理器芯片,以延長交通信息采集節點的使用壽命。處理采用ATME的8位低功耗單片機Atmega128L,無線傳輸單元采用TI公司的低功耗無線收發模塊CC2530,采用ISM短距離通訊工作頻帶在915 MHz。傳感采集單元采用地磁傳感器HMC1021,電源模塊采用普通紐扣電池。此外,利用Atmega128L自帶的ADC電路獲取工作電壓值,可以換算電池的剩余能量,以及信號強度值RSSI。WSN交通信息采集節點組成如圖2所示。
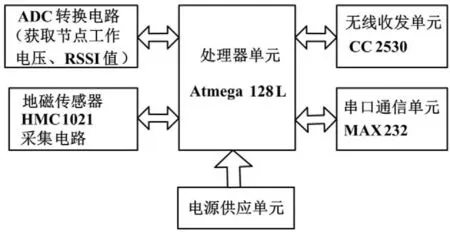
圖2 WSN交通信息采集節點
2.1Mac層設計
目前交通自組網普遍采用IEEE 802.11p標準,筆者基于此標準在TinyOS環境下設計了自組網的Mac層。Mac層主要由7個組件完成,并提供相應的接口給高層使用。MAC層7個組件的關系如圖3所示。
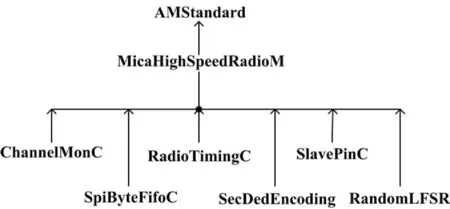
圖3 交通信息采集自組網Mac層組件關系圖
(1)AMStandard是活動消息(AM)層的標準組件。
(2)MicaHighSpeedRadioM是協議棧的控制中心,它通過調用底層的組件間接地和硬件通信。
(3)ChannelMonC是負責信道檢查的組件。當檢測到信道處于空閑時,它就會通知高層的組件。
(4)SpiByteFifoC使用Atmega128L的SPI,負責一位一位的接收或發送廣播數據。
(5)RadioTimingC組件通過調用單片機里硬件計數器的值,產生一個用于收發雙方同步的時間值。
(6)SecDedEncoding組件負責對字節進行編碼和譯碼。
(7)SlavePinC組件調用硬件抽象層(HPL)函數操作硬件引腳。
(8)RandomLFSR組件用于獲得一個隨機數,以決定當檢測到碰撞時,當前節點等待廣播信道的時間。
下面介紹MAC層發送、接收數據的過程:當節點要發送一個數據幀時,要先等待一段隨機時間,檢測信道是否處于空閑狀態。如果信道處于空閑狀態,接著就發送12個字節的數據幀開始標志,然后就可以發送數據了。發送完數據后,節點就進入了等待ACK幀狀態。其實,在廣播棧初始化之后,節點在Mac層就一直處于監聽信道的狀態。如果接收到了數據幀的開始標志,那么Mac層就知道了,接下來接收的就是真正需要的數據幀了。節點在接收完一個數據幀之后,必須發送一個確認幀,通知發送方“我已經收到數據”。
2.2路由層設計
TinyOS中將所有通信數據都封裝為活動消息(Active Message)。活動消息(AM)的定義如圖4。

圖4 AM消息結構
目的節點地址addr是消息發往的節點ID。
(1)消息句柄type將在接收節點中調用,可以把句柄ID看作是一個在消息頭部中的整數或“端口號”。
(2)消息組group是規定只有在同一個組下的節點能夠通信,默認為0x7E。
(3)數據段字節數length是數據段的字節數目。
(4)數據段data最大允許長度為29字節。
(5)crc校驗字段是從addr到data字段的校驗值。
(6)ack字段為1表示消息成功發送;為0表示消息沒有成功發送。
路由層的定義是實現多條路由的關鍵。路由層定義如圖5。

圖5 路由層數據格式
節點的路由狀態廣播包括節點自己的ID號、到匯聚節點的跳數、路由狀態廣播消息的編號以及到鄰居節點的鏈路評估信息等。由于前3項都在路由層定義了,所以在路由分組中不需要再定義了。路由狀態分組格式如圖6所示。
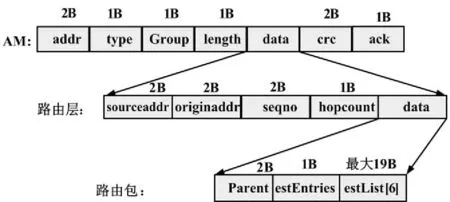
圖6 路由狀態分組格式
節點就是通過在estList表中查找節點ID號是自己的表項,再把receiveEst填寫到路由表中發送路由狀態包的節點表項的sendEst。節點接收到鄰居節點的路由狀態分組之后,就保存在自己的路由表中。
2.3應用層設計
根據規范和設計要求,軸系相鄰法蘭上的偏移值δ和曲折值Φ為:δ≤0.10 mm,Φ≤0.10 mm/m。從表1和表2可知,兩組法蘭上的偏移值和曲折值滿足設計和規范要求。
從WSN交通信息采集節點匯聚到Sink節點的數據包只有兩種類型,一種是包含各車道交通流量、車速信息的FSMsg數據包,另一種是包含節點RSSI值和工作電壓的RBMsg數據包。通過多跳路由協議就可以將網絡內所有節點的數據匯聚到Sink節點。
根據上層消息結構的分析,應用層最大允許長度為22字節。消息結構如圖7。
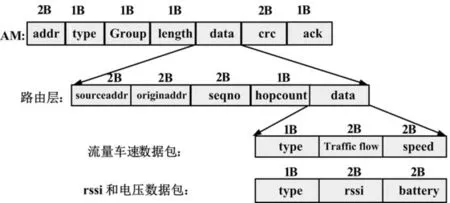
圖7 應用層數據包結構圖
從Sink節點發送往WSN交通信息采集節點的命令數據包主要包括交通信息采集頻率采、異常報警閾值。由于從Sink節點往信息采集節點發送命令數據比較少,所以采用了廣播的方式將命令發送到網絡內的所有節點上。
3 節點軟件實現
3.1交通信息采集傳感節點流程
交通信息采集傳感節點主要負責自主組成網絡、采集數據、上傳數據等功能。傳感器節點的工作流程如圖8所示。
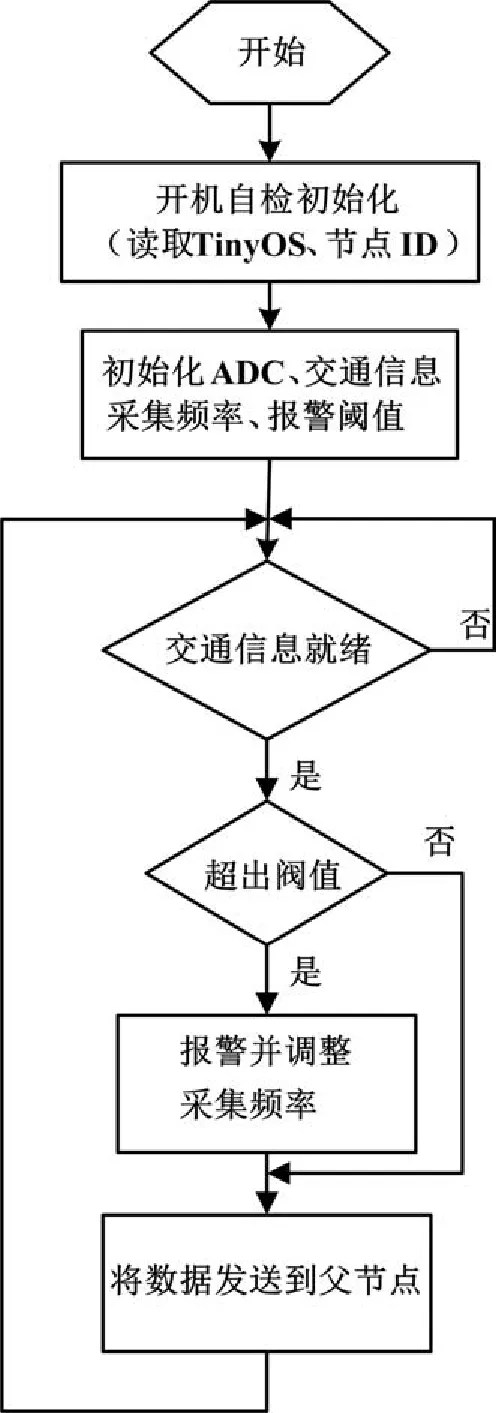
圖8 交通信息采集傳感節點流程圖
3.2交通信息采集Sink節點流程
Sink節點是數據傳輸的樞紐,在系統中充當路由器的作用,實現在兩個網絡間數據轉發。Sink節點的工作流程如圖9所示。
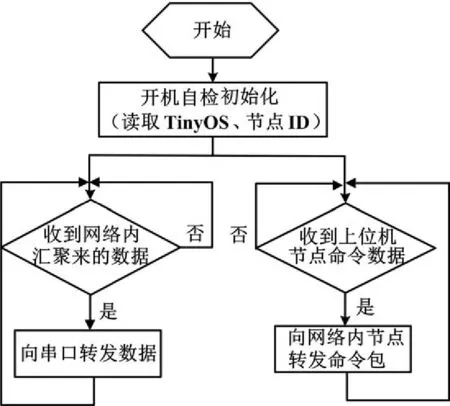
圖9 Sink節點流程圖
ARM3000主要完成提供人機操作界面、接收并處理Sink節點數據、接收用戶輸入節點命令、發送控制命令、超閥值報警等功能。ARM平臺收到Sink節點的數據后,繪制交叉口交通流量變化曲線圖、標示節點的電池剩余量和RSSI值。流程如圖10所示。
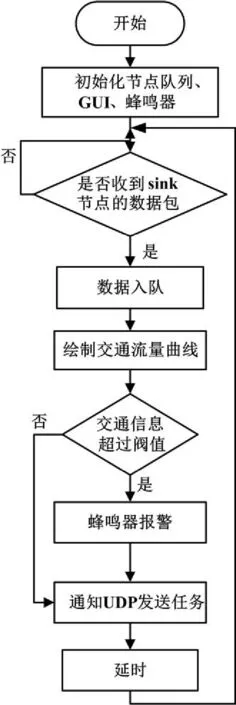
圖10 管理節點流程圖
4 系統測試方案及結果
TinyOS是一種專為嵌入式無線傳感網絡設計的開源操作系統,基于構件的架構使其具有低功耗易實現的特點[7]。在ARM3000平臺上移植TinyOS嵌入式操作系統,利用其多任務、高實時的優勢完成和Sink節點的通訊以及豐富的采集數據顯示方式。因為系統提供了GUI、TCPIP等方面的API。所以筆者的任務就是在這些庫的基礎上直接進行應用程序的開發。
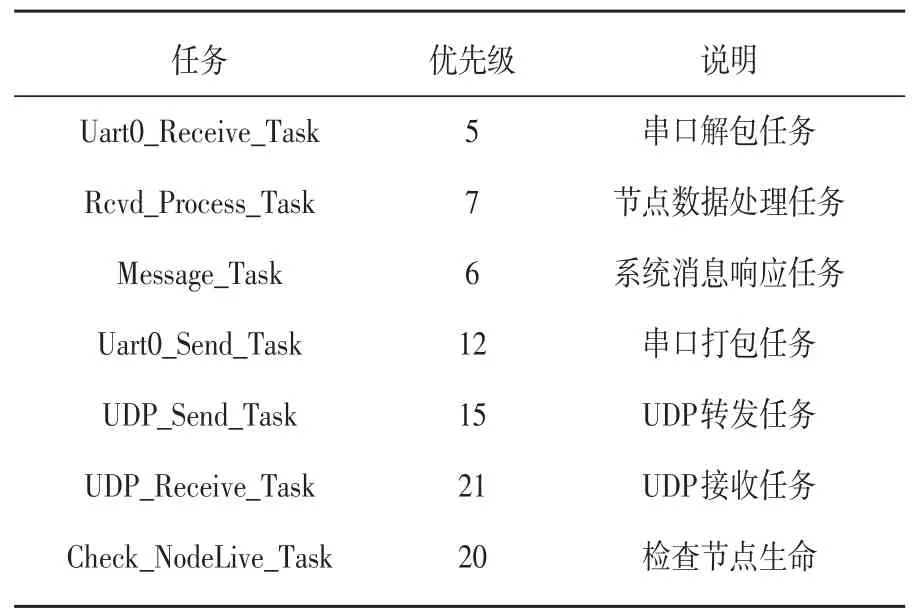
表1 交通信息采集自組網系統任務定義
4.1系統測試任務定義
因為移植TinyOS后,在操作系統啟動時,默認會啟動優先級為1、8、9、10、11、59、62、63的任務。所以在應用程序中,一共定義了7個任務。
Uart0_Receive_Task任務解析Uart0發送過來的Sink節點的數據,然后通過消息隊列的方式通知Rcvd_Process_Task對數據進行處理。Message_Task響應系統默認消息,如鍵盤消息、觸摸屏消息等。Uart0_Send_Task負責將用戶的控制命令發送到Sink節點。UDP_Send_Task將數據轉發到PC服務器。UDP_Receive_Task接受PC服務器的數據,獲得服務器的IP和通信端口號。Check_NodeLive_Task周期性的檢查節點的生命計數器,如果節點死亡,就從節點隊列移出。
4.2系統測試結果
如圖1所示,分別以雙向2車道、4車道、6車道的通用十字形交叉口為例,傳感節點安裝在交叉口進口道停車線前15 m處,對系統進行了測試。
(1)數據可靠性測試
系統啟動后,設置采集間隔為10分鐘,利用手動交通調查儀器統計的交通流量為參照與平臺采集的交通信息采集到的交通信息對比,由表1可知系統采集交通信息誤差最大約為7%。
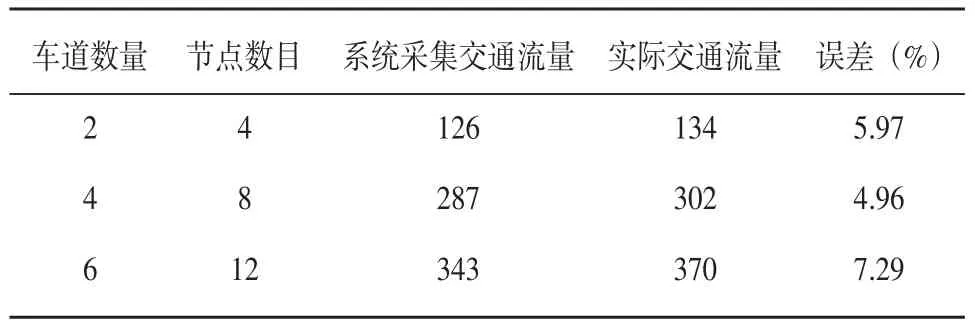
表2 交通信息可靠性列表
(2)數據時延測試
在通用交叉口,系統的時延隨著交通流量的增大和節點的增多呈上升趨勢,但時延通常小于400 ms,可以滿足交叉口信號控制和交通誘導的需求。
(3)傳輸距離測試
交通信息采集傳感節點設置在進口道停車線前15 m處[8],不同進口方向兩個節點間的距離大約28 m,sink節點可以收到兩個節點發送的數據。如傳感節點設置在進口道停車線前20 m、30 m、50 m處,不同進口方向兩個節點間的距離分別為35 m、50 m、77 m,測試表明在節點距離小于50 m時,可以收到節點數據;如節點距離在50~77 m會有找不到節點的情況發生,由于城市交通信號控制檢測點通常小于50 m,可以滿足實際需要。
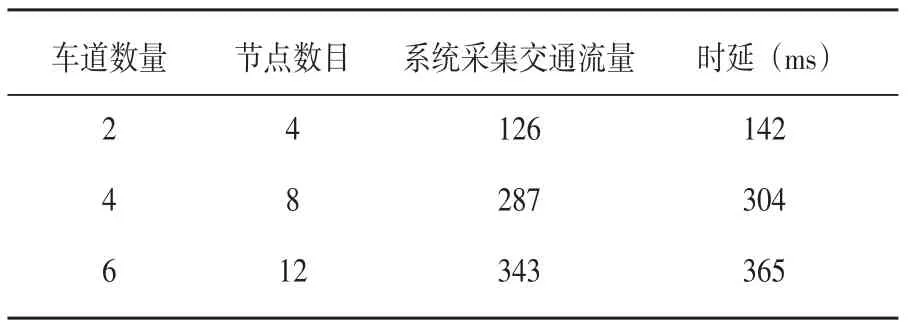
表3 系統數據時延測試列表
5 結論
與傳統的線圈等交通信息采集方式相比,基于無線傳感器網絡(WSN)的交通信息采集有更大的靈活性和方便性,在后期維護、系統布線等方面有著巨大的優勢。本文基于IEEE 802.11p標準,設計的TinyOS環境下交通信息采集自組網方案,具有傳輸數據可靠、時延小、傳輸距離滿足需要等優點,以通用城市交叉口為例,從檢測數據的可靠性、時延、傳輸距離等3個方面對系統進行了測試,結果表明,該方案通信穩定,對進一步開發相關的實用系統具有參考意義。
參考文獻:
[1]羅常.基于RC5加密算法的無線傳感器網絡安全通信協議實現技術[J].機電工程技術,2014(3):15-18.
[2]金純,徐洪剛,魏星,等.基于IEEE 80211p /1609標準的路車互聯網的初步實現[J].計算機應用研究,2011,28(11):4219-4221.
[3]何鵬,閻保平,李志,等. CM-MAC:一種基于分簇的多信道車載網MAC協議[J].計算機研究與發展,2014,51(3):502-510.
[4]G.Karagiannis,O. Altintas,E. Ekici,et al. Vehicular networking:A survey and tutorial on requirements,architectures,challenges,standards and solutions. IEEE Communications Surveys and Tutorials,2011,13(4):584-616.
[5]李建坡,姜雪,朱緒寧.無線傳感器網絡能耗均衡LEACH路由算法[J].自動化儀表,2014,14(9):51-54.
[6]姚佼,楊曉光.車路協同環境下城市交通控制研究[J].上海理工大學學報,2013,35(4):397-403.
[7]裘瑩,李士寧,吳雯,等.通用無線傳感器網絡節點平臺設計[J].計算機工程與應用,2012,48(23):90-94.
[8]楊濤.基于基站切換的交通信息采集技術應用研究[J].現代電子技術,2012,35(15):145-147.
(編輯:阮毅)
坪山將建廣東省機器人產業示范基地
近日,“坪山聚龍智谷”成為廣東省“2015年省市共建戰略性新興產業基地”。根據省一級規劃,機器人產業將成為坪山新區智能制造示范基地的突破口,機器人產業園到2020年底基本建成。
據了解,《廣東省智能制造示范基地產業發展規劃(2015-2017)(機器人產業示范基地·深圳坪山)》近期正式發布,該規劃提出,以打造國際領先、國內一流“機器人產業示范基地”為發展愿景,集聚全球機器人領域的產業資源、科研要素,全力推進新區機器人產業快速健康發展,將新區打造成為全球智造者的天地、機器人的家園、創造家的樂土。
該規劃提出,新區機器人產業園力爭到2017年初見成效,到2020年底基本建成,形成以機器人技術為核心,以重點項目為著眼點推進智能工業機器人全產業鏈結構布局,實現工業產值500億元,力爭實現機器人產業年均增長超過20%。培育集聚10家以上技術引領型的國際知名企業、研究機構,使創新資源和要素實現有效的匯聚和深度的合作,建立比較完善機器人設計、研發、檢測、試驗、驗證、認證認可等服務的公共服務認證檢測體系,組織實施10個以上重大產業化項目,吸引若干機器人領域的兩院院士、千人計劃等高端人才團隊到新區,以各種形式為新區機器人產業發展提供服務,培養、造就一批具有國際影響力的領軍人才,將新區打造成為國際領先的機器人科研創新中心、全球知名的機器人產業集聚基地。
(來源:南方日報)
Design of Traffic Information Collection Ad Hoc Network Based on TinyOS
CAO Cheng-tao
(Intelligent Traffic Engineering Technology Center,Guangdong Communication Polytechnic,Guangzhou510650,China)
Abstract:Aiming at the drawbacks of the traditional traffic information collection,an Ad Hoc Network scheme of traffic information collection based on IEEE 802.11p was proposed by using ARM3000 platform. The structure of the system was introduced. The design method of MAC layer,routing layer and application layer of Ad Hoc Network on tinyos were explained in detail,while the software workflow of sensor node,sink node and management node was given. Taking general city intersection as an example,the system was tested from three aspects of reliability,data delay and transmission distance. It shows that the design scheme proposed is stable and reliable,which has reference significance to develop practical system.
Key words:traffic information;TinyOS;Ad Hoc Network;sensor node
作者簡介:曹成濤,男,1981年生,山東濟寧人,博士,副教授。研究領域:智能交通系統。
收稿日期:2015-07-29
中圖分類號:TP391 U491
文獻標識碼:A
文章編號:1009-9492 ( 2015 ) 11-0001-06
DOI:10. 3969 / j. issn. 1009-9492. 2015. 11. 001
