一種多工位全自動玩具噴涂機的設計
2015-03-12 02:05:47徐小明彭忠凱廣東工業大學機電工程學院廣東廣州510006
機電工程技術 2015年11期
關鍵詞:模塊化
林 敏,徐小明,彭忠凱(廣東工業大學機電工程學院,廣東廣州 510006)
?
一種多工位全自動玩具噴涂機的設計
林敏,徐小明,彭忠凱
(廣東工業大學機電工程學院,廣東廣州510006)
摘要:設計了一種適用于小型塑膠玩具外表面噴涂的多工位全自動噴涂機。首先,詳細闡述了多工位全自動噴涂機的工作原理,接著,對噴涂機的主要結構進行了介紹,包括移動模座、移動模座往復運動系統、噴槍空間運動系統和洗模槍往復運動系統,最后,確定了噴涂機的控制系統。該機能夠實現玩具360°翻轉、多種顏色的噴涂,具有工作可靠、結構模塊化和卸料容易等優點,稍作改造還可適用于其他小型物件的外表面噴涂。
關鍵詞:噴涂;多工位;噴涂機;模塊化
0 引言
塑膠玩具制造過程中,表面裝飾是一道重要的工序,而表面裝飾一般是對塑膠玩具進行噴涂[1]。目前市場上出現了大量的自動化噴涂設備,但都局限于對單個玩具、單種顏色的平面噴涂,產品生產周期長,自動化程度較低。伴隨著玩具種類的增多和工藝復雜性的提升,現有的噴涂設備已經無法滿足行業需求。因此,研制一種用于塑膠玩具表面噴涂的多工位全自動噴涂機,對提升塑膠玩具行業的生產效率、提高產品質量和行業自動化程度十分必要。
本課題研究的基于PLC的塑膠玩具多工位全自動噴涂機,實現了塑膠玩具360°翻轉、多種顏色的噴涂,流水線生產,在單臺玩具噴涂機上完成玩具表面不同位置的噴涂任務,極大的提高了生產效率,降低了生產成本。對于不同的玩具和噴涂工序,只須更換不同的銅模,亦能對其實現自動噴涂。因多工位玩具噴涂機機構模塊化,為了敘述方便,本文以二色塑膠玩具噴涂機(以下簡稱玩具噴涂機)進行說明。
1 玩具噴涂機的工作原理
玩具噴涂機設有五個工位,分別為兩個清洗工位、兩個噴涂工位和一個落料工位,由移動模座1、移動模座往復運動系統2、噴槍空間運動系統3、洗模槍往復運動系統4等4個主要機械部分及控制系統5組成,如圖1所示。移動模座1錯位布置在清洗工位1、噴涂工位1、清洗工位2和噴涂工位2,并且,同側的移動模座通過連接桿固定連接,能同步運動;噴槍空間運動系統3安裝在噴涂工位1和噴涂工位2;洗模槍往復運動系統4安裝在清洗工位1和清洗工位2;整體布局呈多組串聯直線型結構。
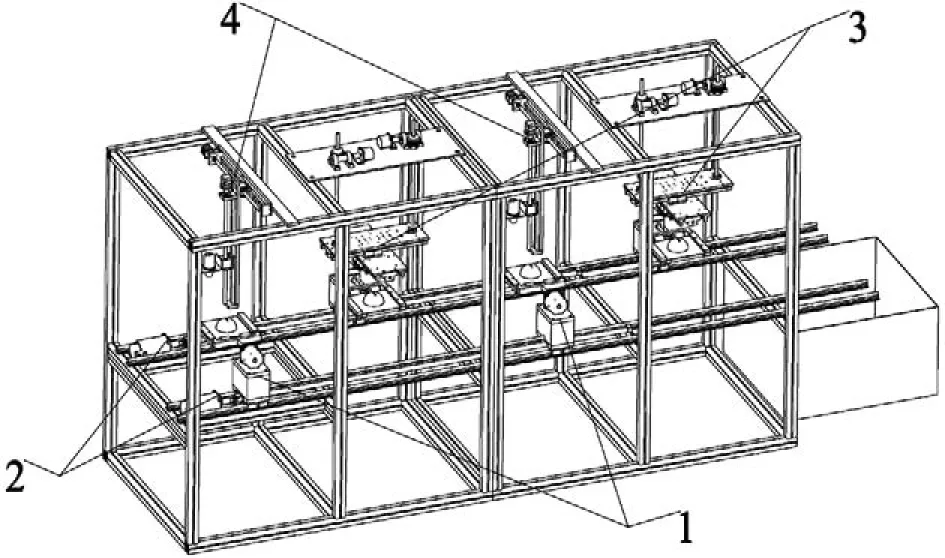
圖1 二色塑膠玩具噴涂機系統示意圖
玩具噴涂機啟動時,首先把待噴涂的塑膠玩具人工放入到位于清洗工位1的移動模座的夾模中(或自動上料),由移動模座往復運動系統將其運送到噴涂工位1,通過夾模張合和回轉運動,實現玩具在移動模座間傳遞;初始移動模座復位到清洗工位1,并對空的夾模上料;噴槍空間運動系統迫使噴槍按照預先設定的路徑到達夾模上端噴涂處并對翻轉的夾模進行噴涂及復位。完成第一種顏色噴涂的玩具,由移動模座往復運動系統將其運送到清洗工位2,并在移動模座間傳遞,由另一側的移動模座運送到噴涂工位2,進行第二種顏色的噴涂工作;此時,停留在清洗工位的移動模座,洗模槍往復運動系統驅動洗模槍對夾模進行清洗并復位。
玩具噴涂機通過結構上的模塊化及并行布置的移動模座往復運動系統,實現玩具在不同工位間的傳遞,并允許同步對銅模進行清洗及上料。當完成玩具兩種顏色的噴涂后,移動模座往復運動系統驅動移動模座至落料工位處,通過夾模張合和回轉運動,完成落料。
2 玩具噴涂機的結構組成
玩具噴涂機主要由移動模座、移動模座往復運動系統、噴槍空間運動系統和洗模槍往復運動系統組成,下面詳細介紹其結構組成和運動原理。
2.1移動模座
移動模座包括噴涂模夾總成、移動支撐座、直線滑塊軸承和步進電機等,如圖2所示。噴涂模夾總成是玩具翻轉噴涂和傳遞的關鍵部件,其上銅模的下表面和下銅模的上表面共面貼合,形成夾模。中軸一端與銅模橫梁固定連接,一端與步進電機用銷釘連接;步進電機工作時,驅動夾模同步轉動,實現塑膠玩具的360°翻轉,進而對玩具全面噴涂。移動支撐座通過直線滑塊軸承安裝在直線導軌上。
本課題研究的玩具噴涂機有四個移動模座,其噴涂模夾總成中心共面,不同移動模座間上銅模和下銅模可以重新結合,構成新的夾模,這是實現玩具在不同工位間傳遞的關鍵。同側的移動模座通過連接桿固定連接,簡化整機結構的同時,提升了銅模的定位精度。

圖2 移動模座結構示意圖
2.2移動模座往復運動系統
移動模座往復運動系統包括步進電機、滾珠絲桿、連接桿等,如圖3所示。步進電機驅動滾珠絲桿轉動,固定在絲桿螺母上的安裝座與移動模座固定連接,從而帶動移動模座作軸向往復直線運動。移動模座安裝在線性導軌上,與同側的移動模座用連接桿固定連接并同步運動。由于電機可以在需要的位置啟動、停止和調速,以及滾珠絲桿的高傳動精度,易實現移動模座的快速啟動、精確停止和速度的調節,實現玩具在不同移動模座間的傳遞。

圖3 移動模座往復運動系統結構示意圖
2.3噴槍空間運動系統
噴槍空間運動系統包括步進電機、螺桿、滾珠絲桿、導軌和齒輪等。噴槍具有三個自由度,分別為沿X軸、Y軸和Z軸的直線移動。步進電機帶動螺桿沿Z軸上下往復運動,實現噴槍的上下移動,對噴槍高度定位;其余兩個步進電機帶動滾珠絲桿轉動,使得噴槍沿X軸和Y軸移動,對噴涂位置定位。通過三個步進電機的協調配合,可以對空間中任一位置開口的銅模中的玩具進行噴涂,并保證噴漆涂層的厚度和質量[2]。
2.4洗模槍往復運動系統
洗模槍往復運動系統包括步進電機、滾珠絲桿和導軌等。洗模槍包含兩個自由度,分別為沿Y軸和Z軸的直線移動。通過調節步進電機,可以控制洗模槍相對銅模的位置,達到最佳的清洗效果。
3 控制系統設計
玩具噴涂機的控制系統可以采用多種方式,如單板機或單片機控制,這種控制方式不僅要軟件開發,還需要設計硬件電路、接口電路、驅動電路,尤其是工業現場中的抗干擾問題。因為PLC具有抗干擾能力強、可靠性高等優點,本課題主系統采用三菱PLC控制。通過觸摸屏將執行參數輸入到PLC中,運用組態軟件編寫設計程序,降低了難度,便于程序的二次開發,極大提高了產品的適應性[3]。玩具噴涂機的控制系統硬件組成如圖4所示。

圖4 控制系統硬件組成
首先編寫觸摸屏程序,把運動軌跡參數輸入到PLC中,同時在觸摸屏上顯示當前運行的坐標值,采用組態的配方數據傳遞,保證數據更新的速度。觸摸屏里可以保存多組按設定的工藝參數編好的程序,更好的適應產品更改的需求。PLC主要是處理計算觸摸屏參數,同時根據輸入信號控制步進電機的運動[4]。本文中使用的步進電機對位置和運動的精度要求比較高,因此,采用了三菱的定位模塊FX2n-1PG來控制[5]。在FX2n-1PG模塊里有一個BFM寄存器,可以設置最大速度、加速減速時間、基速等一系列參數,極大的保證了不丟步,且每次回到上頂點時坐標值都會自動回零以保證每次在同一個位置時它的坐標都是相同的,減少了累計誤差,保證了噴涂質量。
設計的多工位全自動玩具噴涂機具有如下特點:(1)玩具噴涂機可以搭配不同的銅模,即可噴涂不同尺寸物件的外表面和和不同位置;(2)移動模座的往復移動、噴槍和洗模槍的動作具有定位檢測,機械、電氣雙保險精確定位;(3)玩具噴涂機結構模塊化,能夠實現玩具360°翻轉、多種顏色的噴涂。玩具噴涂機的性能參數為:移動模座相鄰
工位間距為500 mm,移動速度400 mm/s(速度可調),日產8 000件。
4 結束語
設計的多工位全自動玩具噴涂機有移動模座、移動模座往復運動系統、噴槍空間運動系統、洗模槍往復運動系統等4個主要機械部分和控制系統組成,運用并行布置的移動模座往復運動系統,實現玩具在不同工位間的傳遞及噴涂工序、清洗工序和上下料工序的協同進行。本課題研究的二色塑膠玩具噴涂機實現了玩具360°翻轉、兩種顏色的噴涂,整機結構模塊化,通過串聯組合相同的噴涂工位和清洗工位,實現對更多顏色種類的噴涂。采用PLC控制技術,實現了自動高效噴涂并保證噴涂品質和產量。該塑膠玩具噴涂機還具有工作可靠、卸料容易等優點,適合玩具企業的需要。
參考文獻:
[1]盧飛躍,薛小偉.塑膠玩具制造工藝[M].北京:化學工業出版社,2010.
[2]張永貴.噴涂機器人若干關鍵技術研究[D].西安:西安理工大學,2008.
[3]徐曉東,蔣益興,宋瑞宏,等.內壁自動噴涂機控制系統的設計與研制[J].機電工程,2008,25(9):74-76.
[4]沈惠平,蔣益新,宋瑞宏,等.物件內壁全自動噴涂機的設計與研制[J].機械設計,2009,26(2):76-78.
[5]秦春斌,張繼偉. PLC基礎及應用教程[M].北京:機械工業出版社,2011.
(編輯:阮毅)
Design of a Multi-Station Full Automatic Spraying Machine for Toys
LIN Min,XU Xiao-ming,PENG Zhong-kai
(College of Mechanical and Electrical Engineering,Guangdong University of Technology,Guangzhou 510006,China)
Abstract:A kind of multi-station full automatic spraying machine was described,which was suitable for surface spraying of small plastic toys. First,the working principle of multi-station full automatic spraying machine was expounded in detail,and then the structural constitutions were introduced,including the moving mold holder,the moving mold holder reciprocation system,the gun space motion system and the wash-gun reciprocation system. Finally,the control system was determined. This machine can achieve toy 360°flip and spray a plurality of colors,with the advances of reliable,modular structure and easy unloading materials. A little reformation of this machine would also be suitable for surface spraying of other small objects.
Key words:spraying;multi-station;spraying machine;modular
作者簡介:第一林敏,男,1991年生,江西贛州人,碩士研究生。研究領域:機械設計及理論。
收稿日期:2015-05-06
DOI:10. 3969 / j. issn. 1009-9492. 2015. 11. 007
中圖分類號:TH122
文獻標識碼:A
文章編號:1009-9492 ( 2015 ) 11-0026-03
猜你喜歡
海洋信息技術與應用(2022年1期)2022-06-05 07:38:22
裝備制造技術(2021年2期)2021-07-21 05:38:44
現代裝飾(2020年5期)2020-05-30 13:01:56
汽車與新動力(2019年5期)2019-11-07 05:20:16
系統管理學報(2018年3期)2018-08-13 01:05:42
中國核電(2017年2期)2017-08-11 08:00:56
流程工業(2017年4期)2017-06-21 06:29:52
流程工業(2017年4期)2017-06-21 06:29:50
石油化工建設(2015年2期)2015-12-01 04:16:44
中國教育技術裝備(2015年10期)2015-03-01 02:41:05
