大擺錘驅動頭動力學建模與仿真研究**國家質檢總局科技計劃項目(編號:2014QK255)
2015-03-12 02:05:44宋偉科單宇佳中國特種設備檢測研究院北京100029
機電工程技術 2015年11期
宋偉科,單宇佳,趙 欣(中國特種設備檢測研究院,北京 100029)
?
大擺錘驅動頭動力學建模與仿真研究**國家質檢總局科技計劃項目(編號:2014QK255)
宋偉科,單宇佳,趙欣
(中國特種設備檢測研究院,北京100029)
摘要:在正常滿載工況和極限偏載工況條件下,利用虛擬仿真技術對典型旋轉類游樂設施-大擺錘驅動頭進行了動力學仿真分析研究,考慮了轉盤旋轉對驅動頭回轉支承的影響,更加真實的獲取了大擺錘驅動頭部分的運動學和動力學特性。在此基礎上進行了驅動軸疲勞強度計算,為大擺錘的結構優化設計提供了理論基礎。
關鍵詞:大擺錘驅動頭;動力學仿真;疲勞分析;設計優化
0 引言
大擺錘作為一種典型的旋轉類大型游樂設施,目前已成為國內增長速度最快、數量最多、年載客最大的大型游樂設施之一。由于其復雜運動形式和高位驅動方式,大擺錘存在的潛在事故風險也是最多的。為了獲得大擺錘驅動頭事故發生的本質原因,對大擺錘驅動頭部分進行系統的動力學分析研究勢在必行。由于其復雜的運行形式,傳統理論計算方法無法充分考慮各種復雜工況對設備性能的影響,因此很難準確的進行運動學和動力學計算。本文在分析大擺錘運行特點、運動拓撲結構和動力學模型的基礎上,利用虛擬樣機技術,采用Pro/E三維建模和ADAMS建模方法,建立大擺錘整機動力學模型。在滿載運行工況條件進行了大擺錘運動學及動力學仿真分析,并在此基礎上開展了減速機驅動軸的疲勞壽命計算。通過仿真分析和理論計算,獲得大擺錘動力頭部分的運動學和動力學特性,為后續的結構優化設計提供理論基礎。
1 大擺錘拓撲結構分析與建模
根據大擺錘的結構原理、運行特點及實際分析的需要,對大擺錘的結構進行簡化,分析各部分連接關系,建立其多體系統拓撲結構,如圖1。圖1中,方框表示動力學分析時的零件,方框之間的連線表示零件之間的連接關系,Fixed為固定副,兩零件之間不發生相對運動;Revolution為旋轉副,兩零件之間只能沿一個給定軸線相對轉動;Spherical為球面副,兩零件之間只有三個方向的相對轉動,無相對位移。

圖1 大擺錘拓撲結構圖
本文利用Pro/E建立大擺錘三維模型,通過Pro/E和ADAMS接口將模型導入ADAMS中進行運動學和動力學分析。本文模型為市場上常見的30人大擺錘,動力學模型如圖2所示。
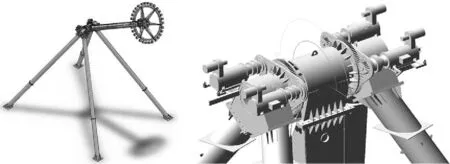
圖2 大擺錘動力學模型
大擺錘的運動形式為擺臂擺動和座艙的旋轉運動,本文利用ADAMS中的SFORCE函數仿真擺臂驅動力矩,利用ADAMS自帶的SIGN變相函數來實現驅動單擺運動[2-3],通過擺動角度的方向控制驅動扭矩方向,使用傳感器SEN?SOR實現在在吊臂擺動角度達到110°時,失效驅動扭矩,在自由擺動4次(單向擺動4次)后,啟用制動扭矩實現擺動的減速、制動。通過MOTION函數來仿真轉盤轉動的驅動,實現恒轉速72 deg/s。
根據《游樂設施安全規范》(GB8408)要求,系統坐標系定義如下,X為擺動軸向,Y為回轉且徑向垂直于吊臂方向,Z為重力方向[4]。
2 大擺錘運行工況分析與仿真
大擺錘在運行過程中有多種工況,如滿載、偏載、空載、風載(正向及側向)、地震載荷等,由于篇幅有限,同時考慮大擺錘日常運營中的實際情況,本文只選取滿載和偏載兩種工況進行仿真研究。其中滿載工況主要考慮設備在滿負荷載荷條件下的運動學和動力學性能。由于游樂園的運營分淡季和旺季,游樂設施不可避免存在不滿載運行工況,為了獲取大擺錘在極限偏載工況下的動力學性能,本文對偏載量為連續1/2滿載工況進行仿真分析。
2.1滿載工況
本節仿真不考慮系統各種誤差可能[6-8],僅僅仿真大擺錘在滿載正常運行工況下的運動學和動力學特性。通過仿真,大擺錘吊臂角速度和角加速度曲線如圖3、4所示,乘客速度及加速度曲線如圖5、6所示。大擺錘滿載工況下運動學特性見表1。
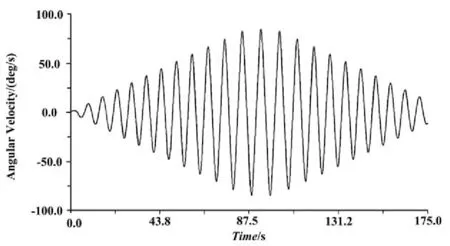
圖3 吊臂擺動角速度曲線
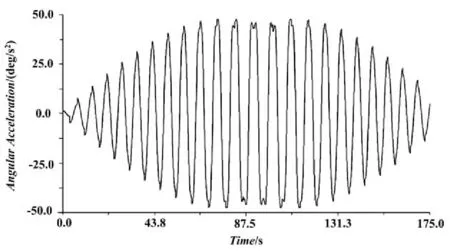
圖4 吊臂擺動角加速度曲線

圖5 乘客運動速度曲線
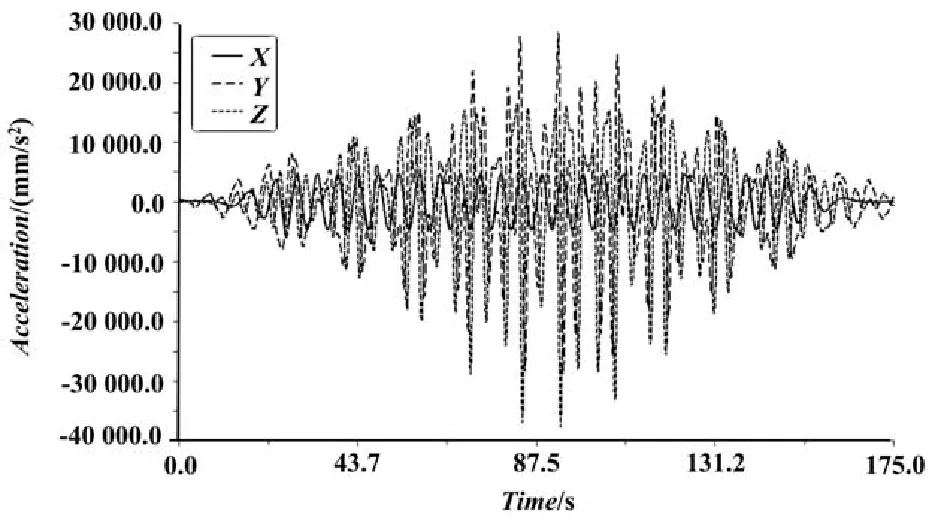
圖6 乘客運動加速度曲線
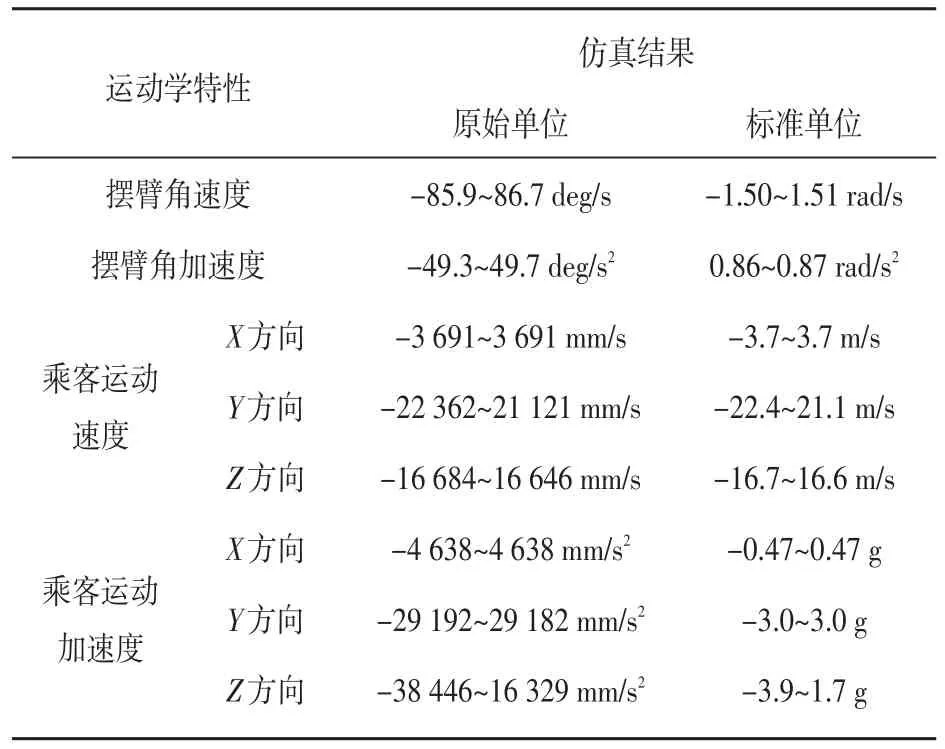
表1 運動學特性仿真結果
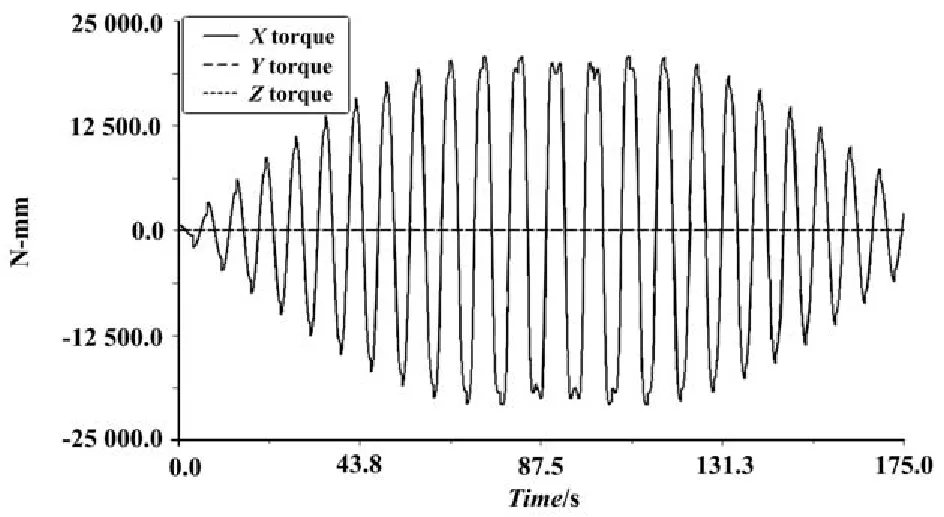
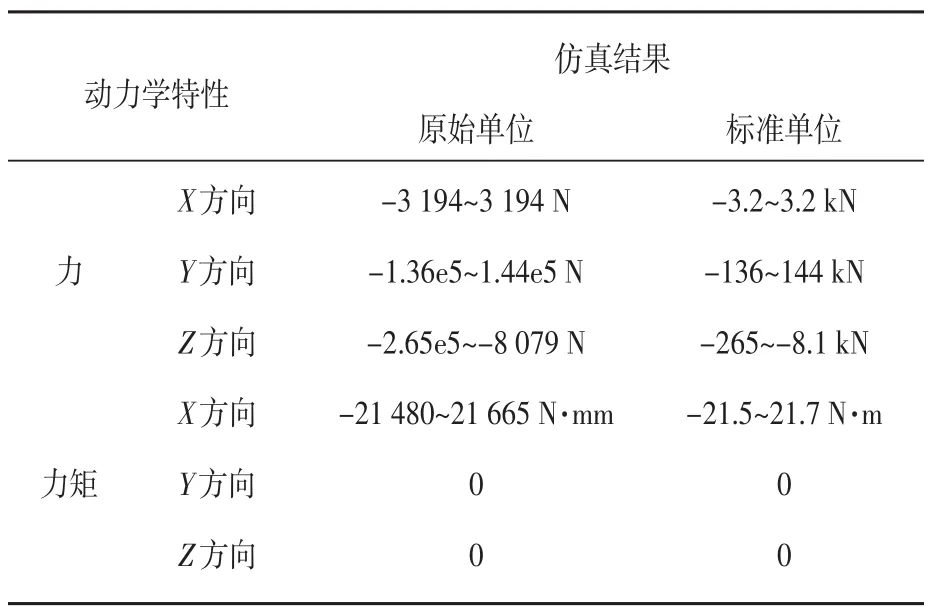
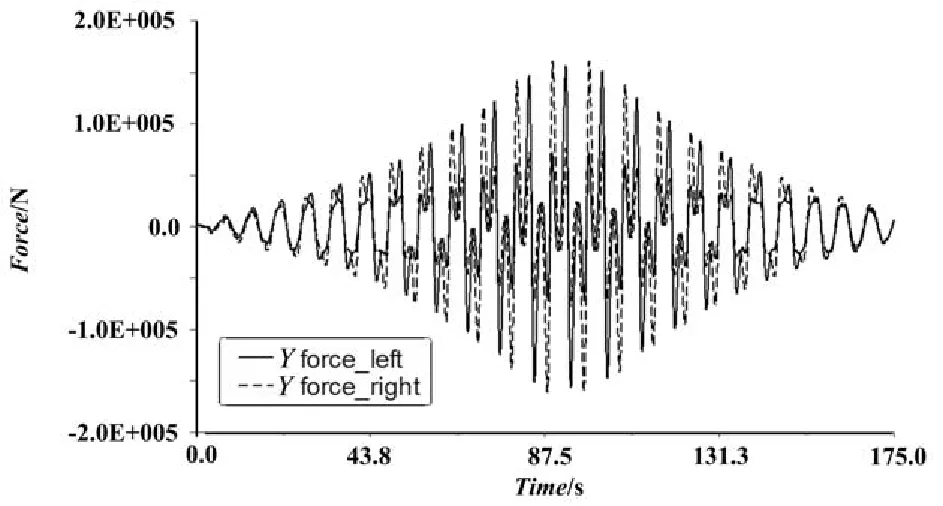
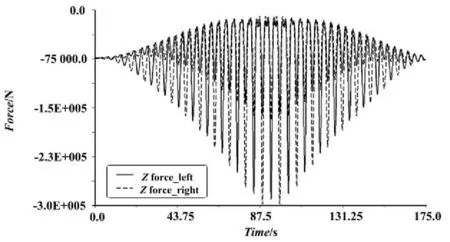
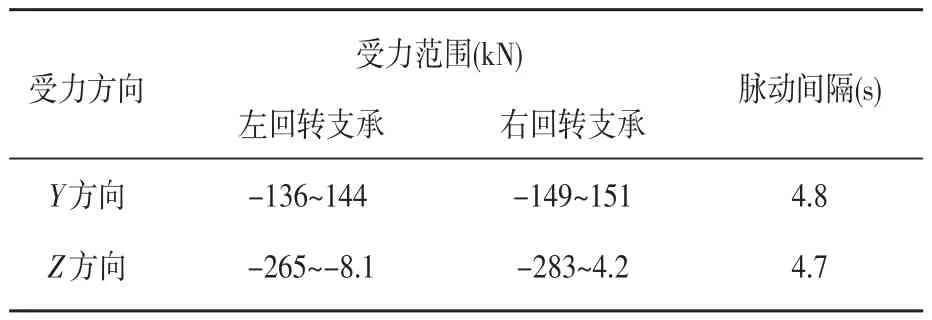
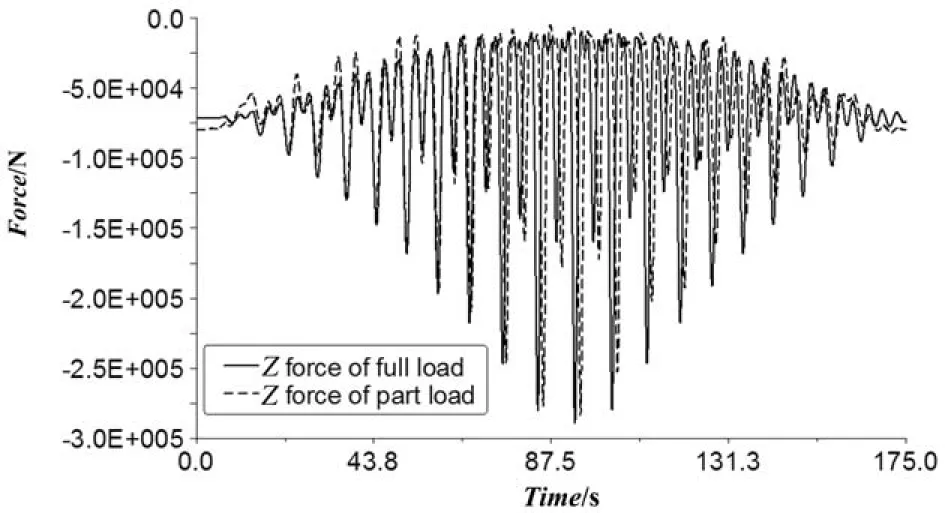
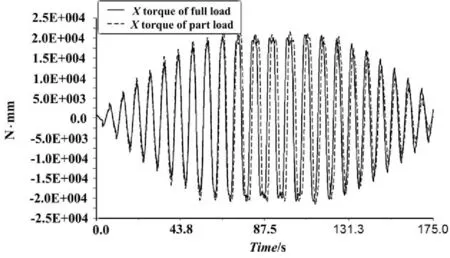
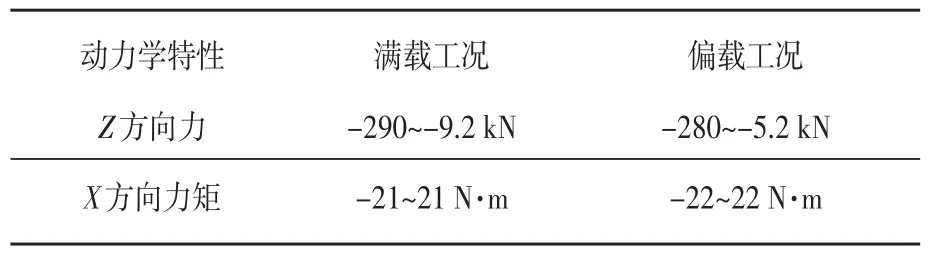
由表1可見,乘客在復合運動時最大速度出現在Y側向,最大加速度出現在Z向,根據游樂設施安全規范(GB8408-2008)要求,僅考慮持續時間大于0.1 s的穩定加速度,加速度允許值|ay|=2.5g,-6.0g 大擺錘驅動頭回轉支承承受擺臂轉盤及乘客在擺動和旋轉復合運動下的載荷,理論計算無法獲得詳細動力學特性,在滿載工況下回轉支承在各個方向的力和力矩如圖7、8所示。 圖7 滿載工況下回轉支承受力曲線 大擺錘滿載工況下回轉支承動力學特性見表2。 表2 回轉支承動力學特性仿真結果 由表2可見,回轉支承在Y和Z方向上受力較大,在X方向上力矩最大。由分析可知,X方向力矩主要為驅動和制動力矩,Y和Z方向受力主要為擺臂及轉盤座艙自重及擺動過程引起的慣性力及其分量等。因此對于大擺錘回轉支承的動力學特性,可以重點關注X方向的力矩和Y、Z方向受力即可。 由于大擺錘的運動由兩種形式組成,擺臂擺動的同時座艙轉盤還進行自旋轉運動,因此驅動頭回轉支承除承受擺臂的擺動慣性力之外還承受由于座艙自轉引起的徑向力波動,該受力很難進行理論計算。在本次動力學仿真中,座艙回轉方向為順時針方向(自上而下),對左右回轉支承徑向(Y向)和重力向(Z向)受力進行了對比仿真研究,仿真曲線如圖9和10所示。左右回轉支承受力特性對比分析見表3。 圖9 左右回轉支承Y向受力分析對比曲線 圖10 左右回轉支承Z向受力分析對比曲線 表3 左右回轉支承力學特性對比表 圖9與圖3擺臂角速度曲線對比可知,在角速度最大時,即擺臂豎直位置,左右回轉支承均不承受擺動軸徑向載荷;而圖10與圖3擺臂角速度曲線對比可知,在角速度最大時,左右回轉支承的Z向受力最大,與實際運行工況相符。 大擺錘在擺臂擺動的同時,座艙轉盤在回轉支承轉動作用下回轉,造成左右回轉支承的受力特性存在時間間隔,由旋轉角速度ω=72deg/s可知,T=5 s,實際仿真結果左右回轉支承最大受力時間間隔為4.7~4.8 s,與理論計算一致,從而驗證了大擺錘復合運動工況下的驅動頭受力情況。 2.2偏載工況 大型游樂設施不同于其他一般類機械設備,由于存在旅游淡季和旺季的差別,游樂設施在運行時,經常發生偏載運行工況,本節對大擺錘驅動頭極限偏載工況進行動力學仿真研究,極限偏載工況為乘客的連續1/2滿載,根據上節對大擺錘驅動頭滿載工況的仿真結果可知,驅動頭主要在Z方向受力(如圖7)和X方向扭矩(如圖8)最大,因此本節主要仿真偏載工況下的Z方向力和X方向扭矩,仿真結果如圖11和圖12所示。 圖11 回轉支承滿載和偏載Z向受力分析對比 圖12 回轉支承滿載和偏載X向力矩分析對比 回轉支承在滿載和偏載工況下的受力特性對比分析見表4。 表4 回轉支承不同工況動力學特性仿真結果 由上述仿真結果可以看出,由于偏載作用,導致載荷量減小,慣性力減小,從而導致Z向受力相應減小。而對于回轉支承力矩,由于轉盤旋轉作用,導致回轉支承在不同時間所受力矩變動明顯,力矩量值變化不大。 通過對大擺錘滿載和偏載運行工況的運動學和動力學仿真研究可以獲知設備的運動特性,設備的速度和加速度性能滿足相關規范要求。在驅動頭部分,通過XYZ三個方向的受力和力矩仿真可以獲得詳細的動力學性能,滿載工況為設備的危險工況,受力最大,應在此工況下對設備的主要受力部件進行強度分析,而偏載工況下,設備的沖擊更為明顯,對回轉支承和傳動軸的影響更明顯,應對動力頭部分進行重點分析。 大擺錘減速機驅動軸通過小齒輪將動力傳遞給回轉支承,實現擺臂的擺動,因此驅動軸承除了承受自身扭矩外,還要承受驅動齒輪與回轉支承嚙合處的切向力帶給軸的彎矩,故軸的分析屬于彎扭合成類型:查《機械設計手冊》第二冊中疲勞強度安全系數校核公式[9]為: 式(3)中,Sσ是只考慮彎矩作用時的安全系數,Sτ是只考慮扭矩作用時的安全系數;Sp是按疲勞強度計算的許用安全系數,取1.73。下面分別從彎矩和扭矩兩個方面開展計算分析。 彎矩方面:運行時齒輪接觸力對減速機驅動軸會產生一個徑向力,F=T/Rcosα,其中T為驅動軸傳遞的最大扭矩,R為驅動小齒輪分度圓半徑,α為齒輪壓力角,一般為20°。由仿真可知,按脈動循環計算疲勞強度。 扭矩方面:按減速機額定輸出扭矩計算。 由公式(1)可得,減速機驅動軸的彎矩組合疲勞強度安全系數為S=1.78≥1.73。由疲勞計算可知,該驅動軸疲勞強度滿足安全規范要求,理論上為無限壽命。 本文在分析大擺錘拓撲結構基礎上,通過動力學仿真獲取了大擺錘驅動頭部分在滿載和偏載工況條件下的運動學和動力學特性,分析了由于轉盤轉動對左右回轉支承造成的載荷影響,更加接近實際運行工況,在動力學仿真的基礎上開展了大擺錘驅動軸疲勞強度校核分析,從而為后續的大擺錘驅動頭結構優化設計提供了理論基礎,更有利于降低設備研發成本,提高設備安全性能。 參考文獻: [1]林偉明.典型游樂設施復雜工況下風險評估及故障預防研究[M].北京:北京化工大學出版社,2013. [2]陳立平.機械系統動力學分析及ADAMS應用教程[M].北京:清華大學出版社,2005. [3]朱海榮.基于虛擬樣機技術的游樂設施安全分析方法探討[J].中國安全科學學報,2004,14(3):12-15. [4]EN13814-2004. Fairground and amusement park machin?ery and structure-safety[S]. [5]梁朝虎.過山車動態仿真建模方法研究[J].系統仿真學報,2006,18(增1):280-283. [6]梁朝虎.滑行車類游樂設施動力學建模與仿真[J].中國安全科學學報,2007,17(9):14-20. [7]于澤濤.基于虛擬樣機技術的過山車仿真研究[D].大連:大連理工大學,2009. [8]陳朝陽,王躍勇,李炳堅.大擺錘游藝機加速度分析[J].機電工程技術,2011,40(8):103-106. (編輯:阮毅) Research on Large Pendulum Driving Unit Dynamic Modeling and Simulations SONG Wei-ke,SHAN Yu-jia,ZHAO Xin Abstract:To obtain the more detailed dynamic characteristics of large pendulum in complex working condition and analyze its failure mode,this paper puts forward the dynamic simulation of a full-load and part-load large pendulum considering the influence on the slewing bearing because of the rotation of gondola. Therefore,the submitted simulation obtains the more authentic kinematic and dynamic characteristics of large pendulum driving unit. Thereafter,the fatigue safety calculation of drive shaft has been done,which provides the base for optimizing the design of large pendulum. Key words:large pendulum driving unit;dynamic simulation;fatigue analysis;design optimization 作者簡介:第一宋偉科,男,1983年生,山東泰安人,博士研究生,工程師。研究領域:大型游樂設施安全保障技術。 收稿日期:2015-05-28 DOI:10. 3969 / j. issn. 1009-9492. 2015. 11. 004 中圖分類號:TP391.9 文獻標識碼:A 文章編號:1009-9492 ( 2015 ) 11-0016-05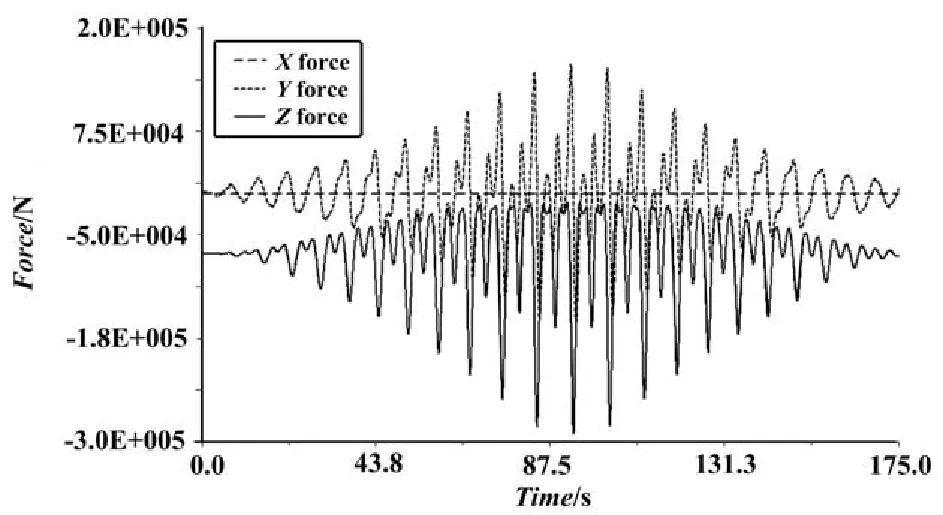
3 驅動軸疲勞強度校核



4 結論
(China Special Equipment Inspection and Research Institute,Beijing100029,China)
