匹配的不對稱閥控制不對稱缸液壓系統的研究**廣東輕工職業技術學院校級科技類項目(編號:KJ201402)
2015-03-12 02:05:48肖世耀司振軍廣東輕工職業技術學院機電工程系廣東廣州50300廣州十工液壓科技有限公司廣東廣州543
機電工程技術 2015年11期
肖世耀,司振軍(.廣東輕工職業技術學院機電工程系,廣東廣州 50300;.廣州十工液壓科技有限公司,廣東廣州 543)
?
匹配的不對稱閥控制不對稱缸液壓系統的研究**廣東輕工職業技術學院校級科技類項目(編號:KJ201402)
肖世耀1,司振軍2
(1.廣東輕工職業技術學院機電工程系,廣東廣州510300;2.廣州十工液壓科技有限公司,廣東廣州511431)
摘要:針對非匹配的不對稱閥控缸液壓系統本身存在的弱點,提出了匹配的不對稱閥控制不對稱液壓缸的控制方法,并對匹配的不對稱閥控缸液壓系統的的壓力和流量特性進行研究,理論研究和仿真結果表明:采用匹配的不對稱閥控制不對稱液壓缸控制方法可以很好的解決壓力突變及動靜態性能不對稱性問題,有利于提高了液壓控制系統的穩定性。
關鍵詞:不對稱閥;不對稱缸;壓力突變;動靜態性能
0 前言
不對稱液壓缸具有結構緊湊、加工容易、安裝方便等優點[1],因此它在液壓位置/力伺服系統中得到了廣泛的應用[2]。目前,在液壓位置/力伺服系統中,伺服閥節流口的通流面積之比一般為1∶1或1∶2,而不對稱液壓缸受安裝位置等條件的限制,其無桿腔與有桿腔活塞面積之比在一個很廣的范圍內變化,這就使得在很多情況下二者的比值不相等,即伺服閥與液壓缸不具有匹配性[3]。非匹配的閥控缸液壓系統在運行的過程中在正反方向上的速度特性及動態特性不同,導致了系統正反方向上的動靜態特性存在差異[4]。
本文針對非匹配的不對稱閥控缸液壓系統本身存在的弱點,提出了匹配的不對稱閥控制不對稱液壓缸的控制方法,并對匹配的不對稱閥控缸液壓系統的的壓力和流量特性進行研究,理論研究和仿真結果表明:采用匹配的不對稱閥控制不對稱液壓缸控制方法可以很好的解決壓力突變及動靜態性能不對稱性問題,有利于提高液壓控制系統的穩定性。
1 匹配不對稱閥控制不對稱缸的定義
圖1所示的是不對閥控制不對稱液壓缸原理圖。液壓缸左腔的面積為A1,壓力為P1;右腔的面積為A2,壓力為P2。設Aa、Ab分別為伺服閥節流口A、B的通流面積,無桿腔與有桿腔活塞面積之比為ia,則ia=A1/A2;閥的A、B節流口的節流面積之比為ja,則ja=Aa/Ab。如果ja≠1,則該閥為不對稱閥;ia≠1,則該液壓缸為不對稱液壓缸;如果ja≠1,ia≠1,ja=ia,則稱為匹配的不對稱閥控制不對稱缸。

圖1 不對閥控制不對稱液壓缸原理圖
2 匹配的不對稱閥控缸的性能研究
2.1伺服閥處于右位時
伺服閥閥芯處于右位時,如圖2(a)所示,節流口P→A,B→T處于工作狀態。液壓缸活塞桿在壓力油的作用下推動負載向右運動。根據薄壁小孔流量公式:

式(1)中AT,Δp——小孔通流截面的面積和兩端的壓差;
Cq——流量系數;
ρ——液壓油密度。
于是可以得到通過節流口P→A,B→T的流量與其壓降的關系:

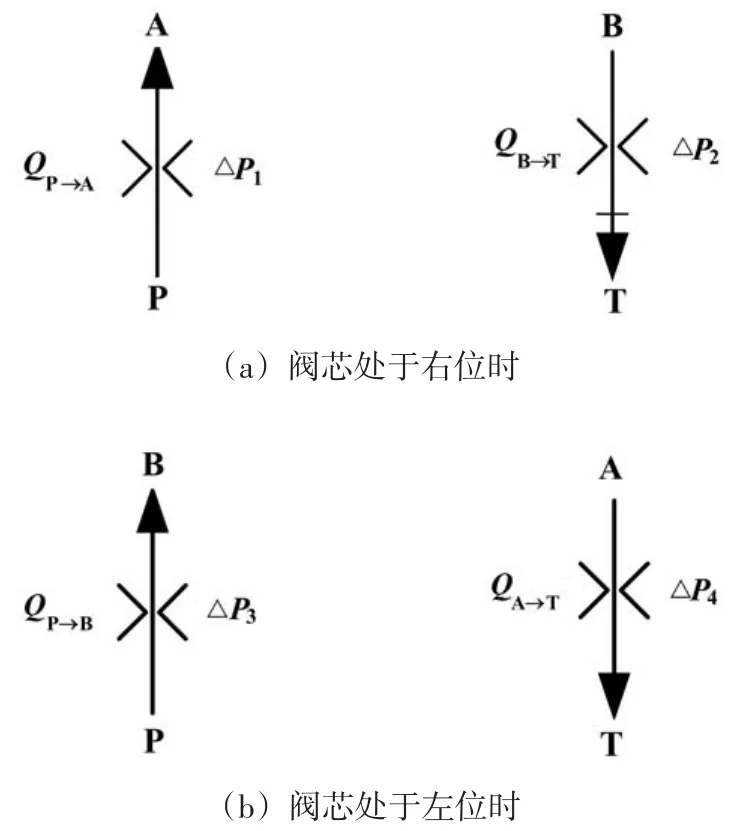
圖2 節流口流量與壓差關系
理論條件下,當Δp1=Δp2時,即在節流口P→A,B→T壓降相等條件下,通過它們的流量要滿足如下關系:

2.2伺服閥處于左位時
伺服閥閥芯處于左位時,如圖2(b)所示,節流口P→B,A→T處于工作狀態。液壓缸活塞桿在壓力油的作用下推動負載向左運動。同理可以得到通過節流口P→B,A→T的流量與其壓降的關系。

當Δp3=Δp4時,即在節流口P→B,A→T壓降相等條件下,通過它們的流量要滿足如下關系:

由于非對稱液壓缸兩腔的有效截面積不同,當非對稱液壓缸活塞在相反方向運行時,在相同速度下,通過伺服閥節流口的流量是不相同的。為了使液壓缸在換向時不產生壓力突變,則要求活塞在正反方向運行時具有相同的速度。忽略液壓缸和閥的泄漏以及假設液壓油不可壓縮,可得活塞具有相同速度的條件為:

聯立公式(3)、(6)、(8)可得:

聯立公式(2)、(5)、(9)可得:

當Δp2=iaΔp4時,根據式(10)得;根據式(11)得
3 匹配的不對稱閥控缸的仿真驗證
為了驗證匹配不對的閥控缸液壓系統所具有的性能,利用液壓仿真軟件AEMsim對其動態特性進行了仿真研究,所建立的匹配的不對稱閥控缸仿真模型如圖3所示。

圖3 匹配的不對稱閥控缸仿真模型
模型中的各元件均采用了AEMsim的標準元件庫的子模型。在AEMsim的參數模式(Parame?ters mode)下,設置系統主要元件的仿真參數如表1所示,伺服閥的仿真參數如表2所示。
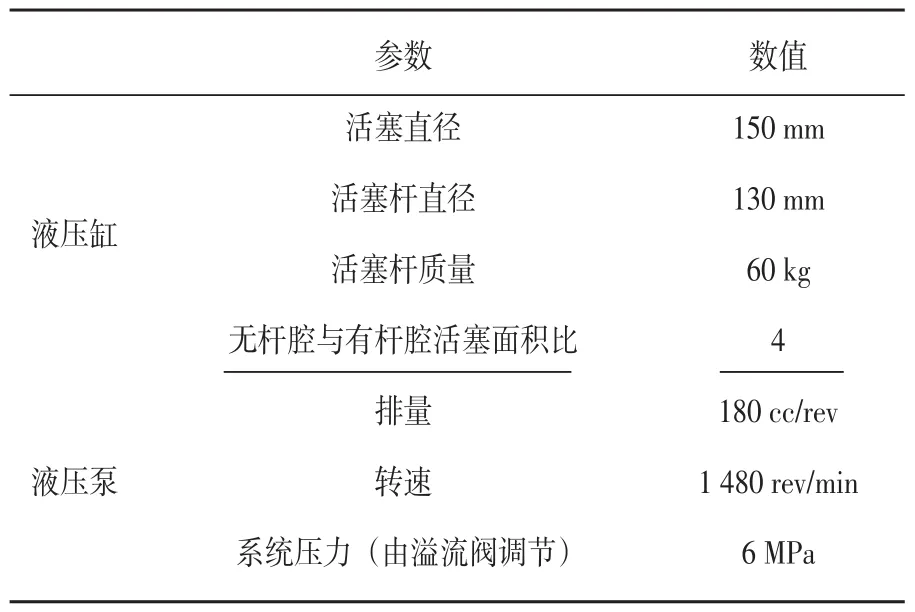
表1 系統主要AEMSim仿真參數
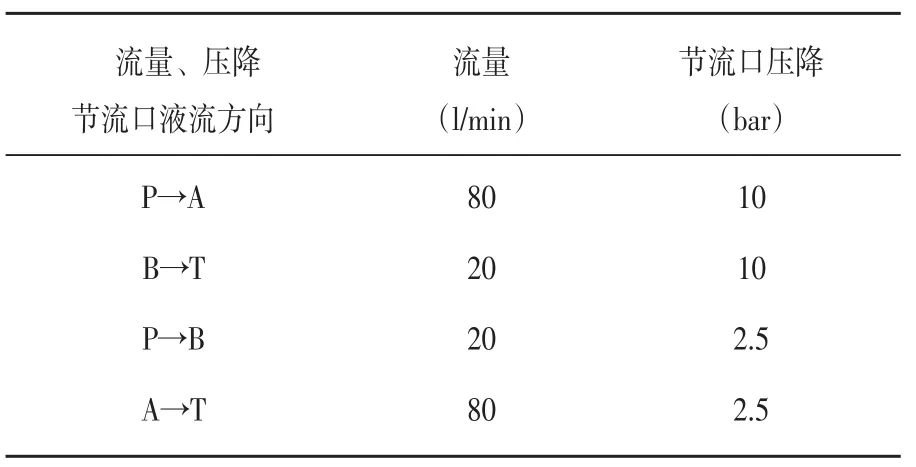
表2 伺服閥仿真參數表
伺服閥的控制的信號通過線性信號源給定,每0.6秒改變控制信號的方向;負載由由線性信號源設定為2 000 N(模擬重力負載)。設置好所有元件的參數后,進入到AEMsim的運行模式(Run mode),設置仿真時間為3.6秒、仿真步長為0.01、按照單步運行的運行方式開始仿真。于是可以得到,匹配不對稱閥控缸系統液壓缸的位移曲線和速度曲線,分別如圖4、圖5所示。

圖4 匹配的不對稱閥控缸系統活塞桿的位移曲線
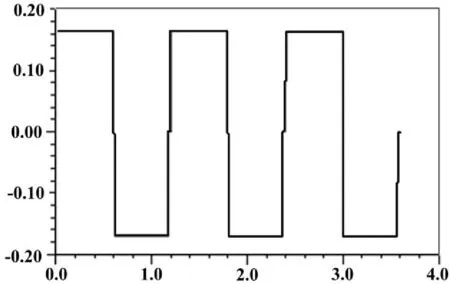
圖5 匹配的不對稱閥控缸系統活塞桿的速度曲線
通過液壓缸的位移曲線(圖4)可以看出,液壓缸在正反方向運動時保持了很好的對稱性;通過液壓缸的速度曲線(圖5)可以看出,液壓缸在正反方向運動時速度大小基本上相等,這表明液壓缸在換向的時候,活塞桿腔和活塞腔幾乎沒有壓力沖擊,克服了液壓缸活塞桿運動方向變化時液壓缸兩腔的壓力突變。
通過仿真還可以得到伺服閥的詳細仿真結果,包括各節流口的面積、通過各節流口的流量和壓降。具體數值如表3所示。
由3可以看出,伺服閥的節流口的面積的比例關系與公式(10)、(11)保持了很好的對應關系:AA→T=8AB→T、AP→A=1.995AP→B,正是保持這種比例關系才實現了液壓缸在正反方向運動時速度大小相等。
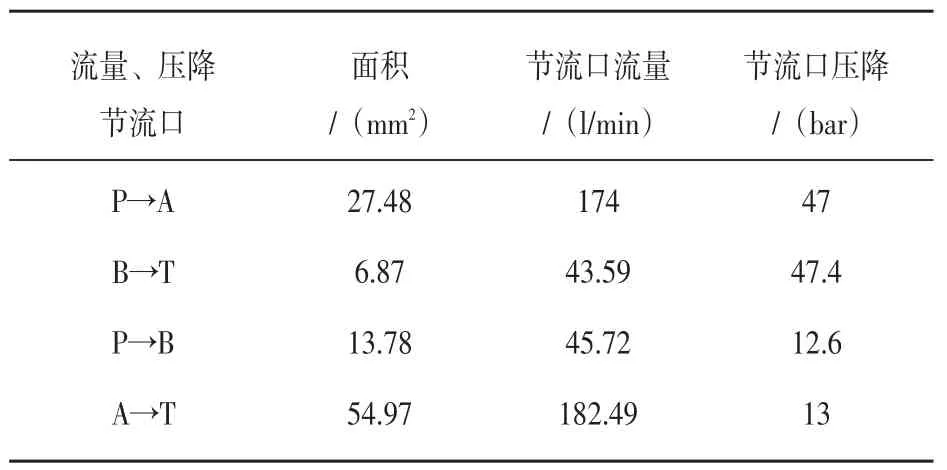
表3 伺服閥節流口的的仿真結果
為了與以上仿真結果對照,更改表2中伺服閥各節流口的參數,使之變成對稱的伺服閥,只需要使通過節流口B→T、P→B、A→T的流量和壓強與節流口P→A相同(流量80 l/min。壓降10 bar),得到的仿真模型變成了非匹配的對稱伺服閥控制不對稱液壓缸仿真模型。在只改變伺服閥的參數條件下,同樣可以得出液壓缸在正反方向的運動的位移和速度曲線,如圖6、圖7所示。通過分析圖6、圖7可以很明顯的看出液壓缸在正反方向運動時不具有對稱性,正反方向運動的速度相差也很大,在換向的時候,液壓缸兩腔講產生較大的液壓沖擊,不利于液壓缸運行的穩定性。
對比圖4、圖5與圖6、圖7可以很清楚的看出,不對稱液壓缸采用與之相匹配的不對稱伺服閥控制,液壓缸具有優良的動態性能,保持了很好的對稱性;不對稱液壓缸采用對稱伺服閥控制,液壓缸的動態性能很差。
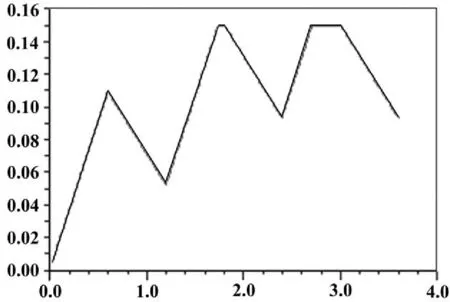
圖6 對稱閥控制不對稱缸系統活塞桿的位移曲線
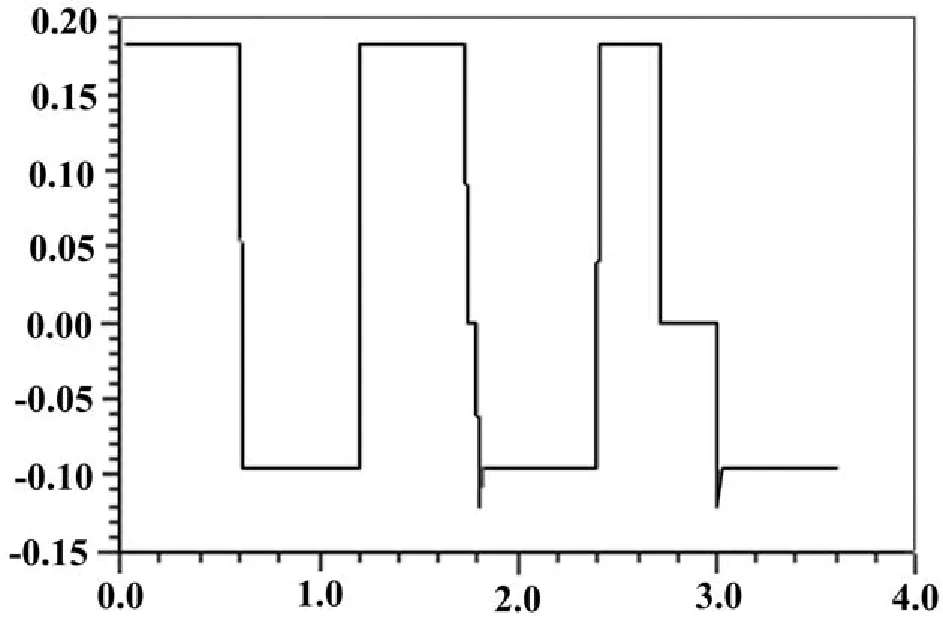
圖7 對稱閥控制不對稱缸系統活塞桿的速度曲線
4 結論
通過以上的分析與仿真結果對比可以很看出:采用匹配的不對稱伺服閥控制不對稱液壓缸,當伺服閥換向時,液壓缸兩腔不會產生壓力突變現象;液壓缸在正反方向運動時保持了很好的對稱性,速度特性相同,即輸入幅值大小相等的控制信號時,正反兩個方向的速度是相同的,這對液壓系統的開環控制來說,尤為重要。
在實際的選擇伺服閥控制液壓缸運動的過程中,要盡可能使閥和缸具有匹配性,在運動控制精度要求高的場合顯得尤為重要。當然,為了使閥和缸具有匹配性,很多時候要求與伺服閥的生產廠家聯系單獨訂貨,這就增加了伺服閥制造成本。
參考文獻:
[1]王進華.控制單活塞桿液壓缸的不對稱伺服閥[J].液壓與氣動,1992(4):18-19.
[2]劉榮,王宣銀,吳根茂.廣義脈碼調制閥控制非對稱缸動力特性研究[J].中國機械工程,2004,15(2):154-156 .
[3]王棟梁,李洪人,張景春.非對稱閥控制非對稱缸的分析研究[J].山東建材學院學報,2001,15(2):123-127.
[4]張業建,李洪人.非對稱缸系統液壓缸兩腔壓力特性的研究[J].機床與液壓,2000(5):63-64.
(編輯:阮毅)
Research on Hydraulic System of Matched Asymmetric Valve Controlling Asymmetric Cylinder
XIAO Shi-yao1,SI Zhen-jun2
(1.School of Electro-mechanical Engineering,Guangdong Industry Technical College,Guangzhou 510300,China;2.Guangzhou Ten-Union Hydraulic Science&Technology Co.,Ltd.,Guangzhou 511431,China)
Abstract:This paper analyzes the weakness on unmatched asymmetric valve controlling asymmetric cylinder,puts forward the control methods of matched asymmetric valve controlling asymmetric cylinder and does research on pressure and flow characteristics of it.The theoretical study and simulation results show that this control method can well solve the pressure jump dynamic and static performance asymmetry problem,and improve the stability of the hydraulic control system.
Key words:asymmetric valve;asymmetric cylinder;pressure jump;dynamic and static performance
作者簡介:第一肖世耀,男,1982年生,湖北麻城人,碩士研究生,工程師。研究領域:機電一體化技術。
收稿日期:2015-05-20
DOI:10. 3969 / j. issn. 1009-9492. 2015. 11. 009
中圖分類號:TP271+.31
文獻標識碼:A
文章編號:1009-9492 ( 2015 ) 11-0033-04
