面向伺服電機的STM32單片機控制系統設計**國家自然科學基金項目(編號:51275068);航空科學基金項目(編號:20130863);中央高校基本科研業務費(編號:DUT15LK21)
2015-03-12 02:05:58李鋒濤代月幫段富海王亞杰大連理工大學機械工程學院遼寧大連116024
機電工程技術 2015年11期
桑 勇,李鋒濤,代月幫,段富海,王亞杰(大連理工大學機械工程學院,遼寧大連 116024)
?
面向伺服電機的STM32單片機控制系統設計**國家自然科學基金項目(編號:51275068);航空科學基金項目(編號:20130863);中央高校基本科研業務費(編號:DUT15LK21)
桑勇,李鋒濤,代月幫,段富海,王亞杰
(大連理工大學機械工程學院,遼寧大連116024)
摘要:介紹了一種基于STM32F103ZET6單片機的交流伺服電機位置、速度和轉矩控制方案,完成了控制系統軟硬件設計、電機調試參數設置和伺服電機控制結構圖等方面的工作。人機接口(HMI)采用LabVIEW圖形化編程語言設計,交互性強,界面友好。與傳統的單片機控制方案相比,該控制系統具有經濟性好,處理速度快,實時性好,集成度高和抗干擾性強等優點,能較好地實現交流伺服電機的精確位置定位及勻速運轉控制。
關鍵詞:STM32;交流伺服電機;位置控制;速度控制;轉矩控制
0 引言
伺服電機是一種在伺服系統中控制機械設備運轉的控制電機,用來實現位置、速度、加速度和轉矩等的精確控制。伺服電機可分為直流伺服電機和交流伺服電機兩大類,而由于交流伺服電機具有體積小,慣量低,速度高,響應快,轉矩大,無電刷和換向器,散熱好等優點,已經廣泛應用于自動控制系統和自動檢測系統中[1]。德國柏林工業大學電子研究所的Dietrich H.Naunin和Hans-Christian Reuss教授[2]提出的數字伺服驅動控制系統促進了伺服驅動器技術向高速動態響應和高集成度的方向發展。微電子、集成電路技術、大功率高性能半導體器件和控制理論與技術的飛速發展,又使得PLC和單片機等微控制器技術在數字伺服系統中得以廣泛運用。單片機因其經濟性好,可靠性高,處理能力強,低壓低功耗,系統結構簡單,易于實現模塊化,使用方便等優點,從而廣泛用于對伺服電機控制器的控制,伺服驅動器接收單片機發出的脈沖指令和模擬信號等指令,進而控制伺服電機的運轉狀態以滿足不同場合的需要[3]。伺服電機用作執行元件,可把所收到的電信號轉換成電動機軸上的角位移或角速度輸出[4],因此可較方便的運用具有邏輯控制能力的單片機或PLC等實現對伺服電機的控制。目前用單片機控制伺服電機的方案有很多,如華中科技大學蔡志祥,沈陽航空工業學院孫克梅等人提出的基于AT89C51單片機的伺服電機控制方案[5-6],南京郵電大學黃之然以及長春理工大學李紅偉等人的基于STC12C5A60S2單片機的伺服控制方案[7-8],還有燕山大學張立麗等人提出的PIC18F452單片機的控制方案[9]。以上普通單片機雖能實現相關控制要求,但其內部集成模塊少,外圍擴展電路復雜,控制成本高,處理速度慢,抗干擾能力弱,而PLC成本又相對較高。針對上述問題,提出采用意法半導體公司推出的ARM Cortex-M3為內核的32位微控制器STM32F103ZET6及其內置高速高性能外設實現對交流伺服電機的控制。STM32系列單片機實際上是一種高級單片機,集成度高,經濟性好,處理速度快,功耗低,使用方便,抗干擾能力強等特點,可實現伺服電機的準確平穩控制。
1 控制系統的體系結構及原理
本系統選用臺灣士林交流伺服電機,采用意法半導體公司推出的STM32F103ZET6為主控芯片,實現對伺服電機控制器的連接控制。伺服電機內部結構由定子、轉子、編碼器和外殼等組成。定子上的U/V/W三相電在伺服驅動器的控制下產生旋轉的電磁場,轉子是一個永磁體,在旋轉磁場作用下,轉子和磁場同步旋轉。同時電機尾部的編碼器反饋信號給伺服驅動器,驅動器對目標值和反饋值進行比較,產生偏差信號進而快速調控電機的運轉。本文提出的基于STM32的伺服電機控制體系結構框圖如圖1所示。
通過STM32F103ZET6單片機控制伺服驅動器實現對伺服電機的控制,由獨立鍵盤解碼可實現對伺服電機的啟動和停止。伺服電機的控制方式從外到內分別為位置控制,速度控制和轉矩控制。位置控制方面,由STM32F103ZET6單片機輸出兩路脈沖信號,然后送入伺服驅動器控制電機,由伺服電機里的編碼器產生的反饋信號送入伺服驅動器,根據反饋值和目標值的比較,調整伺服電機轉動的角度,實現伺服驅動器對伺服電機的閉環控制。位置控制精度取決于光電編碼器每轉產生的脈沖數控制,即伺服電機的精度是由編碼器的線數決定。速度控制方面,士林伺服電機有兩種速度輸入命令模式:一種是類比輸入,另一種是暫存器輸入,本系統采用類比輸入模式,外部單片機發出速度指令信號,經DA轉換后形成模擬量電壓信號實現對伺服電機的轉速的控制,10 V時電機速度最大,0 V時候最小,由速度環編碼器的反饋實現閉環控制。轉矩控制方面,經單片機發出轉矩控制指令經DA轉換后送入伺服驅動器CN1接線端,伺服驅動器依靠內部電流環實現閉環控制。編碼器分為絕對式光電編碼器和增量式光電編碼器,本系統采用的是2 500 ppr (10 000解析度)的增量式光電編碼器。一般來說,增量式光電編碼器輸出A、B兩相互差90°的脈沖信號(即所謂的兩組正交輸出信號),從而可方便地判斷出旋轉方向。同時還有用作參考零位的Z相標志(指示)脈沖信號,碼盤每旋轉一周,只發出一個標志信號。具有原理簡單,壽命長,分辨率高,抗干擾性強,可靠性高等優點。

圖1 控制系統體系結構框圖
2 伺服驅動器的控制結構
伺服系統一般采用電流環,速度環和位置環的三環控制結構,因為這樣可以獲得較好的動態跟蹤性能和抗負載干擾能力,其中電流環是矢量控制的核心,用來抑制電流擾動,保證系統的穩定性;速度環和位置環用來抑制速度波動,實現系統準確定位。伺服電機矢量控制系統結構[10]如圖2所示。
電流環是伺服系統的最內環,決定著系統響應速度和環內抗干擾能力。電流環的組成包括伺服電機電機繞組、逆變器、矢量控制器、電流控制器及電流檢測等環節,其目標在于使得伺服電機繞組中的電流信號準確迅速地跟隨電流指令。對電流環的控制過程分析,電流環控制結構如圖3所示。

圖2 伺服電機矢量控制系統結構圖
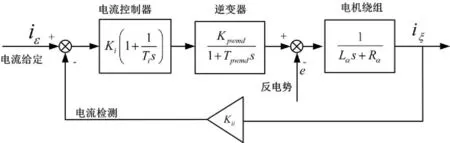
圖3 電流環的控制結構圖
其中Ki和Ti分別為電流環的比例增益和電流環積分時間常數,Kpwmd和Tpwmd分別為逆變器放大系數和逆變器時間常數,Lα和Rα分別是電機繞組電感和電阻,Kii為電流檢測反饋增益。
速度環建立在電流環之上,三環控制結構中的次內環,其作用是保證電機實際轉速和速度設定一致,盡可能消除負載對電機轉速的干擾。速度環由電機轉子、電流閉環、速度控制器和速度反饋模塊等環節組成,是實現動態跟蹤的重要環節,速度環控制結構如圖4所示。
其中Ks和Ts分別是速度控制器比例增益和速度控制器積分時間常數,Js和Bs分別為電機轉子及負載折合到電機軸上的總轉動慣量和負載折合摩擦系數,Kλ=KpwmdKiRαTi,Kt為轉矩常數,Kss為速度檢測反饋增益。

圖4 速度環的控制結構圖
位置環是三環控制中的最外環,是整個伺服系統穩定、高精度運行的重要環節。通過設定的目標位置與來自編碼器反饋的實際位置相比較,產生偏差后通過位置調節器產生速度指令。在位置伺服中一般避免出現超調和振蕩,位置環通常避免采用積分控制器。另外為改善伺服系統位置環的動態響應,可以增加復合前饋比例調節器作為位置控制器,這樣位置環校正成為典型的I型系統[11]。位置環控制結構如圖5所示。
圖5中Gff(s)是前饋環節的傳遞函數,Kp是位置環比例增益,Kλ和Tλ分別是速度環閉環等效比例增益和速度環閉環等效慣性時間常數,Kpp是位置檢測反饋增益。
位置環作為伺服控制系統的最外環,相比內部的電流環和速度環來說有相對長的控制周期,因此位置控制器除了可以于伺服驅動單元中構建,還可以通過上位控制器來實現,用具有更強數據處理能力的上位控制器如STM32、DSP等實現更加先進復雜優等的控制算法和路徑規劃。由上述分別建立起了三環串級控制結構圖,進而可分析其數學模型,為順利完成伺服控制系統參數自整定奠定了基礎。
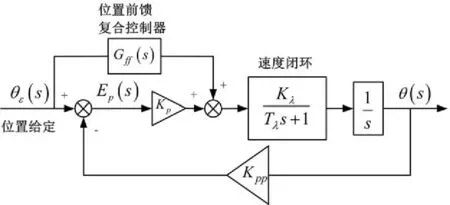
圖5 位置環的控制結構圖
3 控制系統的軟硬件設計
3.1單片機引腳電平轉換電路設計
控制系統的核心部件選用STM32系列的STM32F103ZET6微控制器,主頻可達72 MHz,片上集成64 kB的SRAM,512 kB的FLASH,2個基本定時器,4個通用定時器,2個高級定時器,3個SPI,2個I2C,5個串口,1個USB,1個CAN,3個12位的ADC,1個12位的DAC,1個SDIO接口,1個FSMC接口以及112個通用I/O口引腳。此芯片引腳電平為3.3 V而伺服電機信號電平為5 V,所以控制過程中需要加上信號電平轉換電路。圖6為所設計的雙向電平轉換電路圖,該電路設計思路簡單,實用方便,僅需3個電阻外加一個MOS管可以實現3.3 V和5 V之間的雙向電平轉換。

圖6 3.3 V和5 V電平轉換電路
S1端接STM32F103ZET6芯片的GPIO管腳(3.3 V電平信號),另一端S2接5 V電平信號,通過S2端接口實現對伺服電機驅動器的連接控制。STM32F103ZET6單片機的PD0和PD15引腳輸出兩路脈沖序列控制電機轉速和轉向。通過獨立鍵盤啟動鍵P1(PC0)和停止鍵P2(PC1)實現對伺服電機的啟動和停止。
3.2JATG接口電路設計
JATG接口主要實現向STM32芯片燒寫程序,并可在線仿真調試,進而可以更加方便快捷的完成電機控制算法的調試。其接口電路如圖7所示。
3.3串口通信電路設計
通信接口是現代設備系統的重要外部接口,同時也是軟件開發重要的調試手段,實現微控制器STM32與PC機之間的數據傳輸和信息處理。本系統采用RS232串口模塊實現與上位機PC之間的串口通信。電腦的COM口是標準RS-232接口,它的高電平定義為-12 V,而低電平定義為+12 V,故單片機的串口必須經過電平轉換才可以和標準RS-232通信,微控制器引腳電平是3.3 V的,3.3 V的轉換芯片一般是MAX3232或SP3232,而MAX3232價格相對較高,故選用SP3232電平轉換芯片。RS232串口電路如圖8所示。

圖7 JTAG接口電路

圖8 RS232串口電路
3.4伺服驅動器硬件連接
伺服電機選用的是臺灣士林的SMA-L040R30A型交流伺服電機,額定輸出功率為400 W,內置10 000解析度的增量式光電編碼器。伺服驅動器選用的是與伺服電機配套的SDB系列的交流伺服驅動器SDB-040A2。位置控制模式下,伺服驅動器接收單片機發出的位置信號指令,輸入的脈沖串經過電子齒輪分倍頻后,在偏壓計數器中與光電編碼器反饋回來的脈沖數比較進而形成偏差信號。位置偏差信號經位置反饋控制器調解后形成速度指令信號。速度指令信號與速度反饋信號比較后,形成偏差指令信號,經速度環比例積分器調解后,產生電流指令信號,在電流環中經矢量變換,從SPWM中輸出轉矩電流,控制電機運轉[7]。至此完成了從最外環的位置控制到最內環的轉矩控制整個過程。
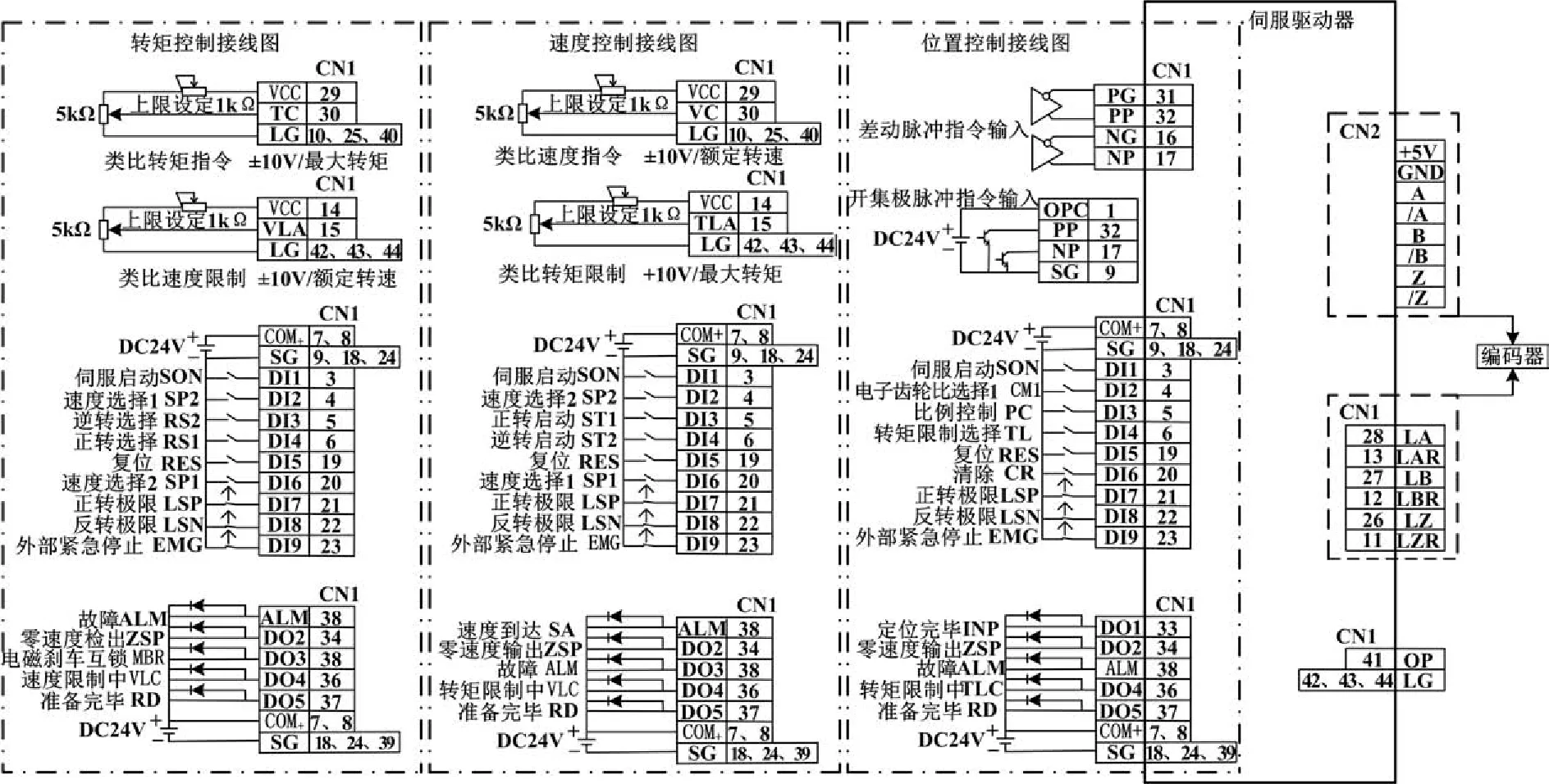
圖9 位置控制模式下電路連接圖
如圖9所示,位置控制模式下,驅動器指令輸入方式選擇以差動脈沖指令輸入,驅動器I/O連接器CN1上的引腳CN1-31/16作為外部位置控制信號的輸入端,可以接收單片機微控制器經差動驅動器發送過來的脈沖控制指令。7/8COM+數位電源都接外部直流電源的24 V正極;9/24/SG為數位電源地,3DI1數位輸入1,21/DI7為數位輸入7,22/DI8為數位輸入8,23/EMG為外部緊急停止,32/PP及17/NP都接24 V的負極;單片機輸出的兩路脈沖信號分別接31/PG和16/NG輸入脈沖波列。這樣就部分完成位置控制模式下的基本連線。
如圖9所示,速度控制方面,士林伺服電機速度命令輸入有兩種方式,本系統選擇外界類比速度指令輸入,即經由外界電壓來操控電機的轉速。伺服電機轉速的大小和所輸入的模擬量信號有關,所輸入的模擬量信號是-10 V~+10 V之間,10 V即為電機轉速的100%,0 V為電機轉速的0%,電機的內部速度選擇可由SP1和SP2的高低電平信號組合決定,正反轉可由正轉啟動ST1和逆轉啟動ST2的高低電平信號組合及模擬電壓的正負共同決定。速度處理的平滑處理方面可由速度的加/減速時間常數STA/STB和S型加減速時間常數STC來改善。
轉矩控制模式與速度控制模式類似,也屬外部類比信號輸入。轉矩控制常用在需要扭力控制的場合,比如繞線機、印刷機和射出成型機等。轉矩模式是由外部類比電壓±10 V作為轉矩命令,經AD轉換后,以參數下達類比命令轉矩最大輸出和轉矩限制漂移量等命令,即可實現預期的轉矩和速度。若參數PC13設定為100則電壓輸入為10 V時,其轉矩為最大轉矩的100%;輸入電壓為5 V時,則轉矩為最大轉矩的50%。至于轉矩命令漂移量和濾波常數分別由PC27和PC19來設定。
3.5伺服驅動器相關參數的設置
士林的驅動器根據安全性和使用頻度的考慮下,SDB-040A2伺服驅動器的參數可區分為基本參數、增益、濾波參數、擴展參數和輸入輸出設定參數,在出廠狀態下用戶可以修改基本參數,不能修改擴展參數。如有必要調整參數讀寫權限時,可以修改參數PA42的設定值,以便更改擴展參數的值。本伺服系統以位置控制方式為例,通過對參數的設置和調整,用戶既可改變伺服系統的功能和性質,同時又可觀察伺服電機的運行狀態。為保證系統按既定方式運行,需設置參數如下:
PA01:設為“0000”,即控制模式選擇位置控制模式,指令由外部信號控制;
PA02:設為“0002h”,即設置自動調諧模式1;
PA03:設為“0005h”,即自動調諧應答性響應設置為中應答性;
PA06:設為“1”,即設置電子齒輪比分子為1;當需要其他齒輪比分子時可通過參數PC32,PC33,PC34來設置;
PA07:設為“1”,即設置電子齒輪比分母為1;
PA13:設為“0020”,即設置正反轉脈沖串,正邏輯,AB相脈沖波列,最高脈沖頻率為200 kpps;
PB04:設為“3”,即設置位置命令濾波時間常數,可使得電機遇到較大的位置命令時運轉的更加平順。
其他參數暫時為缺省設置。
3.6系統軟件設計
針對STM32的這類高級單片機,ST公司推出了官方固件庫,固件庫把MCU中的寄存器的底層操作都封裝起來,提供了一整套接口(API)供開發者調用,這樣大大縮短了開發周期。本系統基于RVMDK開發平臺,充分利用標準外設固件庫,較方便的進行了軟件的設計,其中包括ADC初始化,系統時鐘初始化,串口初始化等環節。主程序流程圖如圖10所示。

圖10 主程序流程圖
本控制系統上位機(PC端)主要完成管理、顯示等工作,下位機(單片機)主要完成控制等功能,他們之間的通信由RS232串口實現,以下附上串口通訊部分程序代碼如下:
void uart_init(u32 bound)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockC?md(RCC_APB2Periph_USART1
|RCC_APB2Periph_GPIOA,ENABLE);
USART_DeInit(USART1);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; // PA.9
GPIO_InitStructure.GPIO_Speed= GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode= GPIO_Mode_AF_PP;
......
USART_InitStructure.USART_Mode= USART_Mode_Rx
|USART_Mode_Tx;//收發模式
USART_Init(USART1,&USART_InitStruc?ture); //初
始化串口
USART_ITConfig(USART1,USART_IT_RXNE,
ENABLE); //開啟中斷
USART_Cmd(USART1,ENABLE); //使能串口}
4 伺服電機控制實驗
LabVIEW是一種編程簡單,調試容易,庫函數豐富的圖形化編程語言,也稱G語言。采用LabVIEW軟件開發平臺可方便的進行電機控制上位機人機交互界面的設計,交互性強,界面良好,開發周期短,可實現交流伺服電機的啟動和停止,電機位置和速度的控制,數據的顯示、存儲和恢復等功能。圖11所示為設計的LabVIEW人機交互界面。
在進行實驗之前需對電機進行前期點動(JOG)運轉調試,由參數PC04設定JOG速度命令,PC01設定速度加速時間常數,PC02設定速度減速時間,回轉速度初期設定值為300 r/min,加減速時間常數設定為200。測試定位運轉時,通過士林通訊軟件選擇定位運轉測試選項,其初始值設定范圍見表1所示。

圖11 LabVIEW人機交互界面
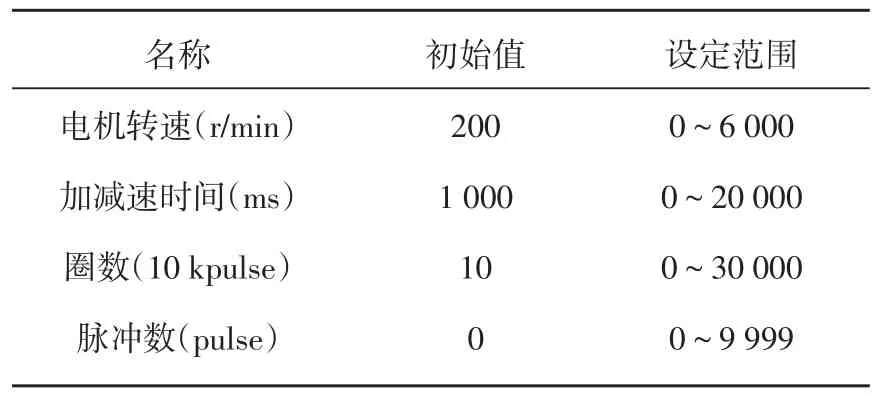
表1 測試定位運轉初始值設定及其范圍
手動模式調整增益方面,在位置與速度模式下,頻寬的選擇與機臺的剛性及環境有極大的影響,對于需求高精度的機臺就必需設定高頻率的系統響應,但設定的響應越高,機臺易引起共振。因此,需要高響應需求的場合就必需使用高剛性的機臺來避免機臺的共振。相關位置與速度控制場合設定參數如下:由PB03設定共振抑制低通濾波NLP為0,由PB05設定位置前饋增益值FFC為0,由PB07設定位置回路增益值PG1為35 rad/s,由PB08設定速度回路增益VG1為817 rad/s,由PB09設定速度積分增益值VIC設置為48 ms,由PB10設定速度前饋增益值為0。
位置控制模式實驗起初所用輸入信號模式為開集極脈沖指令輸入,但實驗調試過程中發現此種輸入模式存在所受外界干擾大,輸出脈沖數不均勻,穩定性差等問題,故最終選擇現在所用的差動脈沖指令輸入模式。從單片機輸出兩路脈沖序列信號,經RVMDK軟件仿真得到相位差為90度的A、B相兩路脈沖串序列,可由方波脈沖的輸入頻率改變轉速的大小,脈沖串序列圖如圖12所示。
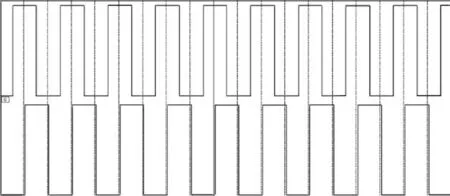
圖12 位置控制脈沖序列圖
速度控制方面,當外部類比速度命令輸入為0時電機可能存在offset,導致電機仍緩慢轉動,所以需進入電機診斷模式后選擇類比輸入自動off?set功能,自動調整電壓偏移量。手動模式下正確設定慣量比參數是充分發揮機械及伺服系統最佳效能的前提,在高速高精度伺服系統上表現尤為突出。傳動慣量對伺服系統的精度、穩定性和動態響應都有較大影響,故有必要進行電機慣量估測分析的運轉調試。調試過程如下:通過士林通訊軟件選擇“慣量估測分析”選項卡,按下“自動偵測慣量比”選項,若無報警再按“啟動伺服按鈕”此時電機已激磁,然后設定加減速常數為200,JOG速度為300后,按下“設定”按鈕,再按“啟動”按鈕,至此開始進行慣量估測分析運轉。驅動器自動估算目前的負載慣量比與頻寬,當相關參數計算完畢之后,需關掉“自動偵測慣量比”,方可寫入參數。

圖13 速度控制模擬量三角波信號圖
由單片機輸出速度指令信號經DA轉換之后送入伺服驅動器。根據速度模擬量信號實現伺服電機轉速的閉環控制。速度模擬量信號接CN1端子的VC端,10 V時候速度為額定速度的100%,0 V時候是額定速度的0%即速度為0。如圖13為輸入的三角波模擬量信號。
5 結論
本文基于STM32F103ZET6微控制器及其內部集成的ADC,DAC和RS232串口通信等模塊,利用自身所帶的標準固件庫函數,大大縮短開發周期,與傳統的單片機和PLC控制方案相比,本系統的外圍硬件電路設計簡單,成本低,實時性強,處理速度快,運行可靠,實現了良好的靜態精度和動態性能,滿足伺服電機控制系統的控制要求,具有一定的實用價值。
參考文獻:
[1]許建國.電機與控制[M].武漢:武漢測繪科技大學出版社,1998.
[2]Dietrich H.Naunin & Hans-Christian Reuss(1990). Synchronous Servo-Drive:A Compact Solution of Con?trol problems by Means of a Single-Chip Microcomputer. IEEE TRANSACTIONS ON INDUSTRY APPLICATION. VOL.26.NO.3,MAY/JUNE 1990,408-414.
[3]盧建剛,陳小飆. MinasA4系列交流伺服電機的PLC控制[J].微計算機息,2008(25):91-92.
[4]趙磊,王哈力,何緒鋒,等.基于單片機的交流伺服電機轉速控制系統研究[J].現代電子技術,2009(16):196-198.
[5]蔡志祥,劉冬生,曾曉雁.基于單片機的交流伺服電機控制系統[J].機械與電子,2005(05):28-30.
[6]孫克梅,滕金玉,張曉新,等.交流伺服電機的單片機控制及其應用[J].沈陽航空工業學院學報,2003(02):50-52.
[7]黃之然,劉爽,張強.基于單片機的伺服電機控制系統的研究[J].無線互聯科技,2012(12):104-105.
[8]李紅偉,胡濤,徐熙平,等.基于單片機的伺服電機控制系統的研究[J].長春理工大學學報:自然科學版,2012(01):116-118.
[9]張立麗,李亮,史小華.基于PIC芯片嵌入式電機控制器的研究[J].現代電子技術,2009(09):164-167.
[10]丁信忠.基于工業以太網的總線型交流伺服系統關鍵技術研究[D].濟南:山東大學,2012.
[11]劉輝.交流伺服系統及參數辨識算法研究[D].南京:南京航空航天大學,2005.
(編輯:向飛)
PTC LiveWorx中國2015年度大會:智能互聯助推物聯網轉型,實現數字與實體世界的融合
2015年11月3日,美國PTC公司(納斯達克:PTC)在北京成功舉辦了PTC LiveWorx中國2015大會。本次大會立足于產品開發、設計、服務與物聯網領域,分享并討論了PTC最新的公司戰略以及如何幫助客戶實現數字與實體世界的融合,進而推進業務轉型等議題。此外,PTC與合作伙伴展示了諸多成功案例讓與會者深入了解最新物聯網技術與PTC核心產品相結合所產生的巨大潛力,為國內制造業轉型及物聯網技術的深入應用和發展帶來極具意義的參考價值。本次大會吸引了1100多位觀眾參加,其中包括來自各個行業的產品開發人員、服務領域專家,以及物聯網專業人士等。
面對物聯網發展的新浪潮,PTC技術平臺市場營銷執行副總裁Charlie Ungashick在主題演講中表示,全球制造業如今正經歷著巨大變革。以前制造型企業一直處于把數字世界和實體世界分離的局面,現在制造業廠商正逐步通過物聯網將兩個世界進行融合。PTC所專注的就是搭建這樣一個橋梁,通過PTC的解決方案幫助制造商重新改進業務流程,布局智能互聯產品的開發和創新,抓住物聯網發展機遇,在物聯網時代贏得競爭優勢。
在活動現場,PTC展示了其增強現實技術的新應用,通過一輛智能自行車詮釋了PTC數字化映射(Digi?tal Twin)技術。該技術是將CAD設計軟件和ThingWorx物聯網平臺相結合的革新性突破,真正實現了數字世界與實體世界的融合。數字化映射(Digital Twin)通過將收集到的實體的幾何結構、特性、參數等信息,向用戶展示包括實體的數字模型、材料清單、服務數據、使用手冊,以及實體在不同情境中的行為反應等一系列物理性能。在此過程中,實體可以自動接收和發送數據,并可自發地進行數據分析。由此,用戶便可以真正有效管理產品的生命周期。
(來源:PTC公司)
The STM32 SCM Control System Design on Servo Motor Oriented
SANG Yong,LI Feng-tao,DAI Yue-bang,DUAN Fu-hai,WANG Ya-jie
(Mechanical Engineering School,Dalian University of Technology,Dalian 116024,China)
Abstract:The paper introduces a position,speed and torque control scheme of the ac servo motor based on the STM32F103ZET6 micro-controller. Software and hardware design of the control system,settings of debug parameters and control charts of the servo motor are completed. Human-machine interface (HMI) is designed by the LabVIEW graphical programming language. It has a friendly interface and strong interactions. Compared with the control schemes of traditional single chip microcomputer,the control system has advantages of good economy,fast processing speed,good real-timing,high integration and strong anti-interference performance etc. It can realize the accurate location and speed control of the ac servo motor well.
Key words:STM32;AC servo motor;position control;speed control;torque control
作者簡介:第一桑勇,男,1979年生,山東泰安人,博士后,副教授。研究領域:機電液一體化。已發表論文20篇。
收稿日期:2015-05-26
DOI:10. 3969 / j. issn. 1009-9492. 2015. 11. 019
中圖分類號:TP368.1
文獻標識碼:A
文章編號:1009-9492 ( 2015 ) 11-0065-08
