DC-32型搗固車加裝二維激光準直系統設計
2015-03-13 08:44:55王發燈牛懷軍
鐵道建筑 2015年9期
關 偉,王發燈,牛懷軍
(1.廣州鐵路(集團)公司 工務處,廣東 廣州 510095;2.中國鐵道科學研究院 鐵道建筑研究所,北京 100081)
DC-32型搗固車加裝二維激光準直系統設計
關 偉1,王發燈2,牛懷軍2
(1.廣州鐵路(集團)公司 工務處,廣東 廣州 510095;2.中國鐵道科學研究院 鐵道建筑研究所,北京 100081)
介紹了DC-32型搗固車激光準直系統的工作原理,分析激光準直系統在DC-32型搗固車上的使用情況,對現有的一維激光準直系統進行了改進設計,闡述了改進設計方案及軟硬件設計,并通過現場試驗驗證了二維激光準直功能達到設計要求,提高了搗固車作業效率。
搗固車 改造 二維激光準直系統 設計
1 概述
在我國大型養路機械中搗固車保有數量是最多的。我國引進的第一臺大型養路機械就是08-32型搗固車(國產化后為DC-32型)。搗固車通過對軌道進行撥道、起道抄平、石砟搗固及道床肩部石砟的夯實作業,使軌道方向、左右水平和前后高低均達到線路設計標準或線路修理規則的要求,從而改善線路條件,保障列車運行安全。
1.1 搗固車作業模式
搗固車的起撥道及搗固作業有4種作業模式:
1)搗固車利用自身檢測系統的測量弦作為基準線,將檢測到的信號值輸入到運放電路進行比較,再將偏差值輸出到伺服閥進行控制,修正線路幾何尺寸。
2)由工務段人員根據個人經驗指揮大型養路機械操作人員進行作業。
3)由工務段每隔2.5 m(5根軌枕)把線路方向、高低偏差值用油漆或粉筆標注在軌枕上,再由人工輸入起撥道數據,實現精確撥道。
4)利用搗固車配備的激光測量系統,通過激光發射和接收裝置,根據三點法作業原理對線路幾何尺寸進行測量,測量弦長度得到延長,激光發射器就相當于原來的D點測量小車,測量精度得到很大提高。
上述4種作業模式,第1種已經較少采用;第2種已經基本不用;第3種在新線建設時使用較多,在運營線路中使用較少;第4種在新線建設和線路的日常運營中使用較多。
DC-32搗固車激光準直作業目前僅限用于線路方向偏差的測量,而沒有針對線路高低的激光測量矯平系統。目前只能利用激光對長距離的線路方向偏差進行測量矯正,而無法對線路上存在的長距離高低偏差進行測量矯正。測量線路高低偏差的基準線仍然是張緊于B,D兩臺測量小車中間的兩根鋼弦線,基準長度只有15.785 m,對于長直線路其精度是遠遠不夠的,無法將距離較長的高低不良(俗稱慢塘)起平。
1.2 激光準直原理
目前DC-32型搗固車上安裝的激光準直系統為一維系統,如圖1所示。

圖1 JZT-B型激光準直系統
一維激光準直系統的工作原理為:定位在搗固車前方數百米處的激光發射器,向搗固車前端下方的激光接收器射出一束基準激光束,激光接收器將收到的光信號轉換成相應的電信號,經控制電路處理后,指導搗固車的撥道機構進行作業。當激光束準確對準接收器中央時,接收電路處于平衡狀態,無任何信號輸出,搗固車中位指示燈亮(遠距離時,由于激光束在空氣中會有規則漂移,搗固車的左右指示燈有節奏地交替閃爍)。當搗固車沿著左右彎曲的軌道前進,接收器隨之偏離激光束中心。這時接收器立即輸出左路或右路控制信號,通過接收控制電路板觸發接收跟蹤架的伺服電機啟動,驅動接收器向激光束中心移動,同時牽動位移傳感器,向搗固車撥道控制系統輸出相應的位移值,操縱撥道裝置將軌道撥至正確的位置。隨著搗
固車向前作業,激光接收器自動跟蹤基準激光束,撥道裝置相應動作,從而實現搗固車自動撥道的功能。
為了提高搗固車的作業效率,實現自動起撥道功能,需要對DC-32型搗固車上的激光電路系統進行升級改造。
2 加裝二維激光準直系統方案設計
由于二維激光準直系統在數據處理上與一維激光準直系統原理不同,需要對電氣系統進行改造設計。二維激光的撥道、起道值為模擬量,需要接入前端模擬輸入板合適位置。由于增加了起道功能,需要在前司機室合適位置內外各增加上、中、下指示燈,并且要設計能夠實現數據采集與輸出控制的電路板,實現正常的起撥道作業。為了實現直線與豎曲線作業模式的選擇,需要增加一個作業選擇開關。
2.1 前端模擬量輸入方案
搗固車上的手動起道量和手動撥道量為模擬量,通過手動起道碼盤和手動撥道碼盤調節滑線電阻,輸入前端模擬信號板。激光撥道量為模擬量值,通過激光撥道傳感器輸入前端模擬信號板。為了能夠實現改造后激光撥道、起道兩路模擬量數值的正常輸入,將原車激光撥道傳感器與4U5前端模擬量信號處理板的連線斷開,并將二維激光的撥道值輸出回路與10d連接。為了實現手動起道和激光起道數值通過一個通道進入4U5前端模擬量信號處理板,將手動起道碼盤與4U5電路板接線斷開。手動起道碼盤與新增指示燈控制板接線相連,激光起道輸出與4U5前端模擬量信號處理板20d相連。通過改造,能夠實現搗固車手動、手動加激光的不同作業模式。
2.2 作業模式選擇
為了實現激光光點和光條作業的不同需要,增加一個作業選擇開關。在直線段作業時,選擇“起撥道”,激光發射器發出光點信號,激光接收器輸出撥道和起道數值到前端模擬輸入系統。在豎曲線段作業時,選擇“只撥道”,激光發射器發出光條信號,激光接收器輸出撥道數值到前端模擬輸入系統。作業選擇開關選擇帶指示燈的開關,“起撥道”位指示燈滅,“只撥道”位指示燈亮。由于車載電源為直流24 V,故選用24 V的作業選擇開關。
2.3 外部指示燈選型
由于新增起道功能,需要在前司機室內外各新增上、中、下三個指示燈。由于車載電源為直流24 V,并參考原有撥道系統的指示燈,司機室內B4箱面板上的指示燈選用24 V二極管,司機室外對光指示燈選用24 V,8 W工作燈。
前端模擬改造后電氣系統原理如圖2所示。
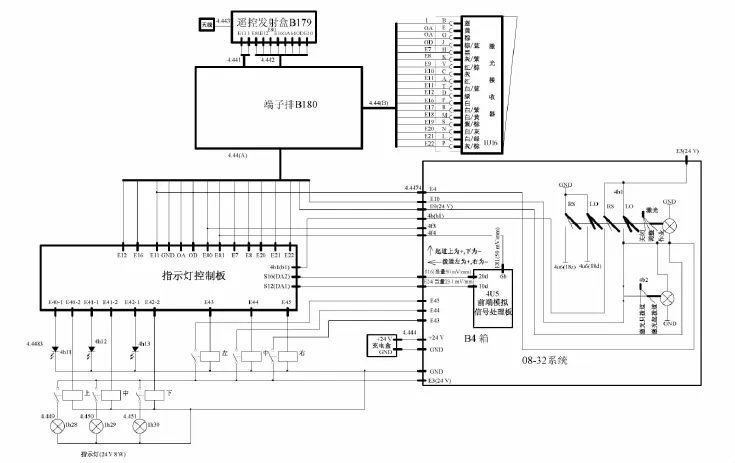
圖2 電氣系統改造原理
3 電路的硬件設計及濾波算法
3.1 硬件設計(圖3)
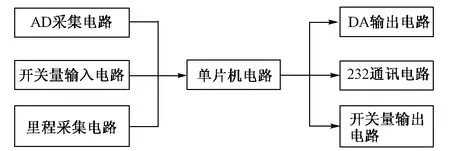
圖3 硬件設計
如圖3所示,系統電路共有8個子電路:①單片機。單片機作為控制核心,采用20 M晶振,另有1路指示燈用于指示系統是否正常工作。②232通訊。232通訊電路以MAX232芯片為核心,通過6N137實現信號隔離,再通過 74HC244實現信號遠程增大。③開關量輸入。系統具有6路24 V開關量輸入采集功能,通過TLP521-4芯片實現開關量信號隔離及信號電平轉換。④開關量輸出。系統具有8路24 V開關量輸出功能,通過繼電器實現開關量信號隔離及信號電平轉換。⑤模擬量采集。系統具有6路 ±10 V模擬量輸入采集功能,以芯片 AD7656為核心,通過LM747芯片實現模擬量信號濾波,再通過 OP37實現信號隔離。⑥模擬量輸出。系統具有4路 ±10 V模擬量輸出功能,以芯片MAX532為核心實現DA轉換,再通過OP177實現信號隔離輸出。⑦里程采集。系統具有1路里程脈沖信號采集功能,通過74HC244芯片實現里程信號增強及隔離輸入。⑧電源模塊。系統通過DC-DC轉換模塊實現電壓轉換,同時具有極性保護功能,防止接錯電源正負極。
3.2 軟件濾波及軟件設計
3.2.1 異常噪聲處理
由于整個系統的數據采集密度不需很大,2 Hz的采樣頻率就可以滿足規范要求。所以本系統測量單元的采樣頻率都比較低。因此,本文采用了3σ法則和滑動平均濾波的復合處理方式來剔除異常噪聲。
滑動平均濾波法把N個測量數據看成一個隊列,隊列的長度固定為N,每進行一次新的采樣,把測量結果放入隊尾,而去掉原來隊首的一個數據,這樣在隊列中始終有N個最新的數據。
應用3σ法則來剔除粗差。凡殘余誤差大于3倍標準差的都被認為是粗差,其所對應的測量值就是壞值,應予以舍棄。
如圖4所示,系統對接收器圖像信號(該數據樣本是在野外有大風的情況下采樣得到的)采用復合濾波技術進行處理后,噪聲得到了比較明顯的剔除,不但提高了系統測量精度,而且使遠距離測量時激光光束的穩定性得到了很好的控制,減少了由于空氣擾動給光束帶來的隨機誤差,延長了激光測量行程。
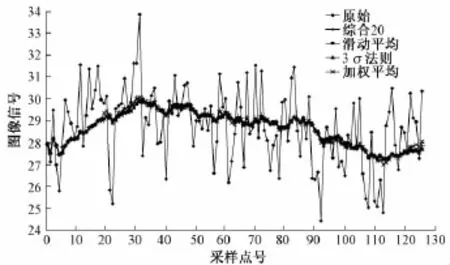
圖4 濾波處理前后數據對比
3.2.2 軟件設計
系統軟件設計流程圖如圖5所示。
4 試驗驗證
4.1 測試方案
1)開關量輸入輸出測試
開關量輸入測試可通過電路板上的指示燈來進行,通過給6路開關量輸入24 V高電平,若相應的指示燈會發光則認為開關量輸入正常。同樣地,通過單片機往外發出開關量輸出指令,若相應的繼電器會吸合則對應的指示燈也會點亮。
2)模擬量采集精度測試
AD芯片AD7656的量程設置為-10~+10 V,采集的數值0~32 767對應0~10 V;32 768~65 535對應-10~0 V。通過直流穩壓電源輸入特定電壓,然后根據單片機采集到的數據量換算為模擬量,比較輸入值和換算值可得到采集精度。
3)模擬量輸出精度測試
DA芯片MAX532可輸出-10~10 V范圍內的電壓,通過單片機設定輸出值,再利用萬用表測量實際輸出值,然后對輸出數據進行擬合,繼而修改單片機程序,可使輸出值更加接近設定值。擬合前后的效果如圖6所示。
4.2 現場試驗
二維激光準直系統現場試驗如圖7所示。DC-32型搗固車加裝二維激光自動起撥道系統后,作業效果良好,滿足現場需要,體現在:①作業時數值輸出穩定,參數顯示符合作業要求。②與整車兼容性好,沒有給其他系統帶來干擾。③能夠在直線段進行自動起撥道作業,減輕了操作人員的勞動強度。④作業完成后,采用其他設備對線路進行測量,線路不平順減小。
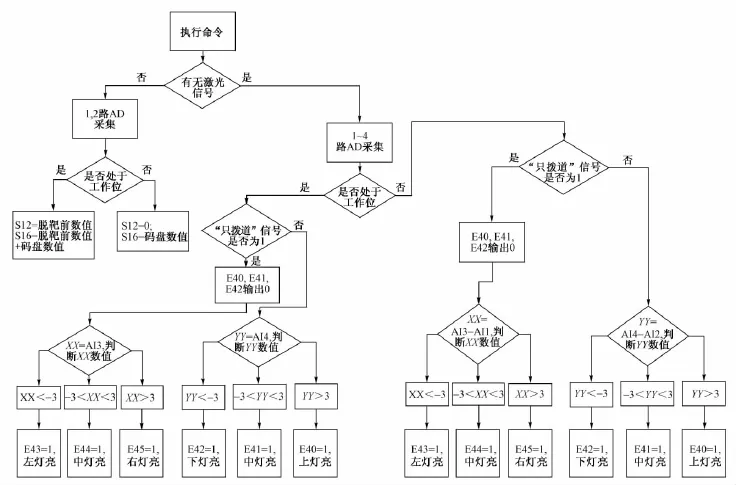
圖5 軟件設計流程
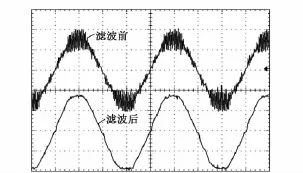
圖6 數字濾波前后效果對比

圖7 二維激光準直系統現場試驗
5 結語
對現有的DC-32型搗固車激光準直系統進行了分析,設計了加裝二維激光準直系統的改進方案,并研發了相關電路板,進行了試驗和性能檢測。現場試驗結果表明設計方案實現了DC-32型搗固車的二維激光準直功能,提高了線路作業質量。
[1]韓志青,唐定全.抄平起撥道搗固車[M].北京:中國鐵道出版社,2006.
[2]高春雷,王發燈,何國華.激光準直技術與鐵路線路測量[M].北京:中國鐵道出版社,2012.
[3]高春雷,王發燈.利用激光準直技術檢測線路的長波不平順[J].鐵道建筑,2009(1):81-85.
[4]湯國華.DWL-48連續式搗穩車激光抄平系統應用探討[J].上海鐵道科技,2009(3):8-9.
[5]王發燈,高春雷.兩維激光跟蹤系統在搗固車中的應用[J].鐵道建筑,2009(3):86-88.
[6]劉鐵軍.搗固車自動起撥道作業方法探討[J].鐵道建筑,2009(1):96-97.
[7]蔣剛.D09-32型連續式搗固車撥道原理分析[J].科學信息(學術研究),2008(7):107-109.
[8]占棟,陳唐龍,于龍,等.DCL-32連續式搗固車二維激光準直系統的研究與設計[J].鐵道建筑,2012(12):151-154.
[9]劉剛.搗固車起道、抄平原理分析[J].鐵道建筑,2009 (1):78-80.
[10]劉琪.激光準直系統在大型搗固車上的應用[J].甘肅科技,2011,27(7):69-72.
(責任審編 李付軍)
U216.63
:ADOI:10.3969/j.issn.1003-1995.2015.09.32
2015-04-06;
:2015-05-12
關偉(1969— ),男,湖南長沙人,工程師。
1003-1995(2015)09-0114-04
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
故事大王(2016年7期)2016-09-22 17:30:08
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25