海流對線導魚雷導引及作戰影響*
2015-03-14 11:03:32白東宇
艦船電子工程 2015年8期
白東宇 劉 煌
(海軍大連艦艇學院研究生管理大隊 大連 116018)
?
海流對線導魚雷導引及作戰影響*
白東宇 劉 煌
(海軍大連艦艇學院研究生管理大隊 大連 116018)
海流是常見的海洋環境要素之一,對線導魚雷導引及作戰產生的影響很大。論文利用Mtalab軟件結合線導魚雷導引規律,研究海流對魚雷發現目標的影響。主要從改變初始射距、作戰態勢和自導距離三種情況下,進行海流對線導魚雷影響的仿真分析。最后得出了海流與線導魚雷發現目標的相關結論。
線導魚雷; 海流; 概率; 導引模型
Class Number TJ63
1 引言
魚雷是由平臺在發現目標后發射入水,用以攻擊摧毀目標的水中武器,具有隱蔽性好、命中率高和破壞威力大等特點。魚雷在歷次戰爭中得到了大量使用,取得了顯著戰績,在第二次世界大戰中,魚雷擊沉了大約1450萬噸的運輸船,占被擊沉運輸船總噸位的68%;被魚雷擊沉的水面戰斗艦艇占到了總數的38%,達到了369艘。20世紀80年后,魚雷進入高速發展時期,成為融合精密機械、現代控制、微電子學、水聲學、水動力學等學科技術為一體的高科技產品,按照制導方式不同,可以分為直航魚雷、自導魚雷和線導魚雷等。
1.1 線導魚雷
線導魚雷是由潛艇或水面艦艇等發射平臺通過導線傳輸指令控制導向目標的魚雷。魚雷發射后,導線向發射平臺傳回自身的狀態、位置和目標的方位、距離等參數信息,發射平臺根據魚雷返回的信息發出遙控指令操縱魚雷攻擊目標。線導魚雷由導線傳輸指令,因而擁有較好的抗干擾能力,航速一般為35節~60節。線導魚雷具有捕捉目標概率高、發射迅速、抗干擾能力強、攻擊效果好和激動靈活等特點。
1.2 海流對魚雷產生的影響
海流是海洋環境要素之一,其大小和方向是隨機的,但是全球海洋的海流分布整體趨勢是一定。海洋環境對不同類型魚雷產生的影響也不同。對線導魚雷,主要是海流對其位置坐標的影響,魚雷位置坐標是利用雷速、航向和深度等參數綜合解算獲得,這些參數直接影響到坐標的精度[1]。主要表現在能使魚雷偏離預定航線,造成雷位偏差。在特定作戰情形下,如果無法提前獲得作戰海區海流的大小和方向,發射平臺解算的魚雷方位就會產生較大誤差,線導魚雷導引位置就會偏離預期,導致魚雷在線導段結束后自導裝置難以捕獲目標,從而影響魚雷作戰性能。
魚雷在靜止流場中運動時,存在著平衡攻角α0、平衡舵角σ0,當存在側向水平海流時,會產生側滑角β,產生新的誘導阻力系數,增加魚雷速度的誤差。魚雷位置方程:

(1)

(2)
vx=VTcosβ
(3)
vz=VTsinβ
(4)
式(1)中不計魚雷滾動且認為側滑角β為小量,略去高階微量后,可以得到魚雷位置累計誤差方程:
(5)
(6)
從式(2)中可以看出,魚雷位置的累計誤差主要受到航向和雷速影響,其中魚雷的速度是依靠推進器進速系數推算而得,在沒有海流的情況下具有較高的精度。但是魚雷無法感知側向水流,就會造成速度誤差的加大,長時間作用就會對作戰效果產生影響。
2 建立仿真模型
2.1 線導魚雷導引數學模型
線導魚雷的導引方法包括現在方位形心導引法、未來方位形心導引法、無干擾導引法等多種方法,本文仿真選用現在方位形心導引法,并且只考慮水平面內線導魚雷的捕獲情況。
以潛艇發射魚雷處為原點建立大地坐標系,X軸水平指向東,Y軸水平指向北,潛艇和目標連線與Y軸的夾角定義為目標方位角,順時針為正,角度為-180°~180°;潛艇和目標連線與目標速度方向的夾角定義為目標舷角,左舷為正,右舷為負,范圍-180°~180°。
在魚雷線導導引過程中,潛艇測出目標方位βwm,接收魚雷發回的遙測參數,解算出魚雷方位βT以及魚雷和潛艇之間的距離R,利用測出的目標方位及遙測參數解算并給出遙控魚雷轉角指令,使魚雷導引點在某一確定時間周期之后,處于潛艇和目標“現在”方位線上。在線導導引過程中,把魚雷自導扇面的形心作為導引點,使魚雷自導扇面的形心與目標相遇,提高發現目標的概率
2.2 導引公式
1) 初次導引公式
CT0=β0;XT0=0;YT0=0;XW0=0;YW0=0;Xm0=Dssinβ0;Ym0=Dscosβ0
初次導引公式是為潛艇、魚雷和目標的航向以及坐標賦予初始仿真數值。
2) 導引計算通式(i=1,2,3…)
魚雷在導引時間間隔內的航程:
STi-1=VTΔt
(7)
魚雷瞬時坐標:
XTi=XTi-1+STi-1sinCTi-1、
YTi=YTi-1+STi-1cosCTi-1
(8)
潛艇在導引時間間隔內的航程:
Swi-1=Vwi-1Δt
(9)
潛艇瞬時坐標:
Xwi=Xwi-1+Swi-1sinCwi-1
Ywi=Ywi-1+Swi-1cosCwi-1
(10)
潛艇與魚雷之間距離:
(11)
方位角:
(12)
方位角之差:
ηi=βTi-βi
(13)
相對舷角:
Qwi=βi-Cwi
(14)
相對距離:
(15)
相對夾角按公式:
(16)
魚雷至自導扇面形心的距離:
(17)
魚雷的瞬時航向:
CTi=Cwi+wi
(18)
目標瞬時坐標(假設目標作直線運動):
Xmi=Xmi-1+Vmi-1Δtsin(Qm-β0)
(19)
Ymi=Ymi-1+Vmi-1Δtcos(Qm-β0)
(20)
其中Qm為目標初始舷角
2.3 線導魚雷捕獲目標的判斷標準
魚雷與目標的相對距離按式(21)計算:
(21)
魚雷與目標的相對傾角按式(22)計算:
(22)
線導魚雷自導捕獲目標的判斷公式:
當D(i)≤r且|β(i)|≤λ′且∑STi≤LT時,捕獲目標;其他情況則未捕獲。
2.4 引入海流計算
2.4.1 計算方法
把魚雷當作質點,不考慮魚雷回旋時的動態過程,也忽略掉控制系統的動態過程,魚雷彈道為理論彈道。潛艇和目標均等速運動,不做規避機動。
以目標落在魚雷自導扇面內為線導導引魚雷發現目標的判定依據,采用蒙特卡洛法進行統計計算發現概率P。導引方法選擇“現在方位形心導引法”。在研究中,先不考慮海流的存在,只有潛艇測量目標的方位誤差情況下,計算發現概率;按照不同情況加入海流的影響,計算線導魚雷發現概率。
統計模擬法采用蒙特卡洛法,按照模擬精度要求給定模擬次數,統計出線導魚雷自導捕獲目標的次數,計算線導魚雷自導捕獲概率。
2.4.2 海流影響的處理方法
假定海流速度為常量,大小和方向保持不變只考慮水平面上,同時不考慮海流對潛艇和目標的影響。海流速度矢量和魚雷速度矢量之和即為影響后的魚雷實際速度,其大小和方向都會發生改變,進而改變每一個周期的魚雷實際位置。
實際魚雷速度,計算公式如下:
(23)
式中:vs為海流的流速(kn);vt為魚雷的速度(kn);Vts為水平面海流速度和魚雷速度的矢量和(kn);α為水平面海流速度矢量和魚雷速度矢量的夾角(rad)。
2.5 仿真計算
2.5.1 設定仿真初始計算條件
1) 海流大小設定為0.5kn~2kn,海流方向設定為正北;
2) 潛艇速度設定為6kn;潛艇航向設定為90°;初始方位角設定為30°;
3) 目標速度設定為18kn;目標舷角分別選取30°、60°和90°;
4) 魚雷速度設定為36kn;自導作用距離分別設定為800m和1200m;自導半扇面角設定為45°
5) 初始射距:30000m、35000m、40000m;方位測量均方差:0.4°、0.5°;
6) 魚類航程無限制;
7) 模擬共計次數:1000次。
2.5.2 仿真結果
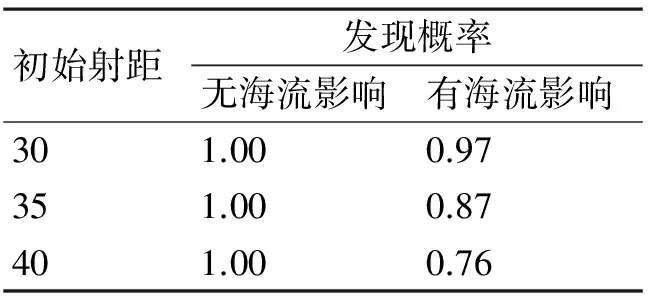
表1 改變射距條件下的發現概率
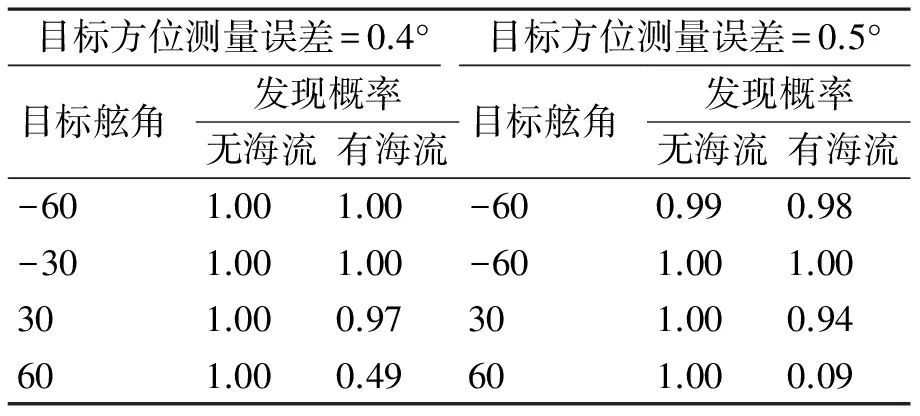
表1 給定海流大小,方向條件下的發現概率
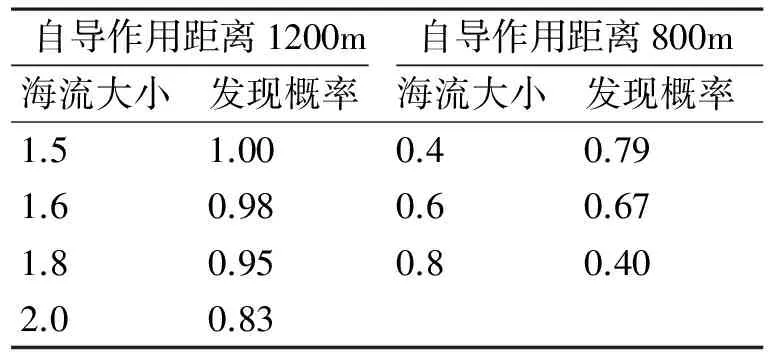
表3 給定作用距離,海流大小條件下的發現概率
3 結論分析
表1是在初始目標舷角為30°時得到的仿真結果,主要驗證有無海流是否會對魚雷導引結果產生影響。從表中可以明顯看出,當沒有海流影響時,線導魚雷始終可以發現目標。當存在側向海流時,發現目標的概率隨射距增加顯著降低。海流的影響逐漸加大,這也和隨著魚雷航程的加大、雷位漂移也越來越大是一致的。
從表2中可以看出,盡管目標方位測量誤差會對魚雷發現目標的概率產生一定影響,在不同作戰態勢下即改變目標舷角時,海流影響程度也并不相同。當初始射距為30000m,目標舷角為60°,海流大小為1.5kn時,線導導引彈道基本都發散了,即魚雷無法發現目標。即使海流大小降低到0.8kn,在這種態勢下,發現概率也只有0.49,海流的影響是十分巨大的。從仿真結果來看,潛艇在與發射線導魚雷時,應與目標舷角保持在30°范圍內才能擁有較高的命中率。
從表3中魚雷自導作用距離的變化,分析發現概率的變化。選取測量方位誤差為0.4°、初始目標舷角為30°、初始射距為30000m等情況分析,從表中可以看出,在自導作用距離增大到1200m時,保證發現概率不小于0.95的海流可以達到1.8kn,完全可以適應作戰海區的海洋環境條件。自導作用距離為800m,即使海流大小降低為0.4kn時,發現概率為0.79,難以滿足要求。所以當潛艇發射線導魚雷時,應選擇海流速度較小的作戰海區和與目標舷角較小的作戰時機,同時要進一步提高魚雷的自導搜索能力,才能擁有較高的命中率。
[1] 方書甲.海洋環境對海軍裝備性能的影響分析[J].艦船科學技術,2004(2):5-10.
[2] 田長錚.魚雷運動模型的建立與制導率的仿真[M].系統仿真技術及其應用,第十卷.
[3] 孫華春,李長文,李海玲.直航魚雷命中概率模型與仿真[J].艦船電子工程,2009(12):138-141.
[4] 吳朝暉,宋保維,梁慶衛.魚雷作戰效能分析方法論[J].火力與指揮控制,2006(10):33-36.
[5] 高洪林,馬亮,王新華.潛艇魚雷武器系統作戰效能分析[J].火力與指揮控制,2004(3):27-30.
[6] 宋保維,李楠,毛昭勇.模糊層次分析法在魚雷作戰效能評估中的應用[J].魚雷技術,2010(4):249-252.
[7] 田長錚,韓亮.魚雷運動模型的建立與制導率的仿真[C]//中國自動化學會系統仿真專業委員會、中國系統仿真學會仿真技術應用專業委員會.2008系統仿真技術及其應用學術會議論文集,中國自動化學會系統仿真專業委員會、中國系統仿真學會仿真技術應用專業委員會,2008:4.
[8] 陳建,張韌,李佳訊,等.海洋環境影響聲自導魚雷的彈道分析與動態仿真[J].火力與指揮控制,2012(8):54-57.
[9] 張國鋒,王明洲.海洋環境對聲自導魚雷的影響[J].艦船電子工程,2007(6):165-168,203.
[10] 董春鵬,石小龍.主動聲尾流自導魚雷導引彈道分析計算[J].魚雷技術,2007(2):19-23.
[11] 潘遜,張靜遠,張江.聲尾流自導魚雷導引策略仿真與優化[J].海軍工程大學學報,2012(3):98-102.
Influence of Ocean Currents on Wire-guided Torpedo Guidance and Battle Performance
BAI Dongyu LIU Huang
(Department of Graduate Management, Dalian Naval Academy, Dalian 116018)
Ocean currents is one of the common factors of marine environment, and causes serious influence on wire-guided torpedo. In this paper, the software Mtalab and Guidance law are used to find out the relationship between ocean currents and wire-guided torpedo. The simulation and analysis are conducted from three kinds of cases including changing the initial target distance, combat situation and action range of torpedo, finally the conclusion about the relationship between the current and detection probability is made.
wire-guided torpedo, ocean currents, probability, guidance methods
2015年2月7日,
2015年3月26日
白東宇,男,碩士研究生,研究方向:海戰場環境保障。劉煌,男,碩士研究生,研究方向:海洋空間環境遙感。
TJ63
10.3969/j.issn1672-9730.2015.08.037
