無人機(jī)對地面目標(biāo)定位的一種實(shí)現(xiàn)算法*
2015-03-14 09:26:25高進(jìn)濤郝旭東
艦船電子工程 2015年6期
高進(jìn)濤 郝旭東 金 朝
(中國洛陽電子裝備試驗(yàn)中心 洛陽 471003)
?
無人機(jī)對地面目標(biāo)定位的一種實(shí)現(xiàn)算法*
高進(jìn)濤 郝旭東 金 朝
(中國洛陽電子裝備試驗(yàn)中心 洛陽 471003)
無人機(jī)使用WGS-84坐標(biāo)系對地面目標(biāo)進(jìn)行定位,為解決無人機(jī)坐標(biāo)系與大地坐標(biāo)系之間的換算問題,需要將WGS-84坐標(biāo)系換算為BJ-54大地坐標(biāo)系,論文闡述了無人機(jī)對地面目標(biāo)的定位過程,并詳細(xì)介紹了目標(biāo)從無人機(jī)坐標(biāo)系到大地坐標(biāo)系的坐標(biāo)變換,實(shí)現(xiàn)了無人機(jī)對地面目標(biāo)的坐標(biāo)解算。
無人機(jī); 坐標(biāo)系; 變換矩陣
Class Number V279
1 引言
無人機(jī)使用GPS系統(tǒng)進(jìn)行導(dǎo)航定位,GPS系統(tǒng)具有全球性、全能性、全天候、連續(xù)性和實(shí)時(shí)性的導(dǎo)航、定位和定時(shí)功能,能為無人機(jī)提供精密的三維坐標(biāo)、速度,該系統(tǒng)所采用的是美國國防部1984年推出的全球大地坐標(biāo)系[1~2]。
在無人機(jī)對目標(biāo)進(jìn)行定位的過程中,得到的是目標(biāo)相對于無人機(jī)的坐標(biāo),無人機(jī)的坐標(biāo)用WGS-84坐標(biāo)系表示,而我國現(xiàn)行廣泛使用的是1954年北京坐標(biāo)系[3~4]。該坐標(biāo)系屬于參心大地坐標(biāo),采用克拉索夫斯基橢球參數(shù)[5]。WGS-84地心坐標(biāo)和BJ-54參心坐標(biāo)系在空間的定位與定向、橢球體的參數(shù)均不一樣[6],使得地面同一點(diǎn)在這兩種坐標(biāo)系中的坐標(biāo)量值不同。這就產(chǎn)生了坐標(biāo)之間的換算問題,需要將目標(biāo)在無人機(jī)當(dāng)?shù)厮阶鴺?biāo)系中的坐標(biāo)換算到BJ-54大地坐標(biāo)系中去。
2 無人機(jī)對目標(biāo)的定位
2.1 坐標(biāo)系的定義
在無人機(jī)對目標(biāo)定位的過程中需要建立和用到以下幾個(gè)坐標(biāo)系:
1) 無人機(jī)航跡坐標(biāo)系:原點(diǎn)取在無人機(jī)質(zhì)心上,B1軸定為無人機(jī)航向,B3指為天頂,B2與B1和B3形成右手直角坐標(biāo)系。
2) 無人機(jī)坐標(biāo)系:考慮無人機(jī)的三軸姿態(tài)角(無人機(jī)坐標(biāo)系相對于無人機(jī)航跡坐標(biāo)系的三軸姿態(tài)角)所建立的坐標(biāo)系,三軸姿態(tài)角分別為偏航角β,俯仰角α,橫滾角ν。坐標(biāo)原點(diǎn)與無人機(jī)航跡坐標(biāo)系相同,主要通過無人機(jī)航跡坐標(biāo)系分別繞三軸進(jìn)行姿態(tài)角旋轉(zhuǎn)得到。
3) 無人機(jī)當(dāng)?shù)厮阶鴺?biāo)系:原點(diǎn)設(shè)在無人機(jī)質(zhì)心上,C1指向正北方向,C3指向天頂,C2與C1和C3形成右手坐標(biāo)系。
4) WGS-84世界大地坐標(biāo)系[7]:坐標(biāo)原點(diǎn)為地球質(zhì)心,Z軸指向BIH1984.0協(xié)議地極CTP,X軸指向BIH1984.0的零子午面與CTP赤道的交點(diǎn),Y軸與X軸、Z軸形成右手坐標(biāo)系。
WGS-84大地坐標(biāo)系的橢圓參數(shù)為
· 長半軸:a=6378137±2m;
· 地球引力常數(shù):Gm=3986005×108m3/s2±0.6×108m3/s2;
· 地球角速度:ω=7292115×10-11rad/s±0.15×10-11rad/s;
· 協(xié)議地球扁率:f=1:298.257223563。
5) BJ-54大地坐標(biāo)系:BJ-54是我國廣泛應(yīng)用的一個(gè)參心坐標(biāo)系,它的短軸Z軸平行于地球質(zhì)心指向地極的方向,大地起始子午面平行于格林尼治子午面;X軸在大地起始子午面內(nèi),與Z軸垂直,指向經(jīng)度0;Y軸與ZOX構(gòu)成右手坐標(biāo)系[8]。
該坐標(biāo)系采用的地球橢球?yàn)榭死鞣蛩够鶛E球,其幾何參數(shù)為
· 長半軸:a=6378245m;
· 扁率:f=1:298.3;
· 第一偏心率:e2=2f-f2=0.0069342162297。
2.2 無人機(jī)對目標(biāo)定位過程
利用無人機(jī)對目標(biāo)進(jìn)行定位時(shí),其一般過程為:
1) 地面控制、處理設(shè)備通過上行線路遙控?zé)o人機(jī)飛行至目標(biāo)上方空域,獲取目標(biāo)實(shí)時(shí)電視數(shù)字圖像并通過下行線路傳送回?zé)o人機(jī)地面控制、處理設(shè)備進(jìn)行處理。
2) 目標(biāo)定位模型根據(jù)目標(biāo)圖像的像點(diǎn)位置和導(dǎo)航任務(wù)設(shè)備參數(shù)計(jì)算出目標(biāo)在無人機(jī)航跡坐標(biāo)系和無人機(jī)當(dāng)?shù)厮阶鴺?biāo)系中的坐標(biāo)。
3) 因無人機(jī)坐標(biāo)是用GPS-84坐標(biāo)系表示的,故要利用無人機(jī)當(dāng)?shù)厮阶鴺?biāo)系與WGS-84坐標(biāo)系的關(guān)系計(jì)算它們之間的轉(zhuǎn)換矩陣,求解目標(biāo)在WGS-84空間坐標(biāo)系中的坐標(biāo)。
4) 根據(jù)空間直角坐標(biāo)與大地坐標(biāo)的關(guān)系,求解目標(biāo)在WGS-84大地坐標(biāo)系中的坐標(biāo)。
5) 根據(jù)不同空間大地直角坐標(biāo)系的轉(zhuǎn)換關(guān)系,求解目標(biāo)在BJ-84大地坐標(biāo)系中的坐標(biāo),最后通過此坐標(biāo)求解所需要的目標(biāo)在BJ-84空間直角坐標(biāo)系中的位置,實(shí)現(xiàn)無人機(jī)對目標(biāo)的定位的坐標(biāo)解算。
3 坐標(biāo)變換
無人機(jī)對目標(biāo)定位的坐標(biāo)轉(zhuǎn)換過程可用圖1表示。

圖1 目標(biāo)定位坐標(biāo)轉(zhuǎn)換關(guān)系
3.1 目標(biāo)位置從無人機(jī)坐標(biāo)系到無人機(jī)航跡坐標(biāo)系的坐標(biāo)變換
用一個(gè)(n+1)維分量來表示一個(gè)n維的分量的方法稱為“齊次坐標(biāo)表示法”[9~10]。例如,把三維空間的坐標(biāo)(x,y,z)表示成齊次坐標(biāo)為(Wx,Wy,Wz,W)。它們之間的關(guān)系為
故目標(biāo)位置P點(diǎn)在無人機(jī)坐標(biāo)系中的直角坐標(biāo)可以表示為
Ap=[Ax,Ay,Az,1]T
(1)
其中Ax,Ay,Az是目標(biāo)在無人機(jī)坐標(biāo)系的位置。
當(dāng)無三軸姿態(tài)角時(shí),無人機(jī)坐標(biāo)系與無人機(jī)航跡坐標(biāo)系重合,考慮無人機(jī)機(jī)體的三軸姿態(tài)角(偏航角β,俯仰角α,橫滾角ν),目標(biāo)位置從無人機(jī)坐標(biāo)系到無人機(jī)航跡坐標(biāo)系的坐標(biāo)為
Bp=M1·M2·M3·Ap
(2)
式中,M1為俯仰角α(繞A2軸旋轉(zhuǎn)α)的變換矩陣,M2為橫滾角ν(繞A1軸旋轉(zhuǎn)ν)的變換矩陣,M3為偏航角β(繞A3軸旋轉(zhuǎn)β)的變換矩陣,分別為
其中A1,A2,A3分別為無人機(jī)坐標(biāo)系的三個(gè)坐標(biāo)軸。
3.2 目標(biāo)位置從無人機(jī)航跡坐標(biāo)系到無人機(jī)當(dāng)?shù)厮阶鴺?biāo)系的坐標(biāo)變換
只需要繞B3旋轉(zhuǎn)ε角即可,旋轉(zhuǎn)矩陣為
故目標(biāo)在無人機(jī)當(dāng)?shù)刈鴺?biāo)系中的位置為
Cp=M4·Bp
(3)
3.3 目標(biāo)位置從無人機(jī)當(dāng)?shù)厮阶鴺?biāo)系到WGS-84地心空間直角坐標(biāo)系的坐標(biāo)變換
無人機(jī)在地心坐標(biāo)系中的坐標(biāo)為(L,B,H),其中L為無人機(jī)所在位置的大地經(jīng)度,B為大地緯度,H為大地高程。
現(xiàn)將目標(biāo)從無人機(jī)當(dāng)?shù)刈鴺?biāo)系變換到WGS-84地心空間直角坐標(biāo)系,需要進(jìn)行坐標(biāo)軸的旋轉(zhuǎn)和平移。旋轉(zhuǎn)矩陣為
現(xiàn)將目標(biāo)從無人機(jī)當(dāng)?shù)刈鴺?biāo)系變換到WGS-84地心空間直角坐標(biāo)系,需要進(jìn)行坐標(biāo)軸的旋轉(zhuǎn)和平移.旋轉(zhuǎn)矩陣為
式中的矩陣分別表示繞C1軸旋轉(zhuǎn)角度-B,繞C2軸旋轉(zhuǎn)角度-L。
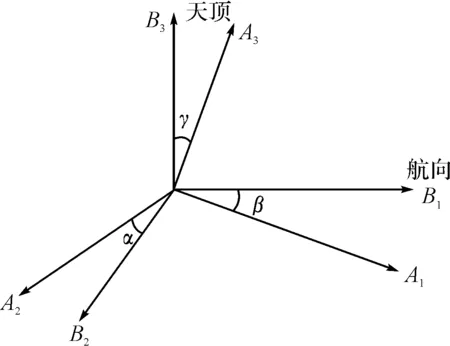
圖2 無人機(jī)坐標(biāo)系與無人機(jī)航跡坐標(biāo)系的關(guān)系
空間大地直角坐標(biāo)與大地坐標(biāo)的關(guān)系為
式中N為橢球卯酉圈曲率半徑,e為橢球第一偏心率,分別為
故目標(biāo)從無人機(jī)坐標(biāo)系變換到WGS-84地心直角坐標(biāo)系后的位置為
Dp=M5·Cp+[ABC0]T
(4)
其中,A=(N+H)cosBcosL;
B=(N+H)cosBsinL;
C=[N(1-e2)+H]sinB。
3.4 WGS-84空間坐標(biāo)系到BJ-54空間坐標(biāo)系的坐標(biāo)變換
兩個(gè)空間大地直角坐標(biāo)系間除了三個(gè)平移參數(shù)外,當(dāng)各坐標(biāo)系間相互不平行時(shí),還存在三個(gè)歐勒角,稱之為三個(gè)旋轉(zhuǎn)參數(shù),又兩個(gè)坐標(biāo)尺度不完全一致,從而還有一個(gè)尺度變化參數(shù),共七個(gè)參數(shù)。我們采用七參數(shù)轉(zhuǎn)換模型中的布爾沙公式,得到目標(biāo)在BJ-54空間坐標(biāo)系中的位置為
(5)
式中,ΔX0,ΔY0,ΔZ0為三個(gè)坐標(biāo)軸平移參數(shù);εX,εY,εZ為三個(gè)坐標(biāo)軸旋轉(zhuǎn)參數(shù);m為尺度變化參數(shù),將式(4)代入式(5)計(jì)算得到目標(biāo)在BJ-54空間坐標(biāo)系中的坐標(biāo)(X,Y,Z)。
3.5 BJ-54空間坐標(biāo)系到BJ-54大地坐標(biāo)系的坐標(biāo)變換
空間坐標(biāo)系到大地坐標(biāo)系的換算公式為
(6)
各參數(shù)含義在前面已注明,在計(jì)算時(shí),需要采用迭代法計(jì)算。迭代時(shí)先設(shè)定B的初值B(0),計(jì)算
(7)
(8)
然后,計(jì)算B的更新值
(9)
比較B(1)和B(0)是否在允許的誤差范圍內(nèi),如果在則結(jié)束,否則以B(1)為初值繼續(xù)進(jìn)行迭代計(jì)算,直到B(n)與B(n-1)在允許的范圍內(nèi)相等時(shí)結(jié)束,最終計(jì)算出大地坐標(biāo)(L,B,H)。
4 結(jié)語
本文對對無人機(jī)對地面目標(biāo)定位中的坐標(biāo)變換進(jìn)行了詳細(xì)的介紹,最終將目標(biāo)從無人機(jī)坐標(biāo)系轉(zhuǎn)換到我國廣泛運(yùn)用的BJ-54大地坐標(biāo)系中,實(shí)現(xiàn)了無人機(jī)對目標(biāo)的定位.從公式的推導(dǎo)上看,坐標(biāo)變換的計(jì)算量比較大,部分求解過程在不影響精度的前提下可以進(jìn)行計(jì)算上的優(yōu)化。另外,為提高坐標(biāo)變換精度,有時(shí)要考慮坐標(biāo)變換的誤差,當(dāng)然這需要在預(yù)先分析可能產(chǎn)生誤差的地方和大小的基礎(chǔ)上將誤差引入坐標(biāo)變換中。
[1] Dr. Carl Christian Liebe. Star Trackers for Attitude Determination[J]. IEEE AES System Maganize, June,1995:1-4.
[2] Curtis Padgett A Grid Algorithm for Autonomous Star Identification[M]. IEEE Transactions on aerospace and electronic systems,1997,33(1):202-212.
[3] 馬志強(qiáng),郭福生,陳良.靶場大地測量[M].北京:國防工業(yè)出版社,2004,10:23-25.
[4] 楊玉華,郭圣權(quán).WGS-84坐標(biāo)與BJ-54坐標(biāo)之間的轉(zhuǎn)換問題[J].科技情報(bào)開發(fā)與經(jīng)濟(jì),2004,3:12-13.
[5] 劉真.基于天文導(dǎo)航的無人機(jī)定位方法研究[D].西安:西安電子科技大學(xué)碩士學(xué)位論文,2009,3:15-18.
[6] 何炬.國外天文導(dǎo)航技術(shù)發(fā)展綜述[J].艦船科學(xué)技術(shù),2005,27(5):1-2.
[7] 張楠.高空長航時(shí)無人機(jī)組合導(dǎo)航系統(tǒng)研究[D].西安:西北工業(yè)大學(xué)碩士學(xué)位論文,2006,3:1-5.
[8] 房建成,寧曉琳.天文導(dǎo)航原理及應(yīng)用[M].第一版.北京:北京航空航天大學(xué)出版社,2006,10:295-297.
[9] 苗永寬.球面天文學(xué)[M].北京:科學(xué)出版社,1983:66-68.
[10] 王安國.現(xiàn)代天文導(dǎo)航及其關(guān)鍵技術(shù)[J].電子學(xué)報(bào),2007,35(12):1-3.
An Coordinate Transformation Arithmetic about UAV for Target Orientation
GAO Jintao HAO Xudong JIN Zhao
(Luoyang Electronic Equipment Test Center, Luoyang 471003)
The UAV takes WGS-84 system to locate ground target, for the sake of transformation between UAV coordinate system and geocentric coordinate system, it’s required to make transform from WGS-84 to BJ-54 coordinate system. this paper expatiates the Orientation course of ground target about UAV, introduces the coordinate transformation from UAV coordinate system to geocentric coordinate system, accomplishes the UAV coordinate transformation of geocentric coordinate system for target.
coordinate, coordinate system, transformation matrix
2014年12月9日,
2015年1月27日
高進(jìn)濤,男,碩士,工程師,研究方向:雷達(dá)效能評(píng)估。
V279
10.3969/j.issn1672-9730.2015.06.014
