基于GO-FMEA法的遠程火箭炮隨動系統故障診斷*
2015-03-14 09:26:30盛敏軍
艦船電子工程 2015年6期
盛敏軍
(陸軍軍官學院 合肥 230031)
?
基于GO-FMEA法的遠程火箭炮隨動系統故障診斷*
盛敏軍
(陸軍軍官學院 合肥 230031)
針對遠程火箭炮隨動系統故障診斷復雜和時序性要求高等問題,論文引入GO法分析其可靠性,得到模塊故障概率。根據模塊故障概率值大小,優先利用FMEA法建立故障字典,對模塊故障進一步分析,確定檢測順序。兩種方法綜合使用,優化了故障分析流程,提高故障診斷效率。
隨動系統; 故障診斷; GO法; FMEA法
Class Number TJ393
1 引言
遠程火箭炮隨動系統是其實現自動化操瞄的關鍵部件。其性能直接影響到武器系統的射擊密集度和射擊準確度。該隨動系統由17個部件組成,結構復雜,是典型機、電和液組合的復雜裝備。快速準確的故障診斷與維修是保證其有效工作的重要內容。現有故障樹分析法對故障進行分析[1],其工作量大,表達復雜,GO法是以成功為導向的系統可靠性概率分析技術,適用于多狀態和有時序系統的可靠性分析[2]。運用GO法和FMEA法[3]這兩種方法逐層分析,可優化診斷流程,即利用GO法分析系統模塊故障定量值,確定模塊故障可能順序;利用FMEA分析模塊故障原因。
2 隨動系統可靠性
GO法是一種系統可靠性的分析方法,它的分析過程是從輸入事件開始,經過一個GO模型的計算確定系統的最終概率。GO法的發展是基于決策樹理論,它的基本思想是把系統原理圖、流程圖或工程圖直接按一定規則翻譯成GO圖。GO圖的建立過程是用GO操作符去代替具體的部件;用信號流連接操作符,代表具體的物流。
2.1 電氣伺服系統工作原理
電氣伺服系統接收火控計算機發出的方位指令諸元,自動求取諸元與火箭炮方向實際間的誤差、控制規律計算與D/A轉換,經過擴大機,控制直流電動機帶動方向機構,實現火箭炮方向調炮,原理圖如圖1所示。
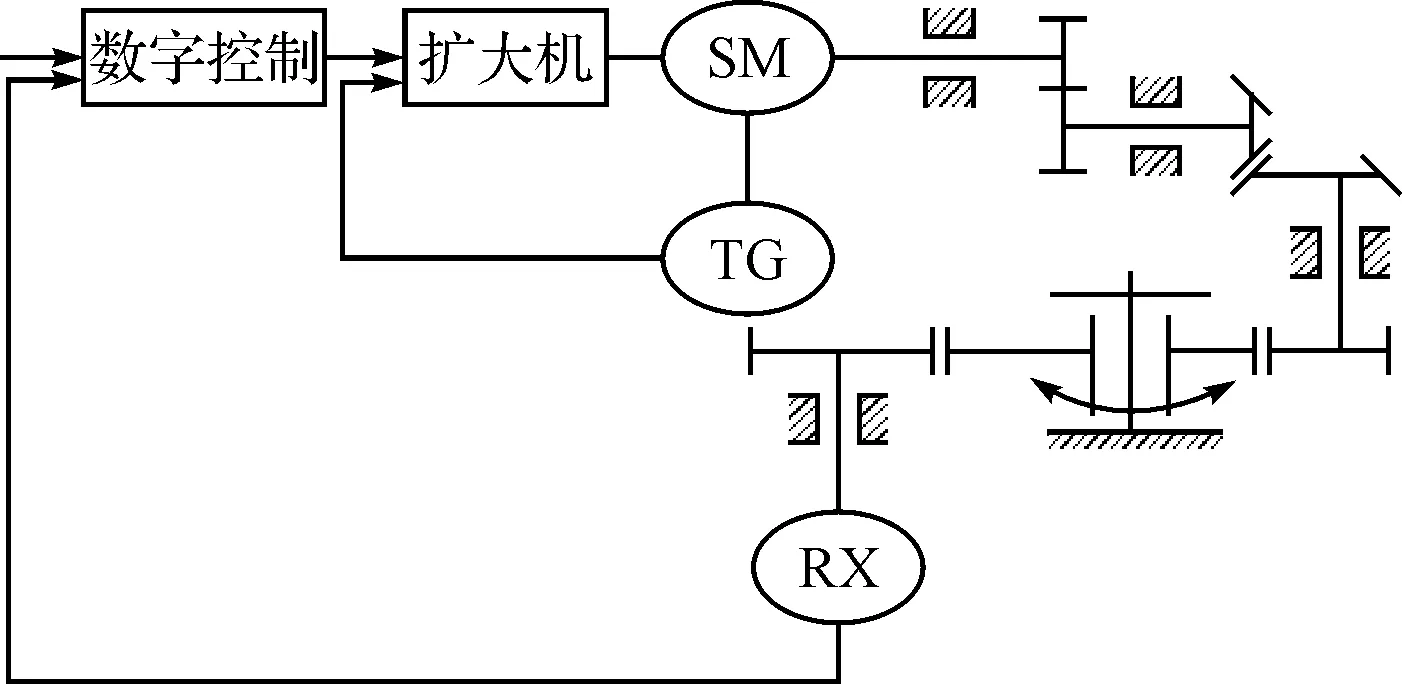
圖1 隨動系統工作原理圖
2.2 電氣伺服系統GO圖
從工作原理圖,可以看出隨動系統的信號流是有循環的,考慮到當前操作符不能分析閉環系統,針對此類情況,按照GO法基本原理,建立閉環系統的操作符,定義為第18類操作符C[4]。模型如圖2所示。
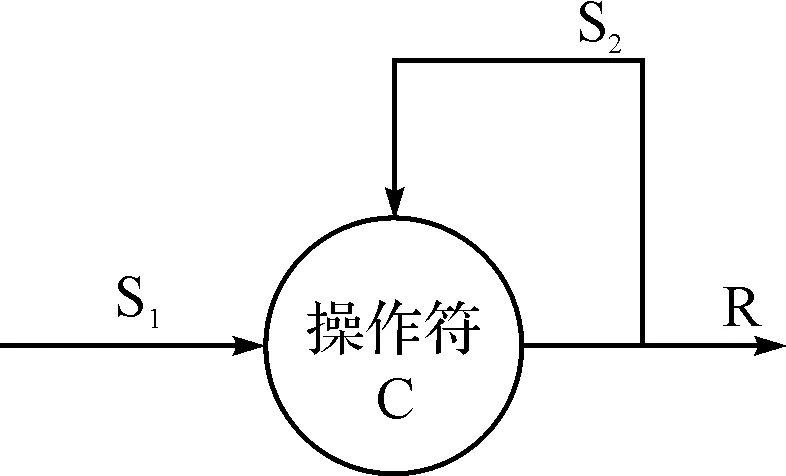
圖2 GO模型圖
該模型的基本狀態可描述為輸入信號S1正常,操作符C正常時,輸出信號R正常;當輸入信號S1和操作符有一個或一個以上故障時,輸出信號R就為故障。由第18類操作符C考慮反饋元件,建立如圖3等效模型,等效操作符Cd工作狀態描述為操作符C和反饋回路控制器操作符同時為正常時,等效閉環回路操作符Cd為正常;兩個操作符有一個或一個以上為故障時,等效操作符就為故障,等效后模型同閉環系統一致。
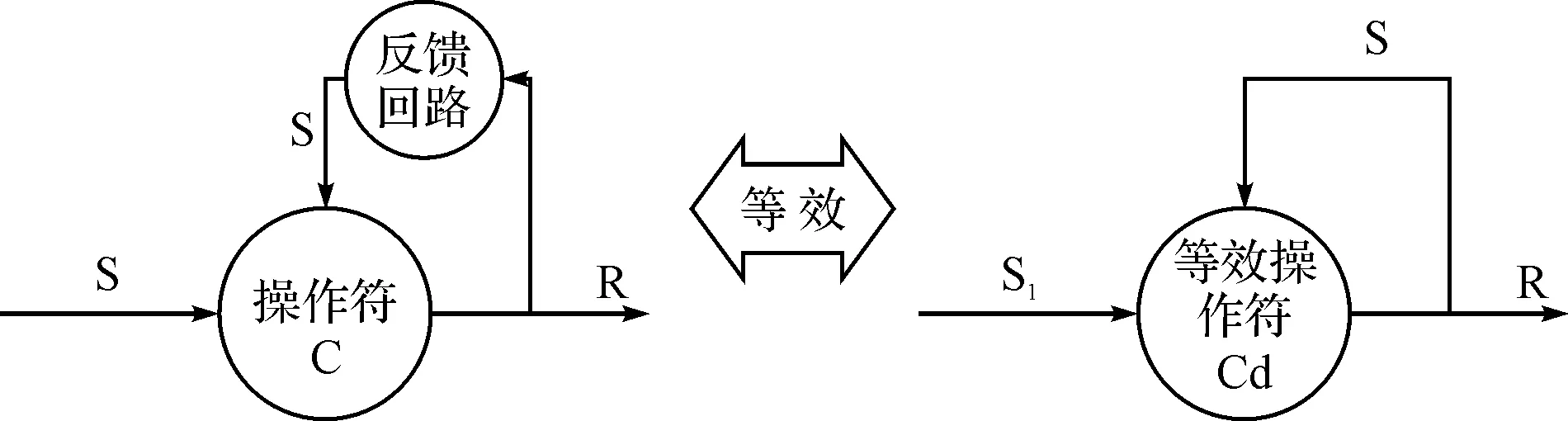
圖3 等效轉換
據此,根據系統原理圖,定義其操作符數據如表1所示。
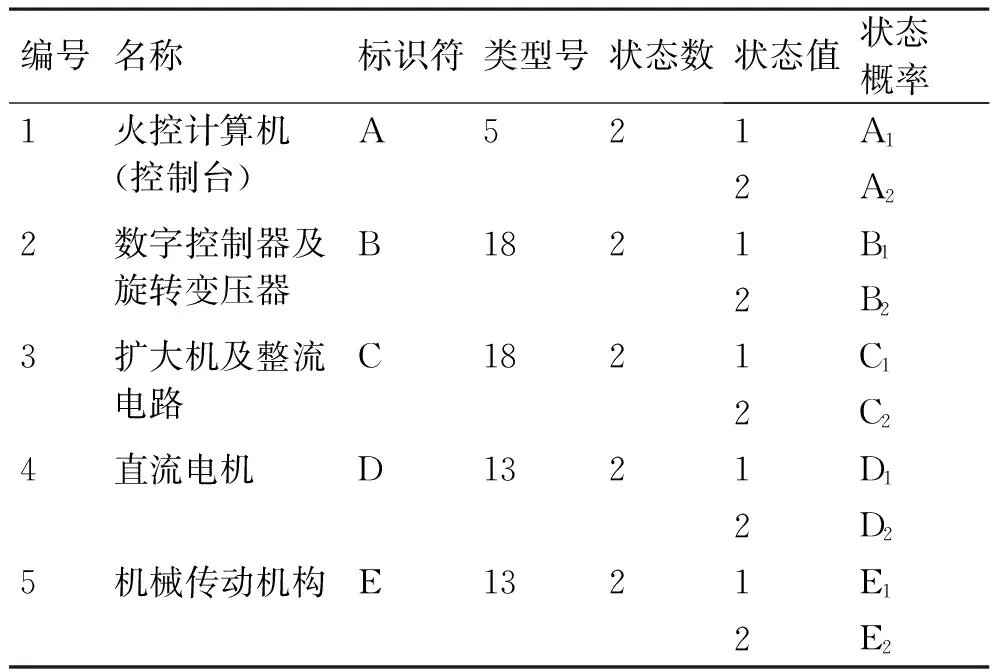
表1 電氣伺服系統操作符數據
根據表1構建電氣伺服隨動系統GO圖。

圖4 電氣伺服隨動系統GO圖
2.3 GO運算

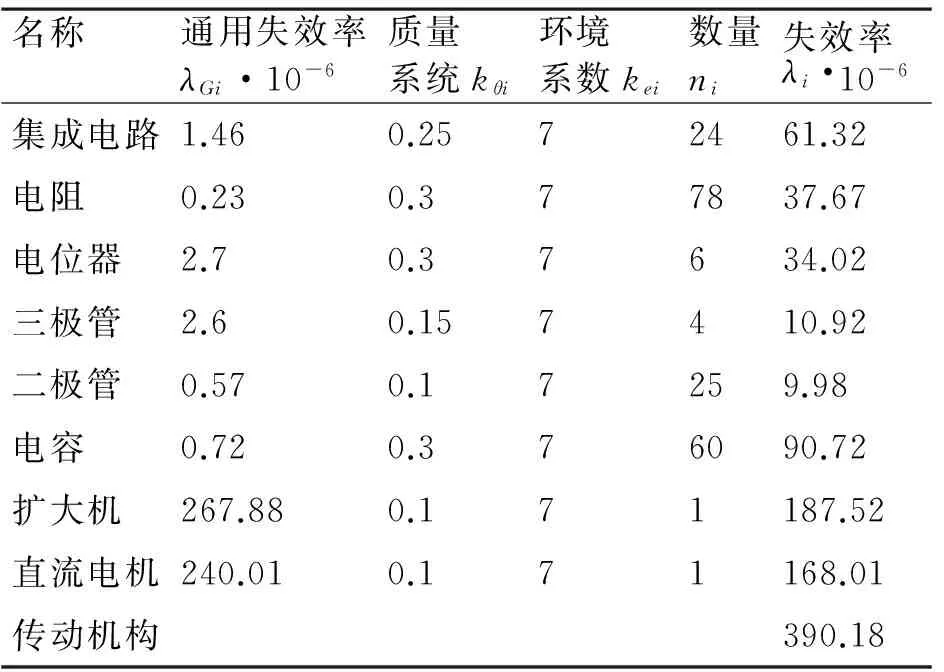
表2 電氣伺服隨動系統零部件失效率
運用模型,帶入相關數值,計算輸出信號7狀態組合失效概率值。排序如表3所示。
表3中序號0代表電氣伺服隨動系統的可靠性,序號1~15代表隨動系統失效由大至小的15種排列狀態,失效率越大的狀態組合代表出現故障的概率越高,檢測時優先進行故障檢測,從而得出系統故障時模塊檢測順序[8]。

表3 輸出信號7狀態組合概率表
3 故障診斷策略
運用GO法分析電氣伺服隨動系統故障狀態組合,并對模塊檢測優先級進行了排序。采取GO法不能具體到元器件或組件[9],采用故障模式及影響分析(FMEA)分析模塊的故障信息。故障模式及影響分析能分析系統的每一個組成部分可能存在的故障模式及其可能的故障影響和原因[10]。GO法和故障模式及影響分析法的故障診斷策略:
1) 通過GO法找出隨動系統故障發生模塊狀態組合,并定量計算出各種組合概率的大小,按照組合狀態順序進行模塊檢測。
2) 根據模塊檢測順序在FMEA表查找模塊下級零部件故障發最小割集,精確定位故障部位。
根據表3排序,當電氣伺服隨動系統出現故障時,第一步檢測模塊5的狀態,再檢測模塊2數字控制器的狀態,由于數字控制器檢測維修定位到PCB板級,引入表4數字控制器FMEA分析表,對模塊內部進一步檢測定位。

表4 數字控制器FMEA分析表
4 結語
根據隨動系統的特點,建立其GO圖,運用GO法分析隨動系統模塊故障組合概率,對模塊故障檢測進行了排序。利用FMEA影響分析表分析模塊故障,為檢測維修人員快速精確定位故障操作提供決策依據。
[1] 曲玉琨,鐘良海.基于故障樹分析法的某型火炮隨動系統故障分析[J].四川兵工學報,2010(12):11-15.
[2] 趙蕾,韓紅新,等.基于FTA-FMEA聯合法綜合診斷電子設備故障[J].艦船電子工程,2007(3):216-218.
[3] 沈祖培,黃祥瑞.go法原理及應用[M].北京:清華大學出版社,2004:25-40.
[4] 徐志,陳彬兵.可維修閉環系統GO法等效代換思考[J].通信技術,2009(12):31-34.
[5] 沈祖培,黃祥瑞.復雜系統可靠性的GO法精確算法[J].清華大學學報,2002,42(5):569-572.
[6] 裴東,袁建虎,等.遠程多管火箭炮隨動系統可靠性分析[J].解放軍理工大學學報,2003(3):56-58.
[7] 李良巧.機械可靠性設計與分析[M].北京:國防工業出版社,1998:55-68.
[8] 楊為明.可靠性.維修性.保障性總論[M].北京:國防工業出版社,1995:106-138.
[9] Shen Zupei, Gao Jia. A new qualification algorithm for the GO methodology[J]. Reliability Engineering and System Safety,2000(67):241-247.
[10] Chu B B. GO Methodology: GO User Manual[J]. Electric Power Research Institute,1983(4):188-193.
Fault Diagnosis of Follower System of Long-range Multi Launcher Rocket System Based on GO-FMEA Method
SHENG Minjun
(Army Officers Academy, Hefei 230031)
The fault diagnosis process of follower system is complex in a long-range multi launcher rocket. To solve this problem, GO methodology is proposed to analyze the reliability of system to get module failure probability. According to the value of the fault probability, the fault dictionary is established to further analyze the module failure. The process and efficiency of failure analysis are optimized and improved by the comprehensive use of the two methods.
follower system, fault diagnosis, GO method, FMEA method
2014年12月1日,
2015年1月19日
盛敏軍,男,碩士研究生,研究方向:武器裝備虛擬維修。
TJ393
10.3969/j.issn1672-9730.2015.06.031
猜你喜歡
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
汽車維護與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31
