模型參數不確定條件下的自主水下航行器(AUV)自適應編隊控制研究*
2015-03-14 11:02:14李樂強王銀濤
艦船電子工程 2015年1期
李樂強 王銀濤
(1.陜西省西安市79信箱19分箱 西安 710065)(2.西北工業大學航海學院 西安 710072)
?
模型參數不確定條件下的自主水下航行器(AUV)自適應編隊控制研究*
李樂強1王銀濤2
(1.陜西省西安市79信箱19分箱 西安 710065)(2.西北工業大學航海學院 西安 710072)
研究了自主水下航行器的編隊控制問題,基于編隊參考中心思想為每個AUV構造了期望參考軌跡。將每個AUV的系統誤差分為自身跟蹤誤差和與鄰居AUV的協同誤差兩部分,在此基礎上,針對AUV模型參數不確定性,提出一種自適應分布式控制律,使得每個AUV沿著自身期望軌跡運動,并與相鄰AUV保持同步,從而與編隊參考中心保持期望的距離,達到編隊控制的目的。文章基于Lyapunov穩定性原理從理論上證明了閉環系統的穩定性,仿真結果表明所提出的算法是有效的。
自主水下航行器; 編隊控制; 分布式控制; 自適應控制
Class Number TP242
1 引言
目前,自主水下航行器(Autonomous Underwater Vehicle,AUV)的作業多以單個形式出現。隨著任務復雜性的增大,僅通過單個AUV作業往往難以完成任務,此時需要通過多個AUV之間的合作和協調來完成任務。同時,通過AUV之間的合作和協調可以提高完成任務的效率以及整個系統的可靠性和魯棒性。編隊控制是多AUV協作中的一個典型性問題,也是研究其它協作問題的基礎,它要求各AUV在執行任務時與隊形中的其它AUV保持一定的空間距離。
編隊控制在移動機器人、無人機以及航天飛行器等領域已取得了一定的研究成果[1~4]。從已有的文獻看,主要有主從式編隊控制、基于行為的編隊控制以及基于虛擬結構的編隊控制等三種編隊方法。但相比上述研究領域及其編隊控制方法,AUV由于自身復雜的動力學特性及其主要依賴水聲通訊的作業環境,使得其編隊控制面臨更多的困難和挑戰。文獻[5]首先基于反饋線性化設計了路徑跟蹤控制器,之后基于同步梯度約束函數進行協同設計,實現了編隊路徑跟蹤;文獻[6]采用一致性算法與虛擬結構相結合研究了運動學層面的AUV小尺度編隊控制問題;文獻[7]則通過構造聯系統實現欠驅動水面船對直線路徑的協同跟蹤,但其結果很難推廣到一般的曲線路徑。上述方法在控制律設計中,僅考慮了每個AUV的自身路徑跟蹤誤差,而沒有考慮與相鄰AUV之間的位置誤差,這樣當編隊參考中心發生故障時,整個系統有可能癱瘓。
本文針對AUV模型參數不確定,設計了一種適用于AUV編隊的自適應控制律。在控制律設計中,考慮了AUV自身跟蹤誤差以及與其相鄰AUV之間的距離誤差,從理論上證明了算法的穩定性及參數收斂性,達到了編隊控制的目的。
2 問題描述
2.1 AUV編隊模型
考慮由n個AUV組成的編隊系統,其中第i個AUV的運動學及動力學模型可以描述為[8]
(1)
(2)

本文基于文獻[5]中的編隊參考點(Formation Reference Point,FRP)思想為每個AUV設定期望軌跡,如圖1所示,其中ηd(t)為編隊參考中心的期望軌跡,oi(t)為每個AUV相對于參考中心的期望編隊向量,則每個AUV的期望軌跡可以表示為
ηdi(t)=ηd(t)+R(Ψd)oi(t)
(3)
式中,Ψd(t)為參考中心相對于慣性坐標系的姿態向量,R(Ψd)為參考中心坐標系到慣性坐標系旋轉矩陣。

圖1 編隊跟蹤示意圖
2.2 控制目標
在上述知識的基礎上,首先定義第i個AUV的軌跡跟蹤誤差為
(4)
i和j之間的協同誤差定義為
(5)
在式(4)~式(5)的基礎上,對于i個AUV,其系統誤差可以表示為

(6)
為保證每個AUV與參考中心速度上的同步,定義如下輔助變量:
(7)
在上述定義的基礎上,編隊控制目標可以表示為

(8)
(9)
其中,式(8)為軌跡跟蹤誤差目標,保證每個AUV收斂到自身期望軌跡并與相鄰AUV保持期望的相對位置;式(9)為速度跟蹤目標,保證每個AUV在速度與鄰居及其參考中心保持同步。
3 控制律設計
對于由n個AUV組成如圖1所示的編隊構型,提出如下分布式自適應控制算法:
(10)

(11)

證明:由式(2)可知,存在參數不確定情形下,式(1)可以線性化表示為
(12)
將式(10)帶入式(1)并利用式(7),式(12)有
(13)

(14)
定義Lyapunov函數:
(15)
式中Λ=diag(Λi)。對式(15)進行求導有

(16)


(17)
其中,?為Kronecker積。同理,對于s有
(18)
由式(17)~式(18)有

(19)

證畢。
4 仿真算例
為驗證本文提出的編隊跟蹤控制算法,考慮六個AUV構成的編隊系統,不失一般性,以水平面內AUV動力學模型為例,其模型參數請參見文獻[8]。假定編隊網絡的通訊拓撲如圖2所示。
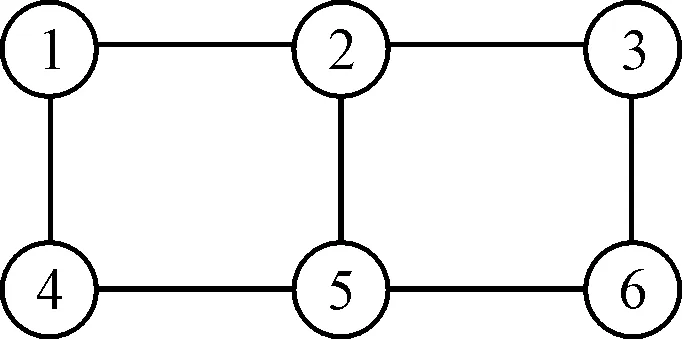
圖2 通訊拓撲結構
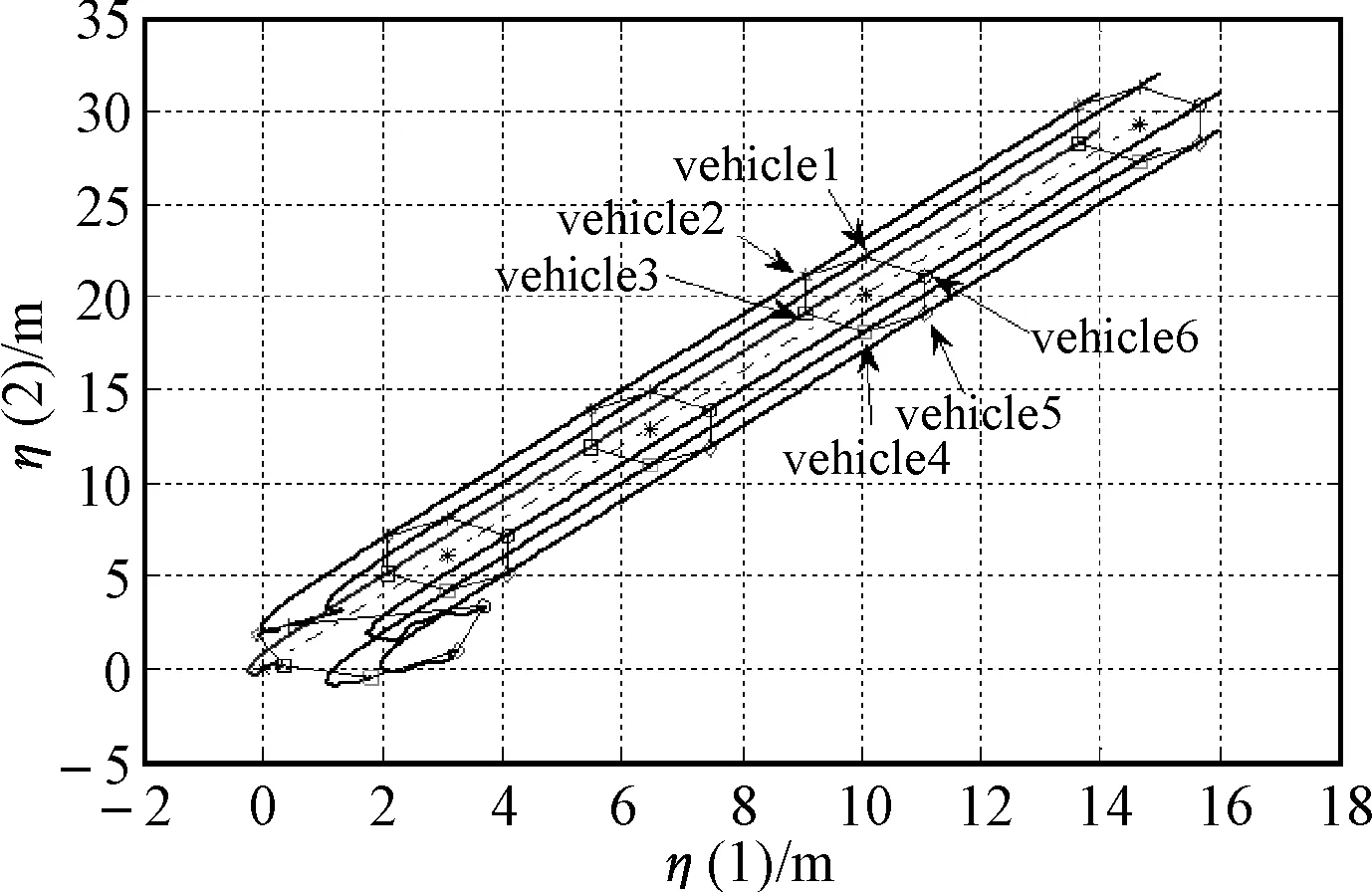
圖3 編隊軌跡曲線
圖4 軌跡跟蹤誤差曲線
仿真結果表明,各AUV能夠與編隊中心保持期望的隊形運動,且各AUV系統的位置和速度能夠實現對參考中心的協同跟蹤。因此,文中提出的控制算法可以很好地解決當AUV模型存在參數不確定性時的分布式編隊軌跡跟蹤問題。
圖5 誤差變量s響應曲線
5 結語
論文基于編隊參考中心的思想,根據編隊參考中心的位置及航向信息為每個AUV構造了期望參考軌跡,并通過使AVU跟蹤該軌跡來達到編隊控制的目的。針對水下航行器的參數不確定性特點,設計了自適應控制律。可以看出,在AUV的控制器設計中,不僅考慮了每個AUV自身的跟蹤誤差,同時考慮了與相鄰AUV之間的協同誤差,這使得所有AUV能夠同步地跟蹤編隊參考中心。此外,在模型參數自適應控制律的設計中均考慮了跟蹤誤差和協同誤差,使得控制律能根據系統誤差可以很好地進行自適應調整。文中編隊參考中心的運動沒有考慮AUV的信息狀態反饋,如何利用AUV運動信息對參考中心進行控制是進一步研究的一個重要方向。
[1] A J Healey. Application of formation control for multi-vehicle robotic mine sweeping[C]//Proceedings of the 40th IEEE Conference on Decision and Control. Orlando, Florida, USA,2001:1497-1502.
[2] W. Ren, N. Sorensen. Distributed coordination architecture for multi-robot formation control[J]. Robotics and Autonomous Systems,2008,56(4):324-333.
[3] 畢鵬,羅建軍,張博.一種基于一致性理論的航天編隊飛行器協同控制方法[J].宇航學報,2010,31(1):70-74.
[4] R. Ghabcheloo, A. Aguiar, A. Pascoal, et al. Coordinated path-following control of multiple underactuated autonomous vehicles in the presence of communication failures[C]//Proceedings of the 45th IEEE Conference on Decision and Control. San Diego, CA, USA,2006:4345-4350.
[5] I. A. F. Ihle, R. Skjetne, T. I. Fossen. Nonlinear formation control of marine craft with experimental results[C]//Proceedings of the 43th IEEE Conference on Decision and Control. Atlantis, Paradise Island, Bahamas,2004:680-685.
[6] 袁健,唐功友.采用一致性算法與虛擬結構的多自主水下航行器編隊控制[J].智能系統學報,2011,6(3):248-253.
[7] E. Borhaug, A. Pavlov, K. Pettersen. Straight Line Path Following for Formations of Underactuated Marine Surface Vessels[J]. IEEE Transactions on Control Systems Technology,2011,19(3):493-506.
[8] Fossen T. Guidance and Control of Ocean Vehicles[M]. New York, USA: Wiley,1994.
[9] Royle G, Godsil C. Algebraic Graph Theory[M]. New York, USA: Springer Graduate Texts in Mathematics,2001.
[10] Khalil H K. Nonlinear Systems[M]. NJ, USA: Prentice-Hall,2002.
Adaptive Formation Control of AUVs in the Presence of Parametric Model Uncertainty
LI Leqiang1WANG Yintao2
(1. No. 79 Postbox 19 Brench, Xi’an 710065) (2. School of Marine, Northwestern Polytechnical University, Xi’an 710072)
In this paper, the formation control problem is studied for autonomous underwater vehicle, Based on the idea of reference center formation, the expected reference trajectory for each AUV is constructed. The system error of each AUV is divided into two parts for their collaborative error tracking error and the adjacent AUV. On this basis, according to the AUV model parameter uncertainty, an adaptive distributed control disciplinarian is proposed so that each AUV along its track desired trajectory, and keeps pace with the adjacent AUV, thus maintaining a desired distance and formation reference center, to achieve the purpose of formation control. It theoretically proves the stability of the closed-loop system based on the Lyapunov stability theory. The simulation results show that the proposed algorithm is effecite.
autonomous underwater vehicle, formation control, distributed control, adaptvie control
2014年7月10日,
2014年8月23日
李樂強,男,碩士,高級工程師,研究方向:海洋工程信號處理,自動控制。王銀濤,男,博士,副教授,研究方向:水下航行器協同控制。
TP242
10.3969/j.issn1672-9730.2015.01.040
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代裝飾(2020年7期)2020-07-27 01:27:42
數學物理學報(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03