岸基反潛巡邏機支援航母編隊護航反潛陣位配置研究*
2015-03-14 12:32:25叢紅日欒玉佳劉建東
艦船電子工程 2015年10期
叢紅日 欒玉佳 劉建東
(1.海軍航空工程學院指揮系 煙臺 264001)(2.海軍航空工程學院研究生管理大隊 煙臺 264001)
?
岸基反潛巡邏機支援航母編隊護航反潛陣位配置研究*
叢紅日1欒玉佳2劉建東2
(1.海軍航空工程學院指揮系 煙臺 264001)(2.海軍航空工程學院研究生管理大隊 煙臺 264001)
根據岸基反潛巡邏機支援航母編隊護航反潛作戰任務特點,總結了岸基反潛巡邏機支援航母編隊護航反潛時的陣位配置原則,建立了關于岸基反潛巡邏機前出距離和巡邏線長度模型;在想定條件下仿真計算了各種參數對岸基反潛巡邏機陣位配置的影響,為航母編隊航渡過程中指揮員如何確定岸基反潛巡邏機陣位配置提供了依據。
航母編隊; 岸基反潛巡邏機; 陣位配置; 反潛; 護航
Class Number E837
1 引言
在現代戰爭條件下,隨著新技術在潛艇上的不斷應用,潛艇戰斗能力和生存能力逐步提高,潛艇的魚雷和潛射導彈對航母編隊的安全構成重大威脅[1]。為應對潛艇威脅,航母編隊建立外、中、內三層反潛監視區,外層反潛監視區由岸基反潛巡邏機和核動力潛艇擔任[2]。岸基反潛巡邏機具有速度快、航程遠、載彈量大、機動靈活的特點,是航母編隊中重要的反潛兵力。研究岸基反潛巡邏機的陣位配置問題,對提高航母編隊的防潛作戰能力具有重要的理論價值和軍事意義。
2 岸基反潛巡邏機陣位配置原則
航母編隊應對潛艇威脅建立外、中、內三層反潛監視區,反潛兵力包括反潛機、攻擊核潛艇、反潛直升機和水面作戰艦。航母編隊外層反潛體系由岸基反潛巡邏機和核動力潛艇擔任,主要目的是拒絕敵潛艇占領中、遠程反艦導彈射擊陣位和阻止敵潛艇接近航母編隊[2]。岸基反潛巡邏機支援航母編隊搜潛的作戰任務決定其配置陣位。
根據航母編隊護航反潛的需求以及岸基反潛巡邏機的特點,并參考相關文獻的研究,岸基反潛巡邏機的陣位配置必須滿足以下原則[3~6]: 1) 配置在對航母編隊主要威脅方向上; 2) 前出距離需要考慮岸基反潛巡邏機的續航能力; 3) 前出距離能夠給航母編隊提供一定的反潛縱深; 4) 便于同航母編隊其它反潛艦機協同作戰; 5) 便于空中掩護和預警機指揮引導。
3 岸基反潛巡邏機方位的確定
航母編隊航渡中,通常以航母作為相對基準點[4]。根據岸基反潛巡邏機陣位配置原則1),岸基反潛巡邏機需配置在受敵潛艇威脅最大的方位。在航渡過程中,通常編隊正前方受敵威脅最大,當僅有一架反潛巡邏機擔任警戒任務時,最佳配置方位為航母編隊的正前方,其任務是發現企圖從正面突破中層反潛區的敵潛艇,阻止其占領遠程導彈發射陣位;當反潛巡邏機數量充足時,可將其配置于航母編隊的后方,主要任務是發現企圖從后方突破中層反潛區的敵潛艇,阻止其占領遠程導彈發射陣位。如圖1所示。
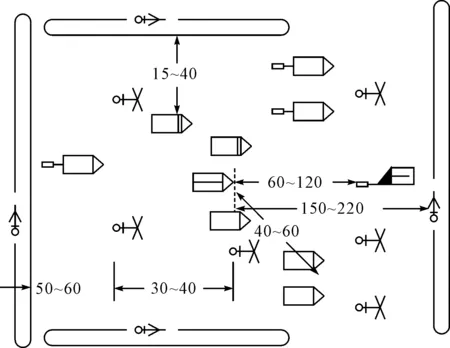
圖1 航母編隊航渡過程中對潛防御序列(單位:海里)
4 岸基反潛巡邏機前出距離的確定
4.1 遠界的確定
根據配置原則2),有D前出≤S巡邏機
(1)
式(1)中,D前出為岸基反潛巡邏機的前出距離;S巡邏機為岸基反潛巡邏機前出距基準點的最大距離;t續航為岸基反潛巡邏機的續航時間;t儲備為岸基巡邏機巡航儲備時間;t巡邏為岸基反潛巡邏機的巡邏時間;V巡為岸基反潛巡邏機的巡航速度。
4.2 近界的確定
為了保證能在敵潛艇占領導彈發射陣位之前,對其及時發現、識別并實施攻擊,要求反潛巡邏機最遲發現敵潛艇的界線稱為反潛巡邏機防潛警戒線。防潛警戒線到航母的距離即為反潛巡邏機最小前出距離,本文用D前出表示[7]。
反潛巡邏機反潛過程可以描述為:航渡過程中,岸基反潛巡邏機在航母編隊某方位一定距離內對潛搜索,搜索發現并識別敵潛艇目標,上報反潛戰指揮官,反應時間為T1;反潛戰指揮官擬制作戰方案,并下達攻擊命令,反應時間為T2;反潛巡邏機進一步跟蹤、攻擊敵潛艇目標,反應時間為T3,反潛巡邏機總的反應時間為T總[8~10],則
T總=T1+T2+T3
(2)
假設反潛巡邏機搜索發現并識別敵潛艇目標至攻擊敵潛艇這段時間,潛艇與航母編隊保持航速、航向不變,則反潛巡邏機總反應時間內,敵潛艇相對航母的航行距離D反應可表示為
D反應=(V敵潛+V航)×T總
(3)
敵潛艇反艦導彈攻擊過程中,航母編隊仍然處于運動狀態,D航表示航母編隊在導彈飛行過程的運動距離,V導彈表示敵潛艇反艦導彈的飛行速度,則
(4)
反潛巡邏機發現敵潛艇時可能存在艇位誤差Δw;反潛巡邏機有效探測范圍為p。
當巡邏機配置于航母編隊正前方時,其前出距離D前出如圖2所示,即:
D前出=D反應+D有效+D航+Δw-p
=(V敵潛+V航)×T總+D有效+V航
(5)

圖2 岸基反潛巡邏機距離配置示意圖
5 岸基反潛巡邏機巡邏線長度的確定
當航母編隊處于航渡過程中,岸基反潛巡邏機反潛巡邏線的設置應該與編隊同步動態前移,以保持航母編隊的協同[6]。如圖3所示。
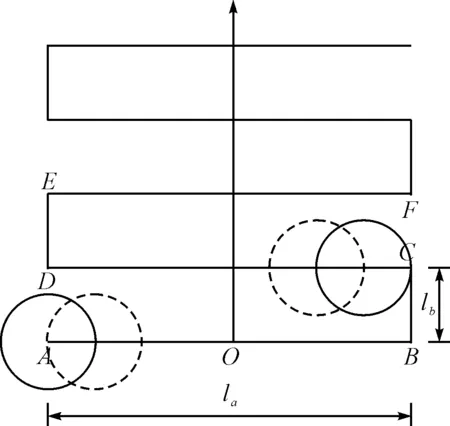
圖3 反潛巡邏機巡邏寬度示意圖
反潛巡邏機巡邏航線A-B-C為一個反潛周期,下一個周期為C-D-E。為保證反潛巡邏機與航母編隊同步航行,則在一個巡邏周期T內,反潛巡邏機向前方推進距離lb,應等于航母在周期T內前進的距離。即:
(6)
為防止在反潛巡邏機巡邏期間敵潛艇穿越反潛巡邏線,形成反潛盲區,則反潛巡邏機在A點和D點的交叉探測范圍ld,應大于敵潛艇在該期間航行距離le[11],如圖4所示。
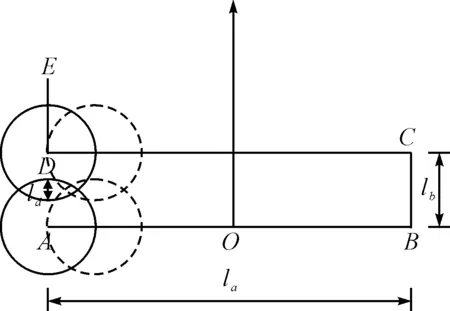
圖4 相鄰周期重疊探測區域示意圖
設t表示反潛巡邏機從巡邏點A飛至巡邏點D所需時間,ld表示巡邏機在A點同D點時重疊的探測距離,le表示敵潛艇在反潛巡邏機從巡邏點A飛至巡邏點D所需時間內的航行距離,則有
(7)
ld=2p-lb
(8)
(9)
由le≤ld,結合式(6)~式(9),得出反潛巡邏機線長度la:
(10)
6 實例仿真
6.1 敵潛艇反艦導彈有效射程與其運動速度的影響
分析岸基反潛巡邏機配置距離隨各參數的變化情況和規律。首先給出如下作戰想定:航母編隊航渡至某海區執行作戰任務,航渡速度V航,岸基反潛巡邏機在航母編隊正前方一定距離內對潛搜索,其搜索范圍為p,某時刻發現敵潛艇目標,立即上報給反潛戰指揮官,這一階段時間為T1,反潛戰指揮官接收情報后,擬定作戰方案,下定決心,并下達攻擊命令,這一階段時間為T2,反潛兵力接收到命令后攻擊敵潛艇,這一階段時間為T3。
依據敵潛艇的作戰性能,結合這些參數值,如表1所示,可以計算出岸基反潛巡邏機的最小配置距離D前出。

表1 各參數取值表
圖5給出岸基反潛巡邏機前出距離D前出隨敵潛艇反艦導彈有效射程D有效和運動速度V敵潛的變化曲線,可以看出在航母航速和反潛反應總時間一定的情況下,敵潛艇的航速V敵潛和反艦導彈的有效射程D有效對岸基反潛巡邏機的配置距離影響很大,在研究岸基反潛巡邏機前出距離時應重點考慮這兩方面因素,其中反艦導彈的有效射程對岸基反潛巡邏機前出距離D前出影響最大。
6.2 反潛兵力反潛總反應時間與航母編隊運動速度的影響
圖6給出岸基反潛巡邏機前出距離D前出隨反潛兵力反潛總反應時間T總和航母編隊運動速度V航的變化曲線,可以看出在敵潛艇的航速和反潛導彈的有效射程一定的情況下,航母編隊的航速V航和反潛反應時間T總對岸基反潛巡邏機的配置距離有影響,但是影響不是很大。
圖5 配置距離隨反艦導彈有效射程及敵潛艇航行速度變化示意圖
6.3 岸基反潛巡邏機的巡邏線長度與敵潛艇運動 速度之間的關系
圖7給出岸基反潛巡邏機巡邏線長度a隨敵潛艇運動速度V敵潛的變化規律,可以看出在航母編隊運動速度一定的情況下,敵潛艇運動速度V敵潛越大,巡邏機的巡邏羅線長度度越小。通過對敵潛艇航速的判斷,指揮員可以合理的配置岸基反潛巡邏機的數量及巡邏線長度,提高搜潛效率。
圖6 配置距離隨總反應時間及航母運動速度變化示意圖
圖7 反潛巡邏機巡邏線長度隨敵潛艇運動速度變化示意圖
7 結語
本文重點研究了岸基反潛巡邏機在航母編隊航渡過程中的陣位配置問題,包括岸基反潛巡邏機的陣位配置原則、方位的確定以及巡邏機前出距離和巡邏線長度的確定,建立了岸基反潛巡邏機陣位配置模型,應用所建立的模型,實例分析了岸基反潛巡邏機前出距離和巡邏線長度隨敵潛艇速度、反艦導彈有效射距等參數的變化情況,據此給出一些建議。這些工作為航母編隊岸基反潛巡邏機陣位配置的確定提供了定量的理論方法。
[1] 孫明太.航空反潛戰術[M].北京:軍事科學出版社,2003.
[2] 王鍵,紀金耀.美國航母戰斗群反潛作戰[J].現代艦船,2004,7:4-9.
[3] 趙小龍,吳曉鋒.航母編隊反潛聲納艦陣位確定方法研究[J].指揮控制與仿真,2007,29(3):45-48.
[4] 沈治河,樸成日.航母編隊反潛巡邏機空域配置方法研究[J].軍事運籌與系統工程,2013,3(1):51-56.
[5] 叢紅日,黃啟來.單機吊放聲納巡邏搜索線長度模型研究[J].艦船電子工程,2011,31(2):165-167.
[6] 叢紅日,嚴建鋼,等.反潛直升機反潛巡邏線模型研究[J].海軍航空工程學院學報,2010(1):5-8.
[7] 郭鳳水.P-3C反潛巡邏機的作戰使用[J].論證與研究,2002(3):45-48.
[8] 叢紅日,肖明強,等.大型艦艇編隊反潛模型研究[J].艦船電子工程,2012(5):40-42.
[9] 吳福初,石文星,等.大型艦船受潛艇魚雷攻擊威脅扇面分析[J].海軍航空工程學院學報,2014(3):291-295.
[10] 紀金耀.俄羅斯海軍協同反潛戰術[M].北京:海軍出版社,1999.
[11] 肖漢華,萬峻,徐彬.機載雷達搜索常規潛艇的建模與分析[J].現代雷達,2008,30(8):13-16.
Position Research on Shore-based Anti-submarine Patrol Aircraft in Supporting Aircraft Carrier Formation
CONG Hongri1LUAN Yujia2LIU Jiandong2
(1. Department of Command, Naval Aeronautical and Astronautical University, Yantai 264001) (2. Graduate Students’ Brigade, Naval Aeronautical and Astronautical University, Yantai 264001)
Based on the features of shore-based anti-submarine patrol aircraft in supporting aircraft carrier formation with voyage escort and anti-submarine operation, this paper concludes the positioning principles for shore-based anti-submarine patrol aircraft in supporting aircraft carrier formation with voyage escort and anti-submarine operation, establishes the fore distance model and patrol line length model for shore-based anti-submarine patrol aircraft, and probes into the effects of all variables on the position of shore-based anti-submarine patrol aircraft by simulation adopting the method of assumption, which provides eligible evidence for the commanders to decide the position of shore-based anti-submarine patrol aircraft in aircraft carrier formation in navigation.
aircraft carrier formation, shore-based anti-submarine patrol aircraft, position, anti-submarine, voyage escort
2015年4月5日,
2015年5月29日
叢紅日,男,博士,副教授,研究方向:航空反潛戰術。欒玉佳,男,碩士研究生,研究方向:航空反潛戰術。劉建東,男,碩士研究生,研究方向:航空反潛戰術。
E837
10.3969/j.issn.1672-9730.2015.10.009