可編程平面五連桿機械手
2015-03-16 00:45:04王子祺
發明與創新·中學生
2015年3期
王子祺

一天我在網上看到一個“小賤鐘”的視頻,視頻里的機械手能寫出當前時間,但呈現的數字僅是一個可識別的狀態,歪歪扭扭的非常不標準,有沒有辦法改變這一情況?
通過下載資料和結構圖,我發現小賤鐘其實是一個凸五連桿機械手的結構:兩個舵機帶動兩個大臂運動,兩個大臂再帶動兩個小臂,最后控制頂端的機械手做位移動作;加上兩個舵機之間的間距,一共五個連桿。
目前,這種機械手還存在一定缺憾,只限于非實時、基于示教型的模式,只有先通過計算機記錄人工走的軌跡,才能把該軌跡寫出來。我的研究就是想解決這類機械手的實時性與可編程性的問題。
一、制作實物
采用SolidWorks三維實體設計軟件設計平面五連桿機械手的每個零件;將這些零件在Solidworks中組裝,進行虛擬仿真,對模擬過程中出現的問題進行修正與完善。當滿足實驗需求后,將零件圖傳給工廠。最后組裝零件,形成實體結構平臺。
二、優化選擇,采集數據點
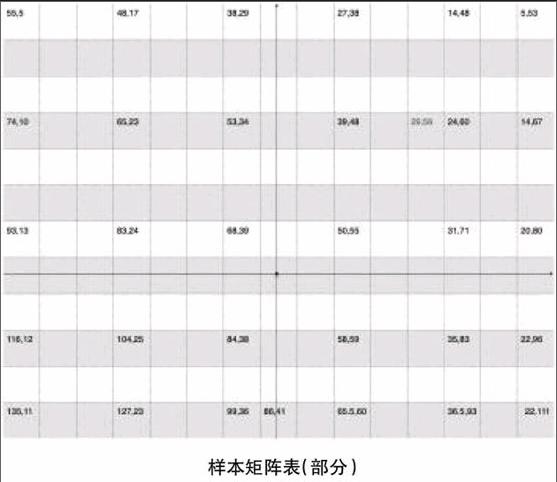
記錄各點在X、Y坐標系下的轉角數據。以平臺的左下角為原點,建立平面直角坐標系,在橫坐標上選擇均勻分布的6個坐標點,在縱坐標上選擇同樣的5個坐標點,共30個抽樣測試坐標點;通過編寫測試軟件,使之可通過兩個電位計調整舵機脈沖信號的寬度(500μs至2500μs之間),從而以將近2000級的精度分別控制兩個舵機,還可以把當前值顯示在屏幕上。
利用這一原理,對每個取樣坐標點進行人工定位,并記錄每個坐標點對應的兩個舵機的轉角數值,共得到30對離散的X、Y坐標系上的數據樣本。……
登錄APP查看全文