基于元胞自動(dòng)機(jī)的海上溢油擴(kuò)散模擬
2015-03-22 02:36:18彭曉鵑張亦漢
海洋通報(bào) 2015年4期
關(guān)鍵詞:模型
彭曉鵑,張亦漢
(l.國(guó)家海洋局南海環(huán)境監(jiān)測(cè)中心,廣東 廣州 510300;2.廣東財(cái)經(jīng)大學(xué) 地理與旅游學(xué)院,廣州 510320)
國(guó)家經(jīng)濟(jì)的高速發(fā)展增加了對(duì)能源的需求,這促使了國(guó)家海洋石油運(yùn)輸和石油開(kāi)采的發(fā)展,也導(dǎo)致了海上溢油事故發(fā)生次數(shù)的增加,尤其是增大了重特大溢油事故的風(fēng)險(xiǎn)(牟林等,2011)。目前,海上溢油是影響國(guó)家的重要環(huán)境問(wèn)題,這類溢油事故在短時(shí)間內(nèi)排入大量的石油到海洋中,對(duì)海洋環(huán)境、海洋生物以及沿海生態(tài)等造成了嚴(yán)重的危害(Ferraro et al,2009;Klemas,2010)。而且這種危害的周期很長(zhǎng),修復(fù)過(guò)程復(fù)雜(Hoff,1993)。例如:2001年底發(fā)生在西班牙海域的“威望”號(hào)油輪斷裂事件和2010年墨西哥灣的鉆井平臺(tái)溢油事故。根據(jù)調(diào)查與統(tǒng)計(jì),頻繁發(fā)生的海上溢油事故致使每年有600 萬(wàn)噸石油泄入到海洋中(Shi et al,2008)。因此,許多研究機(jī)構(gòu)相繼開(kāi)展了溢油方面的研究工作,制定一系列的溢油應(yīng)急策略以最大限度地保護(hù)生態(tài)環(huán)境并減少財(cái)產(chǎn)損失。研究表明,準(zhǔn)確地模擬并預(yù)測(cè)溢油的動(dòng)態(tài)變化是制定溢油應(yīng)急對(duì)策和保護(hù)海洋生態(tài)環(huán)境的基礎(chǔ)和前提(Abascal,2009;Klemas,2010)。
溢油動(dòng)態(tài)變化是一個(gè)非常復(fù)雜的過(guò)程,不僅受到氣象、水文和生物等過(guò)程的影響,而且還與石油的性質(zhì)、溢油的深度、溢油速度等密切相關(guān)。傳統(tǒng)的溢油模擬方法主要是采用基于物理過(guò)程和微分方程的數(shù)值模擬,模擬溢油的行為包括漂移、擴(kuò)散、蒸發(fā)、溶解等(Chao et al,2003)。這類方法對(duì)于研究溢油變化的機(jī)理、掌握其演變規(guī)律有重要的作用,但是它們往往比較復(fù)雜且參數(shù)難與獲取(Wang et al,2005)。基于元胞自動(dòng)機(jī)(CA) 溢油模型是一種很好的替代方法,模型可采用多種算法挖掘模型參數(shù)、設(shè)置轉(zhuǎn)換規(guī)則,便可以很好地模擬出全局的溢油變化情況(Karafyllidis,1997; Liu et al,2006)。此外,CA 模型的數(shù)據(jù)結(jié)構(gòu)與地理信息系統(tǒng)(GIS) 中的柵格數(shù)據(jù)模型高度一致,能夠直觀方便地顯示、處理和分析模擬結(jié)果(Li et al,2002)。Karafyllidis(1997) 首先提出用CA 模型構(gòu)建溢油擴(kuò)散模型,在他的模型中,考慮了風(fēng)力、洋流、邊界和蒸發(fā)作用等,其理想實(shí)驗(yàn)與真實(shí)的溢油擴(kuò)散情景是吻合的。Rusinovic 等(2006) 在Karafyllidis 的基礎(chǔ)上著重考慮了溢油的沉降、融解和乳化等作用,并提出了改進(jìn)的溢油CA 模型。Shyue 等(2007) 則用CA 模型模擬了擴(kuò)散、蒸發(fā)和對(duì)流等,模型還考慮了質(zhì)量守恒原理及溢油運(yùn)輸物理過(guò)程。王璐等(2009) 運(yùn)用CA 建立了污染帶擴(kuò)散漂移規(guī)則,對(duì)突發(fā)性水污染事故進(jìn)行了模擬,得出了污染物質(zhì)的漂移軌跡和時(shí)空動(dòng)態(tài)變化。李維乾等(2013) 結(jié)合元胞自動(dòng)機(jī)和智能體并建立了水污染可視化擴(kuò)散模型,運(yùn)用該模型模擬了流域污染物的運(yùn)移擴(kuò)散過(guò)程。
盡管一些學(xué)者嘗試用CA 模型模擬溢油的動(dòng)態(tài)變化,但是采用CA 模型研究溢油變化尚處于起步階段,且已有的溢油CA 研究大多是比較復(fù)雜且參數(shù)(如:元胞間的溢油擴(kuò)散系數(shù),蒸發(fā)系數(shù)等) 難以獲取。因此,本文提出利用元胞自動(dòng)機(jī)以研究溢油擴(kuò)散情景,元胞自動(dòng)機(jī)彌補(bǔ)了傳統(tǒng)GIS 所不能動(dòng)態(tài)分析的缺陷,能很好地滿足對(duì)溢油演變的模擬需求,為更好地理解溢油演化過(guò)程及機(jī)制提供幫助。本文利用多種算法(如邏輯回歸和決策樹(shù)等) 以挖掘不同的溢油轉(zhuǎn)換規(guī)則,并構(gòu)建了兩個(gè)不同的CA模型——邏輯回歸CA 模型和決策樹(shù)CA 模型。這兩個(gè)模型均非常方便且容易使用,在溢油模擬過(guò)程中只需設(shè)置起始影像、影響因子和模型參數(shù)等便可以模擬溢油的動(dòng)態(tài)變化情況。我們把這兩個(gè)模型應(yīng)用到DeepSpill 項(xiàng)目的溢油模擬實(shí)驗(yàn)中以檢驗(yàn)其模擬效果。
1 模型與數(shù)據(jù)
1.1 元胞自動(dòng)機(jī)及其算法
元胞自動(dòng)機(jī)作為人工生命的理論方法分支,是研究復(fù)雜系統(tǒng)非常方便和有效的工具,具有強(qiáng)大的空間運(yùn)算能力,可有效地模擬復(fù)雜的動(dòng)態(tài)系統(tǒng)。它在計(jì)算機(jī)支持下可以自下而上地對(duì)復(fù)雜自然系統(tǒng)(如城市擴(kuò)張、土地利用變化、景觀演變等) 進(jìn)行模擬、預(yù)測(cè)、優(yōu)化和顯示(Li et al,2011)。本文將運(yùn)用邏輯回歸和決策樹(shù)分別挖掘轉(zhuǎn)換規(guī)則,并構(gòu)建邏輯回歸CA 模型和決策樹(shù)CA 模型。
1.1.1 邏輯回歸CA 模型
邏輯回歸CA 模型最早由Wu(2002) 提出來(lái)的。該方法對(duì)于因變量是二項(xiàng)分類的常量(如溢油區(qū)域,非溢油區(qū)域) 不滿足正態(tài)分布的條件下是非常適用的,還可以利用邏輯回歸技術(shù)對(duì)CA 模型的轉(zhuǎn)換規(guī)則進(jìn)行校正。在溢油CA 模型中,設(shè)定某元胞t+1 時(shí)刻成為溢油元胞的概率為:


其中,r 為 [0,1] 間的隨機(jī)數(shù),c 為控制隨機(jī)變量大小的參數(shù),α 為常數(shù)項(xiàng),bk為影響因子的權(quán)重,xk為影響因子,如離溢油中心的距離,海風(fēng)等。
得出元胞發(fā)展概率后,還要判斷該元胞是否發(fā)展為溢油區(qū)域:

式中:Pthreshold為閾值,其值域范圍一般0~1,γ 為隨機(jī)變量,β=1/K,K 為迭代次數(shù)。
在邏輯回歸CA 中,主要需要運(yùn)用邏輯回歸算法對(duì)訓(xùn)練樣本進(jìn)行訓(xùn)練以確定各個(gè)影響因子(bk)的權(quán)重(bk) 和常數(shù)項(xiàng)(α)。再把權(quán)重和常數(shù)項(xiàng)放入到模型中便可以自下而上地模擬出溢油擴(kuò)散情景。
1.1.2 決策樹(shù)CA 模型
本文還利用決策樹(shù)方法構(gòu)建CA 模型,這種方法對(duì)于知識(shí)獲取困難和不確定的情況下非常實(shí)用(Li et al,2011)。運(yùn)用C5.0 決策樹(shù)生成算法,它是根據(jù)“信息增加的比值”來(lái)決定整個(gè)決策樹(shù)的生成。假設(shè)訓(xùn)練集數(shù)據(jù)為S,共有類別C,數(shù)據(jù)集S的平均信息熵為:
其中,freq(Cj,S)為S 中屬于類別Cj的樣本數(shù),|S|為樣本總數(shù)
把S 分解為n 個(gè)子集(Si),分解后的平均信息熵為;

分解后信息增加值為:

為了防止產(chǎn)生過(guò)多的分解數(shù)目,需要對(duì)進(jìn)行標(biāo)準(zhǔn)化,最終得出信息增加的比值為:

其中:

決策樹(shù)在生成的過(guò)程中,必須滿足熵的減少值達(dá)到最大。運(yùn)用計(jì)算機(jī)反復(fù)尋找最佳分解,便可以生成決策樹(shù)。例如:
規(guī)則1:
如果 土地覆蓋=陸地
則 禁止成為溢油區(qū)域
規(guī)則2
如果 土地覆蓋=海洋
鄰近溢油元胞個(gè)數(shù)>6
離溢油中心小于100 m
則 該中心元胞成為溢油區(qū)域
在決策樹(shù)CA 模型中,需要運(yùn)用決策樹(shù)算法對(duì)訓(xùn)練樣本進(jìn)行訓(xùn)練,以確定最優(yōu)的分割因子和閾值,并生成節(jié)點(diǎn)和對(duì)應(yīng)的子集。再在子集中確定最優(yōu)的分割因子和閾值,并生成節(jié)點(diǎn)和對(duì)應(yīng)的子集,以此循環(huán)直到子集不可再分,便生成了決策樹(shù)。再把決策樹(shù)轉(zhuǎn)成if-then 語(yǔ)句,放入到CA 模型中,便可以自下而上地模擬出溢油擴(kuò)散情景。
1.2 研究區(qū)及其數(shù)據(jù)準(zhǔn)備
2000年6月,以美國(guó)礦業(yè)資源管理局為首的機(jī)構(gòu)聯(lián)合22 個(gè)石油公司共同贊助了“DeepSpill”的大型深海溢油試驗(yàn)研究項(xiàng)目,主要是為了驗(yàn)證溢油模型準(zhǔn)確性、檢驗(yàn)溢油事故的監(jiān)測(cè)設(shè)備以及評(píng)估溢油事故應(yīng)急的安全問(wèn)題。該項(xiàng)目由挪威SINTEF研究所的科學(xué)家Johansen 擔(dān)任項(xiàng)總指揮,于當(dāng)?shù)貢r(shí)間2000年6月27 至29日在北海挪威海域Helland Hansen(北緯65 度00 分,東經(jīng)04 度50分) 進(jìn)行了實(shí)驗(yàn)。實(shí)驗(yàn)中以釋放氮?dú)夂秃K詸z驗(yàn)設(shè)備,隨后釋放了柴油和天然氣混合物、原油和天然氣混合物、天然氣,并用多種設(shè)備記錄了其溢油過(guò)程(Johansen,2003;廖國(guó)祥,2011)。本文選取“DeepSpill”試驗(yàn)中的柴油和天然氣混合物的擴(kuò)張作為案例,進(jìn)行元胞自動(dòng)機(jī)建模與模擬。
項(xiàng)目收集了來(lái)自Far Grip 監(jiān)測(cè)船上的兩張清晰溢油影像,分別拍攝于6月27日8 點(diǎn)34 分和8 點(diǎn)40 分。通過(guò)解譯可以得出兩個(gè)時(shí)間的溢油范圍(圖1)。其中初始時(shí)刻(8 ∶34) 的溢油范圍作為模型的初始影像,終止時(shí)刻(8 ∶40) 的溢油范圍作為CA 模型的檢驗(yàn)影像,對(duì)比兩期影像還可以發(fā)現(xiàn)溢油主要朝東南方向擴(kuò)張并漂移。
溢油具有由中心向外擴(kuò)張?zhí)卣鳎▓D2a),文中獲取了溢油中心點(diǎn)位置,采用歐幾里德距離得出距離溢油中心點(diǎn)的距離因子(圖2b)。也收集了當(dāng)時(shí)的海風(fēng)和洋流等信息,海風(fēng)東向速度和北向速度分別為4.344 m/s 和9.46 m/s;洋流東向速度和北向速度分別為-2.696 m/s 和8.099 m/s,并將它們投影到溢油擴(kuò)散方向(圖2c 和圖2d)。利用溫鹽深儀器(CTD),還得到了溢油地區(qū)的海水溫度和鹽度分布(表層) 情況(圖2e 和圖2f)。
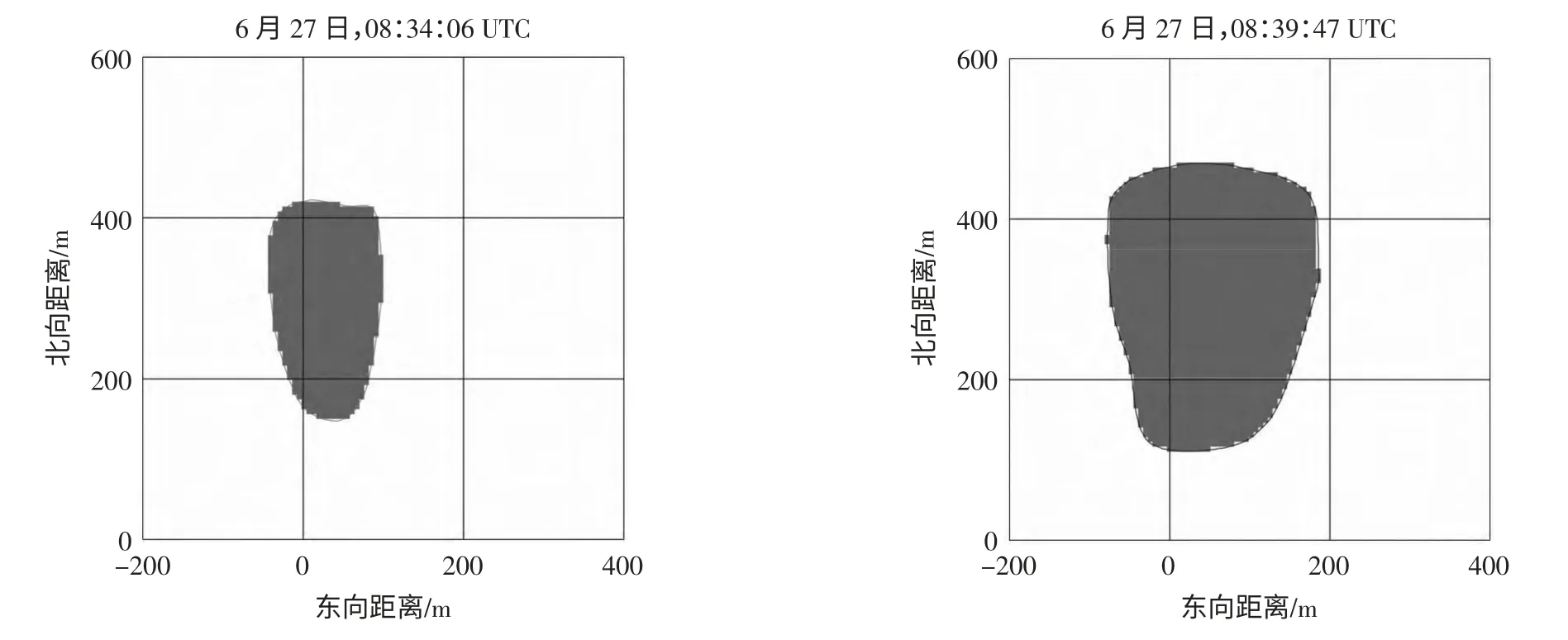
圖1 溢油范圍圖
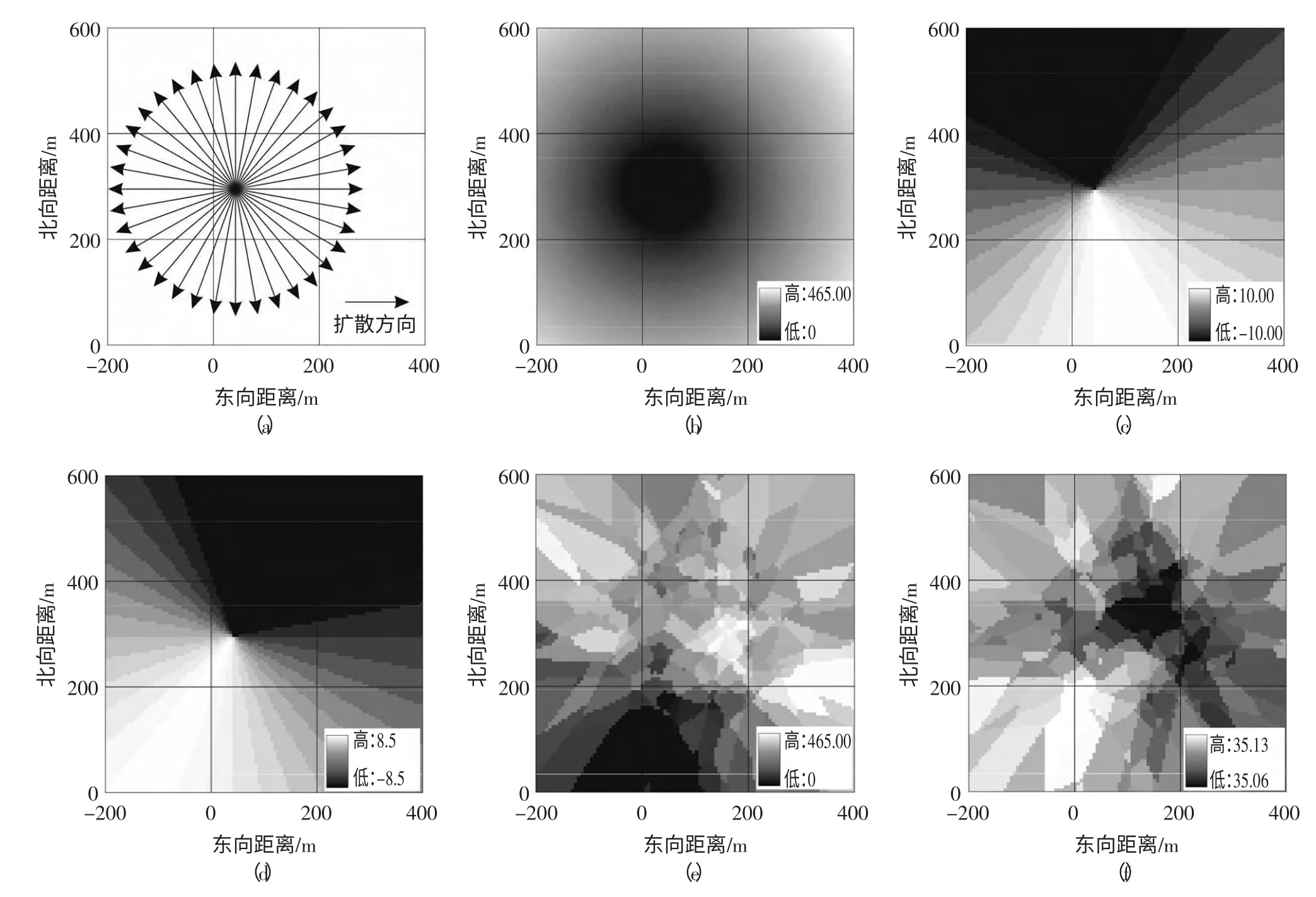
圖2 溢油影響因子
文中采用隨機(jī)采樣方法以獲取樣本數(shù)據(jù),并將樣本分成兩組,訓(xùn)練樣本(用于挖掘CA 的轉(zhuǎn)換規(guī)則) 和測(cè)試樣本(用于檢驗(yàn)規(guī)則的精度)。樣本數(shù)量一般為全區(qū)的20%(Li et al,2002)。通過(guò)使用SPSS 軟件對(duì)訓(xùn)練樣本進(jìn)行邏輯回歸可得到各個(gè)變量的權(quán)重(表1),各變量的置信度均大于95 %(即,α<=0.05)。在表中,可以看到距離因子的權(quán)重為負(fù)值,這表明若距離溢油中心越遠(yuǎn)(值越大),那么成為溢油元胞的概率越小。洋流與海風(fēng)的權(quán)重分別為正值和負(fù)值,表明洋流的擴(kuò)散方向(向東南) 與溢油的擴(kuò)散方向一致,而海風(fēng)的擴(kuò)散方向(向西南) 與溢油方向不一致。鹽度、溫度和常數(shù)項(xiàng)的正負(fù)往往具有較大的不確定性,這主要是因?yàn)閰^(qū)域內(nèi)最大最小鹽度與溫度的變化幅度非常小,分別為0.07 與0.08,而訓(xùn)練樣本的微小差別足以改變鹽度與溫度的權(quán)重正負(fù)。而常數(shù)項(xiàng)則起到平衡作用,要使得各個(gè)變量與權(quán)重的乘積和加上常數(shù)項(xiàng)的結(jié)果在一定的范圍內(nèi)(約14.5),因此常數(shù)項(xiàng)的變化往往也比較大。對(duì)這些權(quán)重進(jìn)行檢驗(yàn),即把這些權(quán)重應(yīng)用到測(cè)試樣本中。實(shí)驗(yàn)發(fā)現(xiàn),測(cè)試精度達(dá)到88.1 %,滿足模型的模擬要求(Li et al,2004)。而對(duì)決策樹(shù)挖掘的規(guī)則進(jìn)行檢驗(yàn),我們發(fā)現(xiàn)其測(cè)試精度達(dá)到了88.5 %,置信度也大于95 % (即,α<=0.05),同樣滿足后續(xù)模擬的要求。

表1 影響因子的權(quán)重
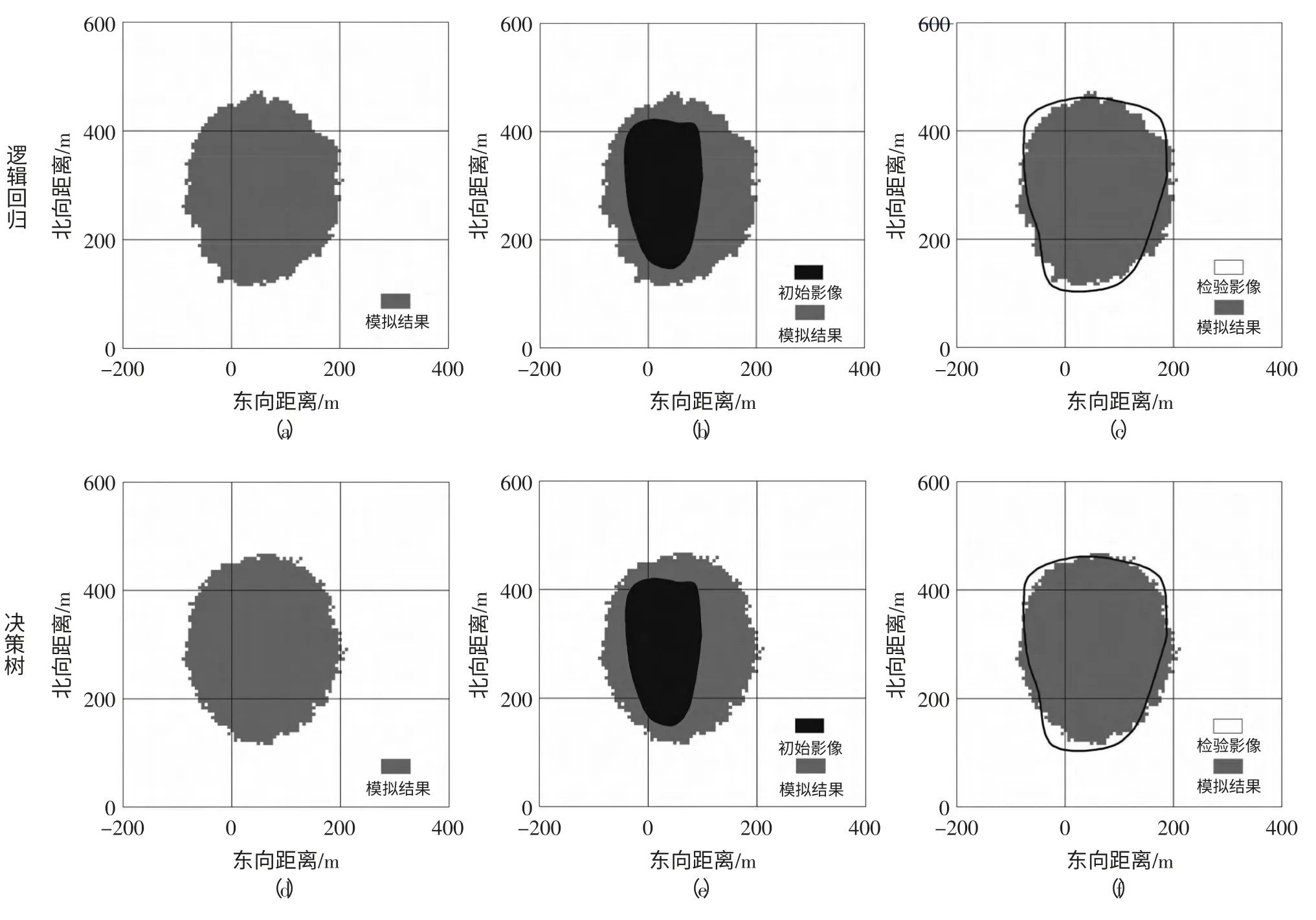
圖3 模擬結(jié)果
2 結(jié)果與分析
2.1 參數(shù)設(shè)置與模擬結(jié)果
文中設(shè)定模型的起始影像為8 點(diǎn)34 分的溢油范圍。模型的影響因子分別為距離因子、海面風(fēng)場(chǎng)、洋流、溫度和鹽度(圖2),各個(gè)因子的權(quán)重如表1 所示。設(shè)定模擬結(jié)果與8 點(diǎn)40 分的溢油范圍相等時(shí)模型便停止模擬,模型的模擬結(jié)果如圖3所示。
從圖3(a) 和圖3(d) 可以,模擬結(jié)果是鄰域擴(kuò)張的結(jié)果,并沒(méi)有出現(xiàn)“飛地”或者“島”的形狀,這主要是因?yàn)樵詣?dòng)機(jī)的模擬規(guī)則決定的。從公式(1) 可知,若某一元胞的鄰域中沒(méi)有溢油元胞的存在,那么鄰域函數(shù)值和元胞發(fā)展概率均為0,因此不會(huì)成為溢油元胞。從圖3(b) 與圖3(e) 中可知,模擬結(jié)果顯現(xiàn)出橢圓狀,與初始狀態(tài)相比有較大的變化。而且模擬結(jié)果的中心位置已偏離了初始影像的中心位置,這表明溢油受到海風(fēng)和洋流的影響產(chǎn)生了漂移。而從圖3(c) 和圖3(f) 則可以看出,模擬結(jié)果與驗(yàn)證結(jié)果的吻合程度是相當(dāng)高的,其模擬結(jié)果與真實(shí)的結(jié)果非常相近。
文中通過(guò)混淆矩陣計(jì)算了邏輯回歸CA 模型和決策樹(shù)CA 模型的模擬精度(表2)。從表中可知,在邏輯回歸CA 模型和決策樹(shù)CA 模型中,對(duì)于非溢油元胞的模擬結(jié)果,其精度分別為97.7 %和97.8%。但是,這個(gè)精度往往與研究區(qū)域的大小有關(guān)系。若研究區(qū)域較大,而溢油區(qū)域較小,那么該精度也會(huì)很高。而在溢油元胞的模擬結(jié)果中,兩個(gè)模型的模擬精度分別為91.6%和92.1%。該指標(biāo)能夠很好地反映模擬結(jié)果中變化部分的精度水平。對(duì)于整個(gè)研究區(qū),兩個(gè)模型的模擬總精度可達(dá)到96.4%與96.6%。文中也引入了整體對(duì)比方法中一個(gè)常用的指標(biāo)——Kappa 系數(shù)。該指標(biāo)常常是用來(lái)評(píng)價(jià)遙感圖像的分類精度問(wèn)題,是評(píng)價(jià)分類圖像和實(shí)地調(diào)查結(jié)果一致性的指標(biāo)。實(shí)驗(yàn)可知,兩個(gè)模型的模擬結(jié)果的kappa 系數(shù)達(dá)到0.89 以上,表明基于元胞自動(dòng)機(jī)的溢油模擬結(jié)果均與實(shí)際情況很吻合。

表2 模擬精度及kappa 系數(shù)
2.2 溢油預(yù)測(cè)與分析
根據(jù)溢油的擴(kuò)散方程(莊學(xué)強(qiáng)等,2007),我們計(jì)算出溢油的擴(kuò)散面積,并把擴(kuò)散面積作為結(jié)束條件。然后分別運(yùn)用邏輯回歸和決策樹(shù)CA 模型對(duì)溢油范圍進(jìn)行了預(yù)測(cè),分別預(yù)測(cè)溢油10 min(圖4a、圖4d)、30 min(圖4b、圖4e) 和60 min(圖4c、圖4f) 的情景。從圖中可以看出,3 個(gè)時(shí)間段的溢油范圍均有明顯向東南方向擴(kuò)張的趨勢(shì)。隨著時(shí)間推移,溢油范圍不斷擴(kuò)大。在溢油擴(kuò)散30 min后,溢油的擴(kuò)散行為有向南擴(kuò)散的趨勢(shì),特別是決策樹(shù)CA 模型。這主要是受到海風(fēng)與洋流的影響。當(dāng)模擬到60 min 后,溢油的范圍更大,呈現(xiàn)出中心擴(kuò)散趨勢(shì),特別是邏輯回歸CA 模型。這主要是由溢油CA 模型的轉(zhuǎn)換規(guī)則決定的,根據(jù)公式(1)元胞成為溢油元胞的概率與鄰域的溢油元胞個(gè)數(shù)成正比。模擬到60 min,許多非溢油區(qū)域已被溢油元胞包圍,相比模擬初始階段(鄰域中只有較少溢油元胞),它們成為溢油元胞的概率顯著增加。
2.3 分析與討論
在模擬效果上,我們對(duì)比了決策樹(shù)CA 模型與邏輯回歸CA 模型的精度與kappa(表2),可以發(fā)現(xiàn)決策樹(shù)CA 模型總精度和Kappa 系數(shù)分別為96 %與0.899,均比邏輯回歸都略微高一點(diǎn),但是兩者沒(méi)有非常明顯的差距。根據(jù)Li 和Yeh(2004)研究,決策樹(shù)CA 模型在模擬效果上會(huì)顯著地高于邏輯回歸CA 模型。在本研究中,兩者屬地明顯主要是因?yàn)槟M時(shí)間較短、轉(zhuǎn)換量少,兩個(gè)模型的都能夠較好的挖掘出合適的規(guī)則,因此兩個(gè)模型的模擬效果都非常好。
在獲取轉(zhuǎn)換規(guī)則上,邏輯回歸CA 模型通過(guò)運(yùn)用邏輯回歸算法得出各個(gè)影響因子的權(quán)重(如表1),代入到模型中然后進(jìn)行模擬。這種方法非常容易實(shí)現(xiàn),但是其轉(zhuǎn)換規(guī)則仍然是隱藏的。決策樹(shù)CA 模型的優(yōu)點(diǎn)是能從大量的空間數(shù)據(jù)中自動(dòng)獲取明確的轉(zhuǎn)換規(guī)則,無(wú)需使用數(shù)學(xué)表達(dá)式來(lái)定義轉(zhuǎn)換規(guī)則,并能在生成轉(zhuǎn)換規(guī)則的同時(shí)對(duì)模型自動(dòng)進(jìn)行糾正。該模型能夠很好地解決從眾多空間變量時(shí)獲取參數(shù)值比較困難的問(wèn)題。
在樣本要求上,兩者均不要求訓(xùn)練樣本分布是否是服從正態(tài)分布,對(duì)于其它CA 模型(如:多準(zhǔn)則CA) 具有更強(qiáng)的適應(yīng)能力。邏輯回歸CA 模型在對(duì)樣本進(jìn)行訓(xùn)練時(shí),一定會(huì)考慮各個(gè)影響因子對(duì)模型的影響,而且每個(gè)因子的權(quán)重都會(huì)有具體的值(如表1)。對(duì)于影響比較少,或者沒(méi)有影響的因子依然會(huì)有相應(yīng)的值。但是本文的決策樹(shù)CA 模型能夠很好地把影響小的因子(鹽度和溫度) 自動(dòng)去除,同時(shí)也可以采用設(shè)置相關(guān)的修剪比例(本文設(shè)置為5%),使得決策樹(shù)CA 模型具有更好的泛化能力,避免過(guò)度擬合。
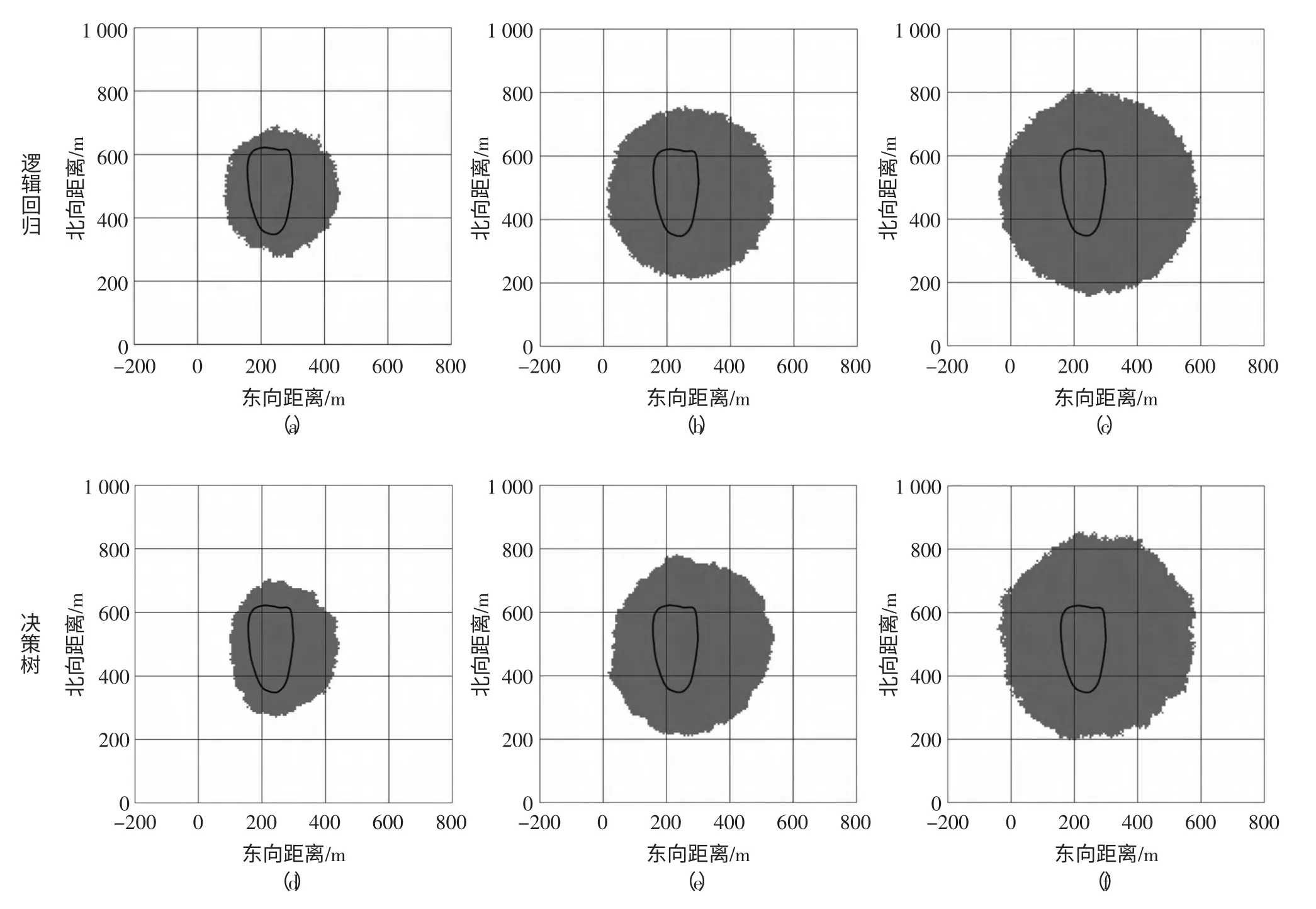
圖4 溢油范圍的預(yù)測(cè)
在因子選擇上,邏輯回歸CA 模型一般情況下需要進(jìn)行因子相關(guān)分析。由于模擬的因子間往往有相關(guān)性,在進(jìn)行模擬前可以進(jìn)行運(yùn)用主成分分析或者因子分析等技術(shù)進(jìn)行因子篩選。但決策樹(shù)CA 模型卻不需要進(jìn)行因子分析等,決策樹(shù)CA 模型中能夠很好地對(duì)影響因子進(jìn)行分析,并在構(gòu)建決策樹(shù)時(shí)直接除去。在因子選擇上,決策樹(shù)CA 模型具有更強(qiáng)的適應(yīng)能力,能夠很好地去除影響小的相關(guān)因子。
在適用范圍上,邏輯回歸CA 模型能夠得出數(shù)學(xué)上的模型參數(shù),能夠很好的描述模型的因子權(quán)重大小,模型對(duì)于模擬一般地理過(guò)程具有較強(qiáng)的適應(yīng)能力。但是對(duì)于復(fù)雜的地理過(guò)程,決策對(duì)CA 模型卻能夠更好地表達(dá),主要是因?yàn)闆Q策樹(shù)CA 模型在復(fù)雜的數(shù)據(jù)中迅速、準(zhǔn)確地挖掘出顯式的轉(zhuǎn)換規(guī)則,為準(zhǔn)確地模擬地理過(guò)程提供保障。但是在使用決策樹(shù)算法進(jìn)行挖掘CA 模型的轉(zhuǎn)換規(guī)則時(shí)仍然要注意,需要用連續(xù)的決策樹(shù)算法(如C5 等) 對(duì)連續(xù)數(shù)據(jù)進(jìn)行挖掘。若用非離散的決策樹(shù)算法(ID3)則有可能會(huì)因?yàn)閷?shí)際模擬數(shù)據(jù)超過(guò)訓(xùn)練樣本離散邊界而導(dǎo)致模擬結(jié)果不理想。
3 結(jié)論
目前,已有的溢油CA 研究大多是非常復(fù)雜且參數(shù)獲取困難,難以滿足溢油應(yīng)急快速響應(yīng)的要求。文中使用元胞自動(dòng)機(jī)、邏輯回歸和決策樹(shù)等構(gòu)建了邏輯回歸CA 模型和決策樹(shù)CA 模型,并把這兩個(gè)模型分別模擬了“Deepspill”中的海上溢油情景。從使用方面上看,邏輯回歸CA 模型和決策樹(shù)CA 模型能夠很方便地獲取模型參數(shù),而且對(duì)模型的影響因子等沒(méi)有非常嚴(yán)格的要求。這兩個(gè)CA 模型只需要通過(guò)設(shè)置起始影像,影響因子和權(quán)重等參數(shù),便可以方便地模擬出溢油的時(shí)空變化過(guò)程。實(shí)驗(yàn)表明使用決策樹(shù)CA 模型的模擬結(jié)果總精度高達(dá)96.6%,Kappa 系數(shù)高達(dá)0.899。而邏輯回歸CA 模型的模擬結(jié)果模擬精度也高達(dá)到了96.4%,Kappa系數(shù)達(dá)到0.893。通過(guò)對(duì)比兩個(gè)模型,還發(fā)現(xiàn)決策樹(shù)CA 模型是能從空間數(shù)據(jù)中獲取明確的轉(zhuǎn)換規(guī)則,突破了傳統(tǒng)CA 模型只能用數(shù)學(xué)表達(dá)式定義轉(zhuǎn)換規(guī)則局限。此外,該模型能夠通過(guò)自動(dòng)修剪功能等很好地自動(dòng)去除影響小的因子,使得決策樹(shù)CA模型具有很強(qiáng)的泛化能力。由于對(duì)訓(xùn)練樣本、因子選擇的限制少且能夠在復(fù)雜的數(shù)據(jù)中迅速、準(zhǔn)確地挖掘出轉(zhuǎn)換規(guī)則,決策樹(shù)CA 模型具有很強(qiáng)的適應(yīng)能力。因此認(rèn)為基于智能算法的溢油CA 模型能夠更能夠滿足溢油快速響應(yīng)的要求。
邏輯回歸CA 模型和決策樹(shù)CA 模型可以模擬溢油的擴(kuò)散過(guò)程和漂移,但并沒(méi)有考慮溢油消失過(guò)程。因此,下一步研究工作,將對(duì)模型進(jìn)行改進(jìn)使得其能模擬蒸發(fā)、沉降等溢油行為以適應(yīng)溢油模擬研究。
Abascal A, Castanedo S, Mendez F J, et al, 2009. Calibration of a Lagrangian transport model using drifting buoys deployed during the Prestige oil spill.Journal of Coastal Research,80-90.
Chao X B,Shankar N J,Wang S Y,2003.Development and application of oil spill model for Singapore coastal waters. Journal of Hydraulic Engineering,129(7):495-503.
Ferraro G,Meyer Roux S,Muellenhoff O,et al,2009.Long term monitoring of oil spills in European seas. International Journal of Remote Sensing,30(3):627-645.
Hoff Z,1993.Bioremediation:an overview of its development and use for oil spill cleanup.Marine Pollution Bulletin,26:476-481.
Johansen ?,Rye H,Cooper C,2003.DeepSpill--field study of a simulated oil and gas blowout in deep water. Spill Science & Technology Bulletin,8(5):433-443.
Karafyllidis I,1997.A model for the prediction of oil slick movement and spreading using cellular automata.Environment international,23(6):839-850.
Klemas V,2010.Tracking oil slicks and predicting their trajectories using remote sensors and models: case studies of the Sea Princess and Deepwater Horizon oil spills.Journal of Coastal Research,789-797.
Li X,Chen Y M,Liu X P, et al,2011.Concepts,methodologies,and tools of an integrated geographical simulation and optimization system.International Journal of Geographical Information Science, 25(4):633-655.
Li X,Yeh A G O,2004.Data mining of cellular automata′s transition rule.International Journal of Geographical Information Science, 18(8):723-744.
Li X,Yeh A G O,2002.Integration of principal components analysis and cellular automata for spatial decisionmaking and urban simulation.Science in China,Ser.D,45(6):521-529.
Li X, Yeh A G O, 2002. Neural-network-based cellular automata for simulating multiple landuse changes using GIS. International Journal of Geographical Information Science,16(4):323-343.
Liu X P,Li X,Liu L,et al,2008.A bottom-up approach to discover transition rules of cellular automata using ant intelligence.International Journal of Geographical Information Science,22(11):1247-1269.
Ru?inovi? Z, Bogunovi? N, 2006. Cellular automata based model for the prediction of oil slicks behavior.
Shi L J,Ivanov A Y,He M X,et al,2008.Oil spill mapping in the western part of the East China Sea using synthetic aperture radar imagery.International Journal of Remote Sensing,29(21):6 315-6 329.
Shyue S W,Sung H C,Chiu Y F,2007.Oil spill modeling using 3D cellular automata for coastal waters.International Society of Offshore and Polar Engineers.
Wang S D,Shen Y M,Zheng Y H,2005.Two-dimensional numerical simulation for transport and fate of oil spills in seas.Ocean Engineering,32(13):1556-1571.
Wu F,2002.Calibration of stochastic cellular automata:the application to rural-urban land conversions.International Journal of Geographical Information Science,16(8):795-818.
李維乾,解建倉(cāng),李建勛,等,2013.基于元胞自動(dòng)機(jī)與智能體的水污染可視化模擬仿真.西北農(nóng)林科技大學(xué)學(xué)報(bào)(自然科學(xué)版),41(3):213-220.
廖國(guó)祥,楊建強(qiáng),高振會(huì),2011.深海環(huán)境中溢油輸移擴(kuò)散的初步數(shù)值模擬.海洋通報(bào),30(6):707-712.
牟林,鄒和平,武雙全,等,2011.海上溢油數(shù)值模型研究進(jìn)展.海洋通報(bào),30(4):473-480.
王璐,謝能剛,李銳,等,2009.基于元胞自動(dòng)機(jī)的水體污染帶擴(kuò)散漂移仿真.水利學(xué)報(bào),40(4):481-485.
莊學(xué)強(qiáng),陳堅(jiān),孫倩,2007.海面溢油數(shù)值模擬及其可視化實(shí)現(xiàn)技術(shù).中國(guó)航海,1:97-100.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
