基于STM32的四旋翼無(wú)人飛行器控制系統(tǒng)
2015-03-27 12:11:26長(zhǎng)江大學(xué)電子信息學(xué)院鄧其龍朱耀鐘
電子世界 2015年19期
關(guān)鍵詞:系統(tǒng)設(shè)計(jì)
長(zhǎng)江大學(xué)電子信息學(xué)院 鄧其龍 朱耀鐘
前言
近年來(lái),四旋翼無(wú)人飛行器日益受到了研究人員的關(guān)注。由于四旋翼無(wú)人飛行器具有垂直起降、可攜帶遠(yuǎn)程設(shè)備、控制靈活等優(yōu)點(diǎn),目前已廣泛應(yīng)用于影視、消防、農(nóng)業(yè)、電力系統(tǒng)等領(lǐng)域。
本研究在當(dāng)前的四旋翼無(wú)人飛行器控制理論與技術(shù)基礎(chǔ)上,選用意法半導(dǎo)體的32位STM32系列微處理器,采用數(shù)字三軸陀螺儀MPU6050等傳感器設(shè)計(jì)了硬件系統(tǒng),利用仿真工具M(jìn)ATLAB設(shè)計(jì)了非線性控制器-模糊PID控制器,并在此基礎(chǔ)上搭建了硬件實(shí)驗(yàn)平臺(tái),最終完成了預(yù)期設(shè)計(jì)目標(biāo)。
1 系統(tǒng)工作原理和結(jié)構(gòu)框架
1.1 四旋翼飛行器工作原理
四旋翼無(wú)人飛行器使用四個(gè)獨(dú)立的無(wú)刷電機(jī)作為系統(tǒng)的動(dòng)力系統(tǒng),四個(gè)電機(jī)分別安裝在十字機(jī)架的四個(gè)頂端位置,把同一對(duì)角線上的兩個(gè)電機(jī)分為一組,當(dāng)旋翼1和旋翼3逆時(shí)針旋轉(zhuǎn)時(shí),可以產(chǎn)生逆時(shí)針?lè)较虻呐ぞ兀划?dāng)旋翼2和旋翼4順時(shí)針旋轉(zhuǎn)時(shí),產(chǎn)生的扭矩是順時(shí)針?lè)较颍@樣四個(gè)電機(jī)的反扭矩會(huì)被相互抵消,因此通過(guò)控制四個(gè)電機(jī)的轉(zhuǎn)速就能控制四旋翼無(wú)人飛行器的飛行姿態(tài)。其結(jié)構(gòu)模型如圖1所示。四旋翼飛行器在三維空間內(nèi)共有六個(gè)自由度,飛行器的飛行狀態(tài)主要包括垂直運(yùn)動(dòng)、俯仰飛行、橫滾飛行以及偏航飛行。
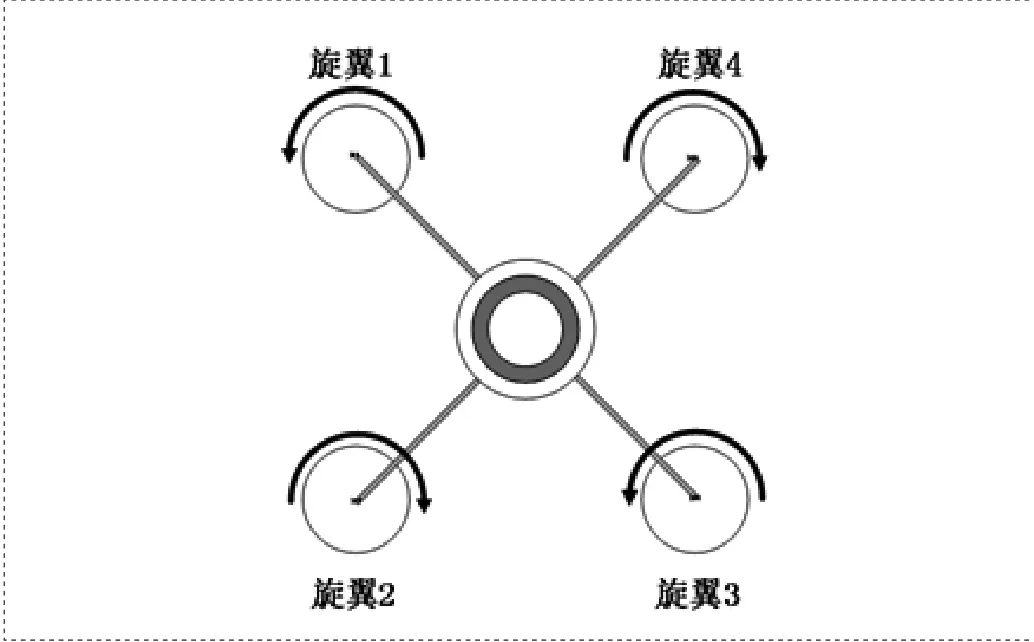
圖1 四旋翼無(wú)人飛行器結(jié)構(gòu)圖
1.2 控制系統(tǒng)總體框架
四旋翼無(wú)人飛行器的飛行控制系統(tǒng)由傳感器、MCU、電調(diào)和電源四大部分組成。傳感器用來(lái)測(cè)量四旋翼無(wú)人飛行器飛行時(shí)與姿態(tài)有關(guān)的數(shù)據(jù),主控制器根據(jù)這些數(shù)據(jù)、內(nèi)置狀態(tài)和地面遙控指令進(jìn)行綜合分析處理 ,然后輸出4路 PWM脈沖控制電調(diào)從而改變電機(jī)轉(zhuǎn)速,實(shí)現(xiàn)預(yù)期的飛行姿態(tài)。
2 系統(tǒng)硬件設(shè)計(jì)
本設(shè)計(jì)采用意法半導(dǎo)體的STM32F103ZET6作為系統(tǒng)的主控制器,高達(dá)72MHz主頻,具備DMA單元,有多達(dá)24路的PWM輸出和12位高精度ADC。它主要負(fù)責(zé)傳感器數(shù)據(jù)采集,數(shù)據(jù)處理,姿態(tài)解算算法,PID算法以及遙控信號(hào)的解碼用來(lái)接收和發(fā)送數(shù)據(jù)和命令。控制系統(tǒng)結(jié)構(gòu)圖如圖2所示。
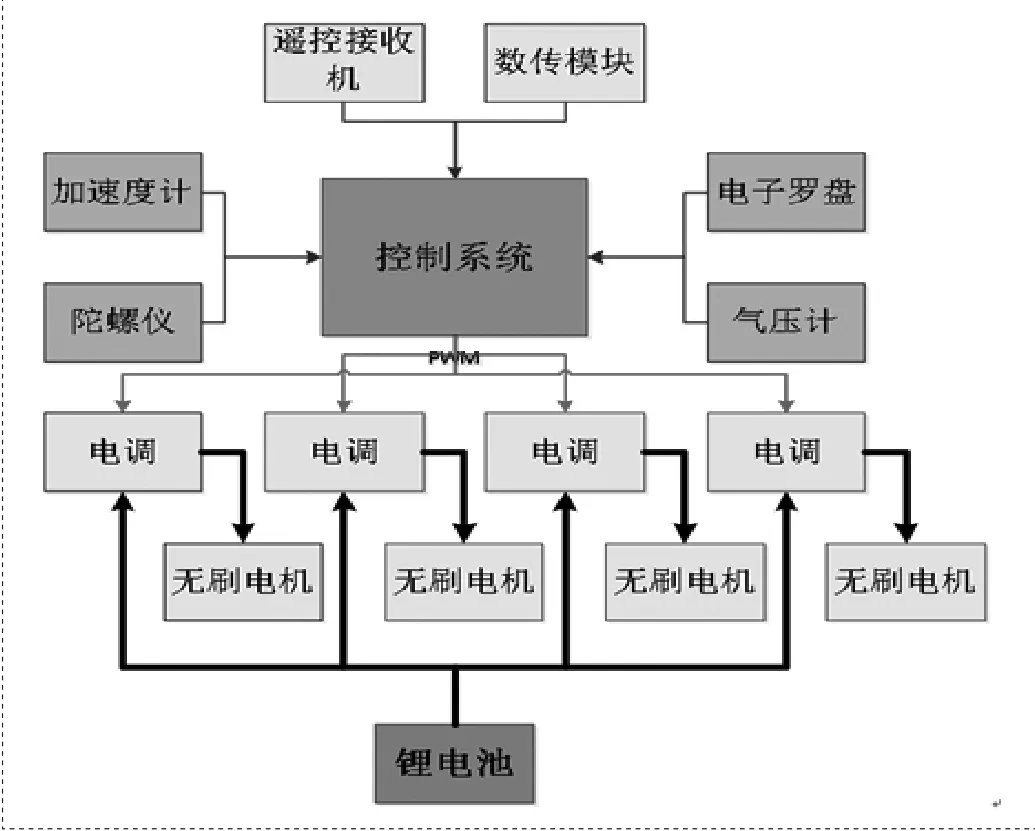
圖2 控制系統(tǒng)結(jié)構(gòu)
2.1 傳感器模塊
四旋翼無(wú)人飛行器的飛行姿態(tài)可以用6個(gè)物理量表示,即三維坐標(biāo)中的3個(gè)位置量和沿3個(gè)軸的姿態(tài)量,稱為六自由度。陀螺儀的作用是測(cè)量四旋翼飛行器的角速率,在慣性導(dǎo)航系統(tǒng)中非常重要,陀螺儀選型的依據(jù)是精度和穩(wěn)定性。選用應(yīng)美盛公司的MPU6050,MPU6050整合了3軸陀螺儀、3軸加速器計(jì)。MPU6050的角速度全格感測(cè)范圍設(shè)定為±250/sec(dps),可準(zhǔn)確追蹤快、慢速動(dòng)作,該傳感器傳輸可透過(guò)最高至400kHz的I2C接口,可以精確采集四旋翼飛行器3個(gè)方向的角速率和線加速度。由于導(dǎo)航參數(shù)會(huì)隨傳感器的測(cè)量誤差積累而發(fā)散,因此在慣性導(dǎo)航算法中不能長(zhǎng)時(shí)間自主飛行,故選用霍尼韋爾公司的三軸式數(shù)字羅盤(pán)HMC5883校準(zhǔn)慣性導(dǎo)航系統(tǒng)的姿態(tài),HMC5883采用I2C通信協(xié)議,無(wú)需額外的轉(zhuǎn)換電路即可和STM32的硬件I2C接口通信。
2.2 無(wú)線通信模塊
無(wú)線通信模塊是四旋翼無(wú)人飛行器和地面遙控通信的橋梁。本研究要求的無(wú)線傳輸距離小于100m。利用nRF24L01+進(jìn)行無(wú)線通信,它是一款工作在2.4~2.5GHz世界通用ISM 頻段的單片無(wú)線收發(fā)器芯片。通過(guò)SPI接口與MCU連接,速率0~8Mbps,支持2Mbps、1Mbps和250kbps傳輸速率,支持自動(dòng)應(yīng)答及自動(dòng)重發(fā),內(nèi)置地址及CRC數(shù)據(jù)校驗(yàn)?zāi)9δ堋J褂梅奖悖?00m之內(nèi)傳輸穩(wěn)定可靠。最終可實(shí)現(xiàn)遙控裝置與飛行控制器的通信要求。
2.3 電機(jī)控制模塊
本研究采用自主開(kāi)發(fā)的電調(diào)控制無(wú)刷電機(jī)。STM32輸出PWM脈沖信號(hào)控制電調(diào),對(duì)電機(jī)轉(zhuǎn)速進(jìn)行調(diào)整,從而控制飛行姿態(tài)。控制方式為調(diào)整輸出PWM周期為10ms,停車為1ms高電平,最大油門(mén)值為2ms高電平。
3 系統(tǒng)軟件設(shè)計(jì)
四旋翼無(wú)人飛行器是一個(gè)欠驅(qū)動(dòng)系統(tǒng),它具有4輸入6輸出。由于四旋翼無(wú)人飛行器對(duì)稱的結(jié)構(gòu)設(shè)計(jì),使得四軸在俯仰角的控制與橫滾角的控制上有著近乎相同的控制特性,且兩者相對(duì)獨(dú)立。四軸飛行器的俯仰,橫滾,偏航,升降可以通過(guò)四個(gè)輸入量來(lái)控制。飛行控制系統(tǒng)微處理器主要完成各個(gè)模塊的初始化、系統(tǒng)自檢、解算傳感器數(shù)據(jù)、遙控信息解算、執(zhí)行控制算法、計(jì)算并輸出控制量等功能。通過(guò)信號(hào)量和消息隊(duì)列實(shí)現(xiàn)了各任務(wù)間數(shù)據(jù)的相互交換和同步。
4 結(jié)束語(yǔ)
本研究用STM32單片機(jī)作為系統(tǒng)的控制器,利用Mat l ab模糊工具箱設(shè)計(jì)了模糊PID控制器,并給出了基于STM32單片機(jī)的四旋翼無(wú)人飛行器控制系統(tǒng)的硬、軟件設(shè)計(jì)方案,通過(guò)實(shí)際搭建硬件測(cè)試平臺(tái),達(dá)到了預(yù)期的設(shè)計(jì)目標(biāo)。
[1]聶博文.四旋翼飛行器的研究現(xiàn)狀與關(guān)鍵技術(shù)[J].電光與控制,2007,14(6):113-117.
[2]朱君.四旋翼無(wú)人飛行器控制系統(tǒng)設(shè)計(jì)及控制方法研究[D].內(nèi)蒙古科技大學(xué)碩士學(xué)位論文,2012.
[3]孫怡.基于模糊PID控制的多電機(jī)同步控制[D].華南理工大學(xué)碩士學(xué)位論文,2012.
[4]李俊,李運(yùn)堂.四旋翼飛行器的動(dòng)力學(xué)建模與PID控制[J].遼寧工程技術(shù)大學(xué)學(xué)報(bào),2012,31(1):114-117.
[5]黃溪流.四旋翼無(wú)人直升機(jī)飛行控制器的設(shè)計(jì)[D].南京:南京理工大學(xué),2010.
[6]齊書(shū)浩.四旋翼飛行器總體設(shè)計(jì)及其運(yùn)動(dòng)控制[D].上海: 上海交通大學(xué),2013.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
