可信可控網絡中的一致性視圖構建機制*
2015-03-27 07:06:15曹生林柳立言
計算機工程與科學 2015年1期
曹生林,柳立言
(寧夏師范學院數學與計算機科學學院,寧夏 固原 756099)
可信可控網絡中的一致性視圖構建機制*
曹生林,柳立言
(寧夏師范學院數學與計算機科學學院,寧夏 固原 756099)
在可信可控網絡中利用多個控制節點對AS進行聯合控制,容易造成多個控制節點在網絡控制過程中持有的AS視圖不一致問題。針對該問題,在可信可控網絡模型的基礎上提出了基于選舉算法的AS內一致性視圖構建機制,該機制首先基于選舉算法選舉出主控制節點,然后主控制節點根據AS內各個控制節點的負載,將視圖構建任務分配給負載最低的控制節點負責構建視圖,并利用主控制節點的時間對生成的視圖的版本進行界定,從而避免了多個控制節點獨自構建視圖造成的視圖混亂問題。仿真實驗的結果表明,所提出的一致性視圖構建機制具有良好的性能。
可信可控網絡模型;選舉算法;一致性視圖
1 引言
可信可控網絡將網絡控制邏輯的計算集中到控制節點CN(Control Node)上,以便對網絡建立統一的網絡控制層面。但是,由于單一控制節點容易導致性能瓶頸和單點故障問題,為了提高可信可控網絡的可擴展性,在自治系統AS(Autonomous System)內采用多控制節點對網絡進行協同控制已成為相關研究者的共識[1,2]。
雖然在可信可控網絡中多個控制節點對網絡進行協同控制的方法能夠有效地提高可信可控網絡的可擴展性和魯棒性,但是也給可信可控網絡帶來了新的視圖一致性問題:在可信可控網絡中,每個控制節點在控制域內維護一個控制信息數據庫來保存本控制域的控制信息,而在每個控制節點上又運行著多個網絡控制機制,由于網絡延遲以及網絡震蕩性等原因,如果多個控制節點的多個控制機制都需要自己構建AS的網絡視圖,很容易造成視圖信息的不一致,從而導致不同網絡控制機制對網絡的控制策略產生矛盾,影響網絡的正常運行。
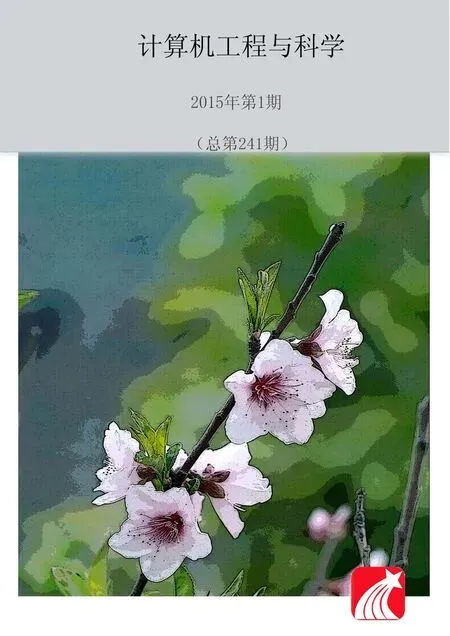
為了便于說明多個控制節點網絡視圖可能不一致的問題,我們給出了一個示例,如圖1所示,控制節點CN1和CN3分別在t1和t2時刻開始構建各自的網絡視圖,分別向除自身以外的所有控制節點發送其他控制域的視圖請求。而在CN1和CN3構建網絡視圖的過程中,CN4負責的控制域的網絡狀態在t3時刻發生了變化,由于CN1與CN4的網絡延遲較長,使得CN4給CN1返回的網絡視圖發生在t3以后,而由于CN3與CN4的網絡延遲較短,使得CN3在t3時刻之前就返回了其局部視圖,這就會造成CN1在t5得到的視圖與CN3在t4時刻得到的視圖不一致。而由于CN3與CN2間的通信延遲,造成CN3得到視圖的時刻t4晚于CN1得到視圖的時刻t5,這就造成生成時刻較晚的視圖反而不如生成時刻較早的視圖準確性高。
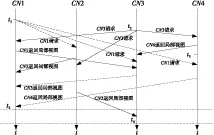
Figure 1 Network view constructed by control nodes respectively
從上述示例可以看出,由每個控制節點單獨生成視圖會造成視圖的一致性問題,主要表現為兩個方面:
(1)控制節點的視圖與網絡真實狀態不一致。由于分布式網絡環境下傳輸時延和計算耗費時間等原因,很難構造與網絡實際狀態嚴格吻合的視圖,網絡視圖與網絡實際狀態必然會存在一個時間差。為了解決這一問題,一般采用不斷更新視圖版本的方法來反映網絡的實際狀態。因此,這個問題可以歸結為,多個控制節點組成的分布式網絡環境下,缺少全局時間對網絡視圖進行版本界定,造成網絡視圖版本前后不一致的問題。如圖1給出的例子中,CN3在t4時刻得到的視圖不如CN1在t5(t4>t5)時刻得到的視圖準確,就是新老視圖的不一致性問題。
(2)多個控制節點的視圖互相矛盾。由于不同控制節點獨自構建視圖,造成視圖來源混雜,從而導致網絡視圖混亂,很難判斷它們所構建視圖的正確性。如圖1給出的例子中,CN3得到的視圖沒有反映t3時刻以后CN4對應的控制域內的網絡狀態變化,與CN3得到的視圖矛盾。
因此,為了解決上述的視圖版本前后不一致問題和不同控制節點視圖不一致問題,本文給出了可信可控網絡中的一致性視圖構建機制,該機制主要由主控制節點選舉算法和基于選舉的一致性視圖構建算法兩部分組成。其主要思想是,當網絡控制機制提出一致性視圖構建需求時,其所在的控制節點將任務提交給選舉算法產生主控制節點;然后主控制節點根據控制節點的優先級將任務分配給優先級最高的節點處理,負責處理的控制節點組織多個控制節點基于合作的方式構建一致性視圖后,將最終的處理結果發送給主控制節點;主控制節點再將處理結果發送給請求方。這保證了多個控制節點的網絡視圖源一致,解決了多個控制節點的視圖不一致問題,并且通過利用主控制節點的時間戳作為版本號的方式,避免了網絡視圖前后版本的不一致性。
2 AS內的主控制節點選舉算法
基于選舉算法的一致性視圖構建機制主要通過為AS選出主控制節點的方法為多個控制節點的網絡視圖提供統一的版本界定方法和視圖來源。在本節中,我們將根據可信可控網絡的特點,為多個控制節點構建一個主控制節點選舉算法。
選舉算法是分布式系統中常用的算法,其從進程集合中選出一個特定的進程來對特定任務進行處理,以實現多個進程之間的協作。選舉算法應用的領域很多,如群服務器、重復數據更新、負載均衡、應急恢復以及互斥等方面。根據不同網絡的拓撲類型,人們提出了不同的分布式選舉算法[3]。一般情況下選舉過程可以分成兩個階段:(1)選擇具有最高優先級的優勝者;(2)通知其他參與者誰是優勝者。兩個階段都需要在系統中發布進程的ID,因此通過進程之間的通信方式可以將選舉算法分成兩種:面向廣播網的選舉算法[4]和面向存儲轉發網的選舉算法。其中面向存儲轉發網的選舉算法,又有面向單向環的選舉算法[5~7]、面向雙環的選舉算法[8]、面向完全圖的選舉算法[9]和面向弦環的選舉算法[10]。
根據上述在分布式網絡環境下的選舉算法,我們針對可信可控網絡中視圖構建的一致性需求和多個控制節點的負載均衡,基于bully算法[11]設計了可信可控網絡中的主控制節點選舉算法和基于合作的視圖構建算法。
由于在可信可控網絡中每個控制節點只有一個參與選舉的進程,為了便于理解,我們在后文中統一將參與選舉的對象確定為AS內的控制節點。
2.1 優先級定義
為了統一各個CN負載的評價標準,我們給出了一個以請求需要等待的時間作為衡量標準的方法,并選擇響應當前請求所需要的時間最短的CN作為處理當前請求的節點。每個節點對當前請求響應時間的計算方法如式(1)所示:
Ti=p*λi
(1)
其中,p表示在節點i上排隊的任務數,λi表示節點i處理一個任務所花費的平均時間。
利用Ti我們定義每個節點的優先級,如式(2)所示:
(2)
由式(2)可知,節點的響應時間越長,其優先級越低,當其響應時間為0時,表示該節點空閑,其節點優先級最高。
2.2 算法介紹
為了能響應用戶提出的請求,我們將CN分成主控制節點PCN(PrimaryControlNode)和從控制節點SCN(SecondaryControlNode),PCN負責進行任務管理,SCN負責對用戶的任務進行處理,處理某個用戶請求的SCN成為當前任務的責任節點。在一個AS內的多個CN組成了一個服務組響應用戶請求,并通過選舉算法選出一個PCN。每個CN都有自己的一個公共組播地址和私有IP。
經典的bully算法是一個可靠的選舉算法,我們設計了基于bully的選舉算法,過程如下:
CN進入選舉狀態后,向其他CN發送選舉組播包,并啟動定時器T1,等待 AS中其它CN的響應包。當節點發現有更高優先級選舉CN時,就自動設置狀態為SCN狀態。如果在T1時間內,沒有收到更高優先級CN的選舉包,則設置狀態為PCN狀態。
在SCN狀態,CN啟動一個定時器T2,如果在T2允許的時間內獲得PCN發來的輪詢包,就作出響應,并更新CN優先級隊列,將PCN發送來的任務加入任務隊列。如果在定時器T2允許之內沒有獲得PCN發來的輪詢包,則進入選舉狀態。如果在T2允許的時間內收到其它SCN的選舉包,則先比較負載,若自身的負載比較低,則進入選舉狀態。
進入PCN狀態后,首先停止自己的任務并將任務移送至CN優先級隊列中優先級高的CN上,然后開始監控整個AS中其他SCN的狀態。監控過程為:啟動定時器T3,并向所有SCN發送輪詢包,收集SCN的狀態和任務信息。如果有新任務,就將任務分配給最高優先級的CN,并更新SCN優先級隊列,然后將形成的新的SCN隊列和任務信息發送至SCN。如果在T3允許的時間內又有新的選舉包到來,就發送回復中止其選舉。
為了更好地說明選舉算法的過程,我們給出了主節點選舉算法的偽代碼,具體如下:
select(IP){ //選舉函數
send(SELECT,allCN,IP);/*向其他CN發送選舉組播包*/
T1.val=0 //啟動計時器T1
wait(T1);
if(have_receive(higher_priority_CN)){/*當節點發現有更高優先級選舉CN時,就自動設置狀態為SCN狀態*/
state=SCN;
}else{
state=PCN;/*如果沒有收到更高優先級節點的選舉包,則自己成為PCN*/
send(task,highest_prirority_CN_in_priqueue)
}
}
根據上述選舉過程,圖2給出了相應的狀態轉移圖。節點的狀態可以分成三種:選舉態、PCN態和SCN態。每個CN都維持一個守護進程,在正常情況下,一個AS內有一個PCN,當節點剛加入時,默認設置為SCN狀態。
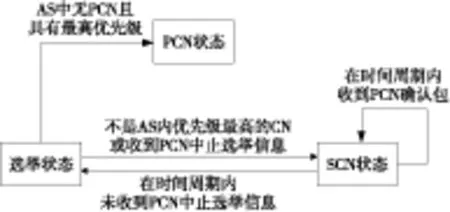
Figure 2 State transition of CN in AS
3 基于選舉的一致性視圖構建算法
3.1 SCVCA算法介紹
第2.2節中,我們給出了AS內主控制節點的選舉算法,在本節中我們基于選舉算法的選舉結果,并根據網絡視圖的一致性需求和控制節點之間的負載均衡需求,提出一致性視圖構建算法SCVCA (Selection-based Consistant View Contruciton Algorithm),對用戶(網絡控制機制)提交的網絡視圖構建任務進行統一處理。其主要思想是,需要構建AS內一致性視圖的用戶統一向主控制節點提交一致性視圖構建請求;主控制節點將任務分配給從控制節點進行處理,同時設定一個任務等待時間,并在視圖構建任務完成前將提交一致性視圖構建請求的用戶放在等待隊列中,當一致性視圖構建任務處理完成后,一次性將一致性視圖交付給等待隊列中的用戶;而從控制節點根據主控制節點分配的任務構建該控制域的局部視圖后,由其中一個從控制節點對這些局部視圖進行綜合后提交給主控制節點。為了更清楚地說明處理過程,我們給出了一致性視圖構建算法的步驟,具體如下:
(1)由于AS內的每個控制節點都知道本AS內的主控制節點的地址,當運行在某一控制節點上的網絡控制機制產生一致性視圖構建需求時,該網絡控制機制向AS的主控制節點PCN提交網絡一致性視圖構建請求ViewRequest1,并設定一個時間QT,如果在QT時間內沒有收到PCN的一致性視圖構建結果,則構建視圖失敗。
(2)AS的主控制節點PCN維持一個視圖請求等待隊列VQueue和一個視圖構建計時器PViewtimer。當PCN接收到ViewRequest1后,檢查VQueue中是否存在正在等待的其他節點的視圖處理請求,如果沒有,則生成一個視圖構建任務ViewTask1,為該任務生成一個唯一的任務標識TaskID,并將ViewRequest1添加到VQueue中,同時將PViewtimer清零;如果有,則僅將ViewRequest1添加到VQueue中。生成網絡一致性視圖構建任務ViewTask1后,PCN查看其維護的控制節點優先級隊列,然后從優先級隊列中選出具有最高優先級的從控制節點SCN1;然后將網絡一致性視圖構建任務ViewTask1和任務標識TaskID分配給從控制節點SCN1,并設定PViewtimer的等待時間為PT以等待SCN1返回處理結果;如果PT時間內沒有獲得SCN1的一致性視圖構建結果,則構建視圖失敗。其中由于從控制節點SCN1負責對ViewTask1任務的處理,我們稱從控制節點SCN1為責任從處理節點RSCN(Response Secondary Control Node)。
(3)RSCN收到主控制節點PCN分配的網絡一致性視圖構建任務ViewTask1和任務標識TaskID后,向其他從控制節點SCN發送網絡一致性視圖合作構建請求CorRequest2和任務標識TaskID,并設定等待時間RT等待其他從控制節點SCN返回處理結果;同時,RSCN根據ViewTask1的需求構建本控制域的局部視圖,如果其中存在一個協助構建視圖的從控制節點沒有在RT時間內完成局部視圖構建,則一致性視圖構建任務失敗。其中除了RSCN以外的參與到任務ViewTask1處理的從控制節點的任務是協助RSCN構建AS的一致性視圖,因此我們將這些從控制節點稱為協助從控制節點JSCN(Joint Secondary Control Node)。
(4)JSCN接收到處理任務CorRequest2和任務標識TaskID后,根據ViewTask1任務的需求構建相應控制域的局部視圖,并將結果和任務標識TaskID反饋給RSCN。
(5)RSCN收到各個JSCN的處理結果和任務標識TaskID后,檢查任務標識TaskID是否與當前處理的任務的標識一致,如果不一致則丟棄,如果一致則繼續執行:如果每個JSCN的局部構建視圖成功,則綜合各個控制域的局部網絡視圖生成AS的一致性視圖,并將該視圖反饋給主控制節點;如果存在一個JSCN構建視圖失敗,則向PCN反饋構建一致性視圖失敗的信息。
(6)主控制節點收到處理結果和任務標識TaskID后,如果任務標識TaskID與當前處理任務一致,則將一致性視圖的構建結果反饋給提出請求網絡控制機制,否則將收到的結果丟棄,并繼續等待。
圖3給出了AS一致性視圖構建過程示意圖,圖中的AS劃分為五個控制域,對應有五個控制節點,用戶(網絡控制機制)提出構建視圖的請求后,其構建過程按照上面的步驟在圖中標出。
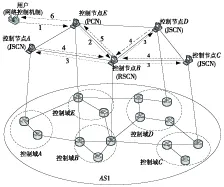
Figure 3 AS consistent view construction
另外值得說明的是,由于分布式網絡環境的網絡延遲以及視圖計算的時間耗費等原因,嚴格實時的網絡一致性視圖是很難構建的,網絡視圖與網絡實際狀態必然會存在一個時間差,所以一般采用不斷更新視圖版本的方法來反映網絡的實際狀態。為了防止網絡一致性視圖由于時間延遲原因造成網絡控制的混亂,我們在可信可控網絡中都以AS主控制節點的時間為準,對主控制節點生成的每個視圖以一個時間戳為標準生成視圖版本版本號,并以五元組(PCN,View,Vision,RequestTime,ViewGenerateTime)對視圖進行標識,以避免網絡新老視圖的不一致問題。該五元組表示主控制節點PCN在RequestTime時刻接到用戶請求后,在ViewGenerateTime時刻構建成功的版本Vision的網絡視圖View,其中的RequestTime和ViewGenerateTime都是以PCN的時間為標準。該五元組利用PCN的局部時間完成了對網絡視圖進行統一的版本界定,能夠保證各個控制節點之間的視圖不會產生矛盾。
由于PCN等待RSCN返回一致性視圖以及RSCN等待JSCN返回局部性視圖時都設定了固定的等待時限,等待超時就將視圖構建任務判為失敗,容易發生構建新版本視圖時收到舊版本的網絡視圖或者舊版本的局部視圖的情況,造成網絡視圖的混亂。為了解決這種情況,我們為每個視圖構建任務生成一個唯一的任務標識TaskID,在PCN收到RSCN返回一致性視圖和RSCN收到JSCN返回的局部視圖時都要檢查收到的結果的TaskID是不是與當前處理的任務的TaskID一致,如果不一致,則將收到的結果丟棄,只有收到的結果的TaskID與當前正在處理的任務的TaskID一致時才能接受。
3.2 算法分析
在第1節的需求分析中,我們給出了網絡一致性視圖構建需要解決的兩個問題:新老網絡視圖一致性問題和不同控制節點的視圖不一致性問題。針對這兩個問題,我們將針對基于選舉的一致性視圖構建算法構建的視圖進行一致性分析。
在上節給出的一致性視圖構建算法中,每個AS的主控制節點PCN是該AS視圖的唯一源頭,并且以PCN的局部時間作為視圖版本界定的標準,解決了視圖版本前后矛盾和多個控制節點不一致的問題。利用基于選舉的一致性視圖構建算法生成的視圖具有兩個性質:
性質1 將用戶請求按照PCN的局部時間排序后,請求時間較晚的用戶獲得的視圖(PCN,ViewB,VisionB,tB,vtB)的版本一定不低于請求時間較早的用戶獲得的視圖(PCN,ViewA,VisionA,tA,vtA),即存在兩個視圖(PCN,ViewA,VisionA,tA,vtA)和(PCN,ViewB,VisionB,tB,vtB),如果tB≥tA,則vtB≥vtA,即VisionB≥VisionA。其中tA和tB是PCN接受任務處理請求的時刻。
證明 為了比較請求時間較晚的視圖和請求時間較早的視圖的版本高低,我們可以分成如下兩種情況討論:第一種情況是較晚的視圖請求到達時,較早的視圖請求正在被處理;第二種情況是較晚的視圖請求到達時,較早的視圖請求已經被處理完成。下面我們分成兩種情況討論
第一種情況:如圖4所示,PCN分別在tA時刻和tB接受了用戶A和用戶B的請求,由于用戶A的請求QA比用戶B的請求QB接受的時間早,因此PCN接受QA時創建一個一致性視圖構建任務,并設定時限PT等待視圖構建;而當PCN接受QB時,一致性視圖構建任務正在進行,視圖等待隊列Queue不為空,因此PCN僅將QB加入到等待隊列中,以此創建新的視圖構建任務。當視圖構建任務完成后,PCN同時將視圖發送給用戶A和用戶B,故vtB=vtA。
第二種情況:如圖4所示,PCN分別在時刻tA和tC接受了用戶A和用戶C的請求,由于PCN接受用戶C的請求QC時,用戶A的請求QA已經處理完成,很顯然,vtC>vtA。
所以,綜合上述兩種情況,性質得證。
□
性質2 將用戶獲得的視圖按照PCN的局部時間排序后,生成時間較晚的視圖的版本高于生成時間較早的視圖的版本,并且版本高的視圖比版本低的視圖準確。即兩個視圖(PCN,ViewA,VisionA,tA,vtA)和(PCN,ViewB,VisionB,tB,vtB),如果vtB≥vtA,則VisionB≥VisionA,并且VisionA和VisionB對應的網絡真實狀態(RealStateA,trsA)和(RealStateB,trsB)滿足trsB≥trsA。

Figure 4 Consistent view for multiple users based on the selection algorithm
證明 由于網絡視圖是由PCN統一構建的,并且視圖的構建時刻都是按照PCN的時間為標準的,因此構建時間較晚的視圖必然比構建視圖較早的視圖的版本高,即兩個視圖(PCN,ViewA,VisionA,tA,vtA)和(PCN,ViewB,VisionB,tB,vtB),如果vtB≥vtA,則VisionB≥VisionA。并且由于ViewB的構建時間比ViewA的構建時間晚,因此ViewB獲得的信息必然更新,即VisionA和VisionB對應的網絡真實狀態(RealStateA,trsA)和(RealStateB,trsB)滿足trsB≥trsA。
□
從上面兩個定理可以看出,在可信可控網絡中利用基于選舉的一致性視圖構建算法為多個控制節點統一構建網絡視圖的方法保證了網絡視圖的一致性。
4 多粒度視圖構建
在前文中,我們給出了在可信可控網絡的AS內為多個控制節點構建一致性視圖的算法。在可信可控網絡中,我們給出了可信可控網絡中控制信息描述模型[12],以及對這些信息進行存儲的控制信息數據庫。在本節中我們將基于該算法和可信可控網絡控制信息數據庫為AS內多個控制節點提供網絡設備粒度和網絡協議粒度的一致性視圖。
AS內設備粒度的一致性視圖構建:設備粒度的視圖構建主要為用戶提供以AS內網絡設備的鄰接關系為主體構建的網絡拓撲視圖。按照上文給出的一致性視圖構建方法,當用戶提出構建設備粒度視圖的請求后,主控制節點接受該請求,并將構建任務分配給優先級最高的RSCN負責構建視圖;RSCN將協調構建任務分配給各個JSCN后,各個JSCN分別在其負責的控制域內構建設備粒度的局部視圖,并返回給RSCN;RSCN根據各個JSCN返回的局部視圖構建AS內設備粒度的一致性視圖后,將一致性視圖返回給PCN;最后PCN將結果返回給發出請求的用戶。
AS內協議粒度的一致性視圖構建:協議粒度的視圖在網絡拓撲視圖的基礎上進行細化,將運行在傳輸網絡上的協議之間的通信關系在視圖上反映出來。由于協議粒度的視圖比設備粒度的視圖能夠更詳細地反映網絡狀態以及各個協議之間的依賴關系,因此構建協議粒度的一致性視圖對網絡管理和網絡控制更有幫助。可信可控網絡的的每個控制節點都對其負責的控制域內運行的協議狀態信息進行采集,并存儲在控制信息數據庫中,使得構建AS內的協議粒度的一致性視圖成為可能。AS內協議粒度的一致性視圖構建方法與設備粒度的視圖構建方法一樣,也是利用本節中給出的一致性視圖構建方法進行構建。
5 仿真實驗
在可信可控網絡網絡中,SCVCA保證了多個控制節點獲取AS內的一致性視圖。然而在多個控制節點對AS進行聯合控制的過程中,需要保證視圖能夠在較短的時間和較低的負載下構建。為了驗證SCVCA在構建時間和構建負載方面的性能,我們在仿真實驗環境下對SCVCA和每個控制節點單獨構建的方法SCM(SingleConstructionMethod)在時間和負載兩個方面進行比較。為了更好地驗證SCVCA的性能,本文利用仿真工具NS2構建了仿真實驗。為了檢驗SCVCA在不同網絡規模下的性能,隨機生成了四個m+n不同規模的實驗網絡環境,其中m表示控制節點的個數,n表示路由器的個數,網絡規模分別為3+8、5+26、8+57和12+105。
視圖構建所需要的時間直接影響到網絡控制的有效性。為了比較,我們在上述網絡環境下給出了SCVCA與SCM兩種算法的構建時間,如圖5所示。從圖5中可以看出,SCVCA構建視圖所需要的時間在各種網絡規模下都優于SCM,并且隨著網絡規模的增大和控制節點數量的增加,SCVCA構造視圖所需要的時間的增長速度也低于SCM。這是因為SCVCA通過主控制節點將構造任務分配給從控制節點共同構建視圖,從控制節點將自己控制的局部網絡生成視圖后返回主控制節點,這比SCM中將所有網絡信息都發送給請求節點大大降低了數據傳輸的時間和構造過程中的計算量,從而有效縮短了視圖構建的時間。

Figure 5 Construction time comparison of two kinds ofview generation algorithms under different network scale
多個控制節點構建視圖必然造成網絡傳輸的負擔,進行網絡視圖構建的算法必須具有良好的可擴展性,不能隨著網絡規模的增長而出現爆炸性的消息傳輸數量。為了比較SCVCA和SCM隨著網絡規模的增大和網絡中需要構建視圖的節點的數量的增加引起的網絡傳輸負載,我們給出了兩種算法在多種網絡規模下和多種需要構建視圖的節點比例下引起的網絡傳輸的消息數,如圖6所示。從圖6中可以看出,在各種情況下,SCVCA構建視圖造成的網絡消息數均明顯低于SCM的。這是因為SCVCA由主控制節點負責為全網的所有請求生成一次視圖,而SCM需要每個控制節點自己請求網絡視圖的構建信息來構建視圖,這勢必造成SCM構建視圖過程中隨著網絡規模和請求數的增加網絡信息傳輸量迅速增加。

Figure 6 Number of messages of two algorithms under different network scales
6 結束語
本文首先分析了在可信可控網絡中利用多個控制節點對一個AS進行聯合控制的情況,為多個控制節點提供一致性視圖的必要性,并給出了各個控制節點獨自構建網絡視圖造成的問題;然后針對這些問題,提出了可信可控網絡中為多個控制節點構建一致性視圖的機制,包括主控制節點的選舉算法和基于選舉的一致性視圖的構建算法,保證了視圖版本一致性,并對該算法構建的視圖的一致性進行了分析;最后在控制信息數據庫的基礎上,為控制節點提供了AS內設備粒度和協議粒度的一致性視圖。
本文解決的一致性視圖問題是可信可控網絡中多個控制節點對AS進行聯合控制的基礎,然而多個控制節點對AS進行有效控制還涉及到AS外信息的共享問題。為了更好地提高網絡控制的效率,建立多個控制節點AS間有效的信息共享機制將是非常有意義的工作。
[1]BouabeneG,JelgerC,TschudinC,etal.Theautonomicnetworkarchitecture(ANA)[J].IEEEJournalonSelectedAreasinCommunications, 2010,28(1):4-14.
[2]IqbalH,ZnatiT.Distributedcontrolplanefor4Darchitecture[C]∥ProcofGlobalTelecommunicationsConference, 2007:1901-1905.
[3]WuJie.Distributedsystemdesign[M].Beijing:MachineryIndustryPress, 2001.(inChinese)
[4]KingGT,GendreauTB,NiLM.Reliableelectioninbroadcastnetworks[J].JournalofParallelandDistributedComputing, 1989, 7(1):521-546.
[5]ChangEG,RobertsR.Animprovedalgorithmfordecentralizedextrema-findingincircularconfigurationsofprocessors[J].CommunicationsoftheACM, 1979,22(5):281-283.
[6]DolevD,KlaweM,RothM.AnO(nlogn)unidirectionaldistributedalgorithmforextremafindinginacircle[J].JournalofAlgorithms, 1982,3(3):245-260.
[7]PetersonGL.AnO(nlogn)unidirectionaldistributedalgorithmforthecircularextremaproblem[J].ACMTransactionsonProgrammingLanguagesandSystems,1982,4(4):758-762.
[8]FranklinWR.Onanimprovedalgorithmfordecentralizedextremafindingincircularconfigurationsofprocessors[J].CommunicationsoftheACM, 1982,25(5):336-337.
[9]KorachE,MoranS,ZabsS.Tightlowerandupperboundsforsomedistributedalgorithmsforacompletenetworkofprocessors[C]∥Procofthe3rdAnnualACMSymposiumonPrinciplesofDistributedComputing, 1984:199-205.
[10]MansB,SantoroN.Optimalelectionsinfaultyloopnetworksandapplications[J].IEEETransactionsonComputers, 1998,47(3):286-297.
[11]Garcia-MolinaH.Electionsinadistributedcomputingsystem[J].IEEETransactonsonComputers, 1982,C-31(1):48-59.
[12]WangP,LuoJZ,LiW,etal.Controlinformationdescriptionmodelandprocessingmechanisminthetrustworthyandcontrollablenetwork[C]∥Procofthe11thIFIP/IEEEInternationalSymposiumonIntegratedNetworkManagement(IM09), 2009:398-405.
附中文參考文獻:
[3] 吳杰. 分布式系統設計[M]. 北京:機械工業出版社,2001.
CAO Sheng-lin,born in 1976,MS,associate professor,his research interests include computer network management, and next generation network.

柳立言(1980-),女,寧夏隆德人,碩士,副教授,研究方向為計算機網絡管理、下一代網絡和信息技術。E-mail:nxlly@163.com
LIU Li-yan,born in 1980,MS,associate professor,her research interests include computer network, next generation network, and information technology.
A consistent view construction mechanism in trustworthy and controllable network
CAO Sheng-lin,LIU Li-yan
(College of Mathematics and Computer Science,Ningxia Teachers University,Guyuan 756099,China)
Multiple control nodes are used to control an AS coordinately in trustworthy and controllable networks, thus easily resulting in the problem of inconsistent AS views of different control nodes. To solve this problem, based on the trustworthy and controllable network model, an election algorithm based consistent view construction mechanism is proposed. Firstly, an election algorithm is used to generate a primary control node. Secondly, according to the loads of the control nodes in an AS, the primary control node assigns the view construction tasks to the control node with the lowest load. Thirdly, the version of the generated view is defined by the time of the primary control node. The mechanism avoids the problem of inconsistent views due to the individual view construction of different control nodes. Besides, the simulation experiment results show that the proposal has good performance.
trustworthy and controllable network model;selection algorithm;consistent view
1007-130X(2015)01-0070-08
2013-04-18;
2013-06-04基金項目:寧夏自然科學基金資助項目(NZ14278)
TP301
A
10.3969/j.issn.1007-130X.2015.01.011

曹生林(1976-),男,寧夏中寧人,碩士,副教授,研究方向為計算機網絡管理和下一代網絡。E-mail:nxcsl@163.com
通信地址:756099 寧夏固原市寧夏師范學院數學與計算機科學學院
Address:College of Mathematics and Computer Science,Ningxia Teachers University,Guyuan 756099,Ningxia,P.R.China
猜你喜歡
公民與法治(2022年5期)2022-07-29 00:47:28
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
歷史教學問題(2021年4期)2021-11-05 07:02:34
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
中國公共安全(2017年11期)2017-02-06 05:28:08
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
燕山大學學報(2015年4期)2015-12-25 02:19:49
創業家(2015年10期)2015-02-27 07:55:08