基于紋理特征驅動AdaBoost算法的海面場景分類
2015-03-29 02:10:56金代中高志峰
激光與紅外 2015年4期
戴 軍,金代中,高志峰
(西南技術物理研究所,四川 成都610041)
1 引言
隨著紅外探測器技術的快速發展,紅外成像系統在反艦精確制導武器上得到了廣泛地應用。在超低空飛行的反艦制導武器中,海面背景在紅外成像瞬時視場內占據了較大比例,是影響目標識別的主要因素。海面背景的紅外輻射特性與風、太陽、空氣濕度等多種自然條件有關。由于這些條件的無規則變化使得海面背景的紅外成像特性的復雜性遠大于艦船目標自身,直接關系到紅外成像制導或包含紅外制導的復合制導系統的探測、識別及抗干擾能力。
目前,在海面目標檢測、海天線提取等領域研究較多,常用目標檢測算法都是在一定干擾條件下,完成對目標的檢測,很難適應強干擾的海面背景。當海面背景形成強干擾時,檢測的虛警率大幅度提高,目標探測效果顯著下降。
基于海面紅外圖像紋理特征,利用Adaboost算法訓練強分類器,構建二叉決策樹,實現對海面場景的分類。實驗證明,該方法適應性廣、分類效果好,能提高紅外成像系統對場景的感知能力,為目標檢測算法的選取,紅外成像系統使用邊界以及復合制導的綜合決策提供依據。
2 海面場景紅外成像分析
通過對大量外場試驗數據進行統計分析,根據對目標識別跟蹤效果的影響程度,將海面場景分成三類:強亮帶干擾紋理、弱干擾紋理、干凈紋理。其中強亮帶干擾紋理對目標的自動識別和跟蹤影響較大,干凈海面背景對目標自動識別最有利。圖1為三類典型的海空背景紅外圖像。
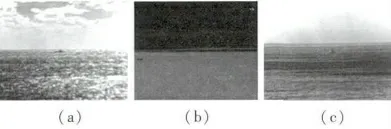
圖1 典型海空背景紅外圖像
當太陽位于一定天頂角時,由于海面的鏡面反射現象,會在海面形成一定區域的海面亮帶。當紅外探測器位于一定的觀測角度,就會形成很強的海面干擾圖像。此時的海面背景由大量起伏不定的高亮斑點組成,斑點的大小、亮度及疏密程度與浪高、陽光強度、太陽天頂角等自然條件有關,如圖1(a)所示。遠處的小目標很容易被背景干擾所淹沒,使得目標檢測算法失效。
理想條件下的平靜海面一般表現為大面積連續分布狀態,這時紅外圖像主體灰度起伏很小,如圖1(b)所示。在一定海情條件下,海面上會形成波浪紋理,一般表現為橫向條紋,如圖1(c)所示。
3 海面背景紅外圖像紋理特征提取
3.1 小波紋理特征
離散小波變換常用于紋理分類。采用Mallat快速小波分解算法[1]對圖像進行預處理。仿真結果(如圖2所示)可以看出,強干擾海面的各方向的高頻分量較強,而一般條件下海面高頻分量較弱,或在單個方向的高頻分量較強,理想干凈海面背景則各個方向的高頻分量都較弱。
計算小波分解后4個通道系數的能量和方差作為圖像的小波紋理特征。
3.2 Laws紋理特征
Laws紋理能量度量通過估計紋理中的平均灰度級、邊緣、斑點、波紋以及波形來確定紋理屬性[2-3]。常用的5×5模板的1-D矢量形式為:

圖2 小波分解系數圖
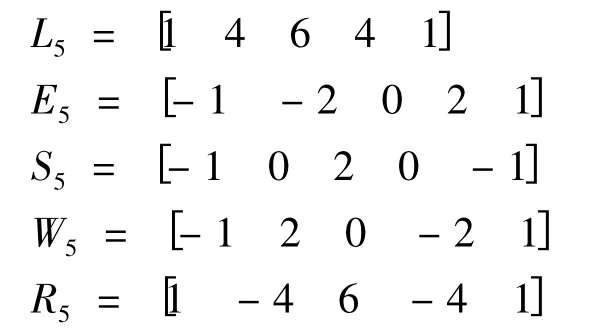
用這5個1-D模板與其自身以及互相卷積后,產生25個5×5的二維Laws掩模。將二維Laws掩模用于圖像可得到25個濾波圖像。計算濾波后圖像的能量和方差作為圖像的Laws紋理特征。
3.3 灰度共生矩陣紋理特征
灰度共生矩陣是基于在紋理中某一灰度級結構重復出現的情況,這個結構在精細紋理中隨著距離而快速地變化,而在粗糙紋理中則緩慢地變化[4-6]。
設圖像的灰度共生矩陣為P,d(g1,g2),它描述了在方向上間隔距離為d,具有灰度級g1和g2的兩個像素,在圖像中出現的頻率。基于歸一化的共生矩陣P可定義6個常用的紋理特征:能量、熵、對比度、倒數差分矩、方差和相關性。這6個特征分別描述了圖像均勻性、紋理清晰度和復雜度等特性。
4 采用AdaBoost算法構建分類器
4.1 AdaBoost算法
AdaBoost算法是一種迭代算法,其核心思想是針對同一個訓練樣本集訓練不同的弱分類器,然后把這些弱分類器以一定的權重集合起來,構成一個更強的強分類器。AdaBoost算法為每個訓練樣本引入一個權重,每次迭代訓練一個弱分類器使其在當前權重分布下分類錯誤率最低,在每次迭代完成后增加分類錯誤樣本的權重,降低分類正確樣本的權重,從而使下次迭代弱分類器的選擇更加重視錯誤樣本[7-8]。
AdaBoost算法的基本流程[9]如下:
給定訓練樣本(x1,y1)、…、(xn,yn),其中yi=0,1分別代表負樣本和正樣本。初始化每個樣本的權重為其中m、l分別是正樣本和負樣本的數量。
循環t=1,…,T:
· 權重歸一化;
· 對每個特征fj,訓練一個僅用這個特征的弱分類器hj。根據每個樣本xi當前權重wt,i計算這個弱分類器在訓練集上的分類誤差εt,j。
· 選擇具有最小分類誤差εt,j的分類器hj。
· 對所有的樣本xi更新權重:
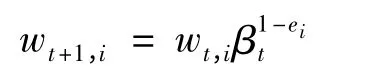
其中,如果分類正確,則ei=0;如果分類錯誤,則
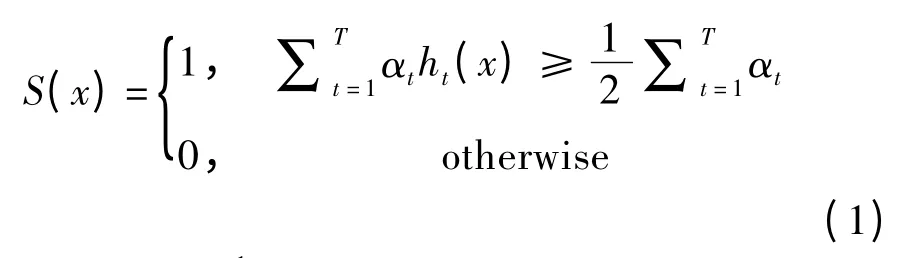
最終的強分類器為:
4.2 分類器構建
基本的AdaBoost算法只考慮了兩分類問題,通過建立兩級二叉樹結構分類器,實現三分類問題。其中每級二叉樹節點都是用AdaBoost算法訓練得到的強分類器。分類流程圖如圖3所示。

圖3 海面場景分類流程圖
在訓練S1強分類器時,將弱干擾和干凈海面背景樣本作為正樣本,強干擾海面背景樣本作為負樣本。在訓練S2強分類器時,將干凈海面背景樣本作為正樣本,弱干擾海面背景作為負樣本。
5 實驗設計與驗證
5.1 實驗樣本
在不同季節和光照條件下,在多個海域獲得紅外圖像。試驗采用中波紅外探測器,紅外成像設備的架設高度為5~15 m,紅外圖像為典型的海天背景。截取紅外圖像的海面背景部分作為樣本,樣本圖像的大小為284×57,灰度級為256級。表1是訓練、測試樣本類別及數目。

表1 試驗樣本組成
5.2 特征提取
提取三種類型的紋理特征作為AdaBoost算法的輸入。
小波紋理特征的提取:對樣本進行2層離散小波變換,計算每層變換4個通道系數的能量和方差作為樣本的小波紋理特征。
Laws紋理特征的提取:本文使用25個Laws濾波掩模,對樣本圖像進行濾波,并計算濾波后圖像的能量和方差,作為樣本的Laws紋理特征。
灰度共生矩陣有三個參數變量,分別是灰度級、方向和間隔。原始樣本圖像的灰度級為256,為減小灰度共生矩陣的計算量,將原圖像的灰度級變為64。試驗圖像中海面紋理方向多為橫向紋理,因此本文方向參數選擇0°和90°。間隔參數選擇4、8、12、16。對給定方向和距離構造樣本的共生矩陣,計算每個共生矩陣的6個特征量作為樣本的紋理特征。
通過上述三類紋理特征提取,每個樣本可獲得16個小波紋理特征,50個Laws紋理特征和48個共生矩陣紋理特征。
部分紋理特征在三類實驗樣本的分布如圖4所示。
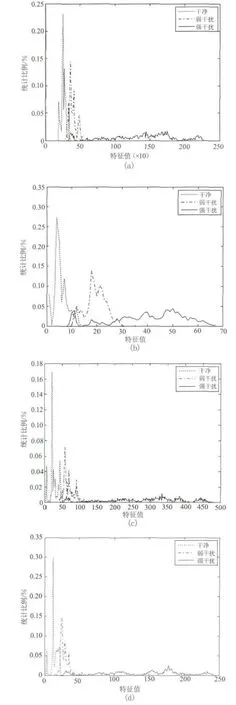
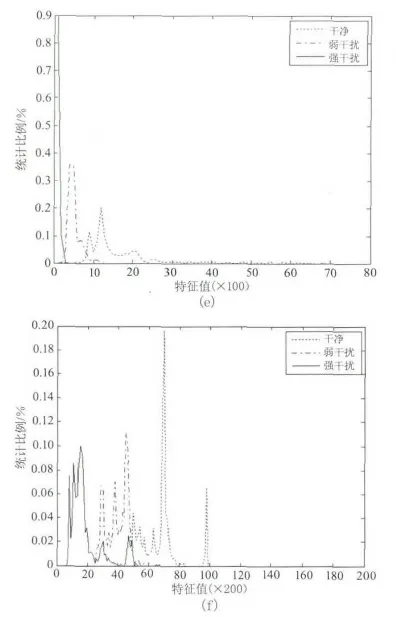
圖4 部分特征值在實驗樣本上的分布
其中,圖4(a)、(b)為小波紋理特征(1層小波水平方向系數能量特征和2層小波垂直方向系數能量特征);圖4(c)、(d)Laws紋理能量特征(掩模為E5E5和E5S5);圖4(e)、(f)灰度共生矩陣特征(0°共生矩陣相關性和倒數差分矩特征)。
圖4中,樣本本征分布相交越少的特征,其分類性能越好。其中圖4(e)特征分類效果相對較好,只基于該特征設計分類器,對弱干擾樣本和干凈樣本進行分類,其分類正確率為98.5%。圖4(b)特征分類效果相對較差,只基于該特征設計分類器,同樣對弱干擾樣本和干凈樣本進行分類,其分類正確率93.2%。
5.3 實驗結果
應用AdaBoost算法對訓練集樣本進行訓練,通過多次迭代,從114個特征中選擇出分類誤差最小的特征構建強分類器。表2給出了兩類強分類器的分類結果。
通過3次迭代,選擇出3個最優分類特征構建強分類器S1,可以達到很好的分類效果(正確率100%,虛警率0%)。通過5次迭代,選擇出5個最優分類特征構建強分類器S2,也達到較好的分類效果(正確率99.7%,虛警率0.56%)。
使用測試樣本集對兩種強分類器分類性能進行測試,都取得了好的分類效果。其中強分類器S1的分類正確率100%,虛警率0%;強分類器S2分類正確率99.12%,虛警率為0%。
通過實驗,驗證了引入AdaBoost算法,經過迭代訓練,使用較少紋理特征構建的強分類器能取得好的分類結果。

表2 兩類強分類器的分類結果
6 結論
實驗結果表明:通過提取三類紋理特征,引入AdaBoost算法進行最優特征選擇,構建強分類器,并通過二叉樹結構實現對海面場景的分類方法,適應能力較強,能對多種復雜的海面場景取得較好的分類結果。
[1] Mallat SG.A theory of multiresolution signal decomposition:the wavelet representation[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1989,11:674-693.
[2] Laws K I.Texture energy measures[J].In DARPA Image Understanding Workshop,Los Angeles CA,Los Altos,CA,1979:47-51.
[3] Wu CM,Chen Y C,Hesieh K S.Texture features for classification of ultrasonic liver images[J].IEEE Transactions on Medical Imageing,1992,11:141-152.
[4] Haralick R M,Shanmugan K,Dinstein I.Textural features for image classification[J].IEEE Transactions on Systems,Man and Cybernetics,1973,3:610-621.
[5] Gotlieb C C,Kreyszig H E.Texture descriptors based on co-occurrence matrices[J].Computer Vision,Graphics,and Image Processing,1990,51(1):70-86.
[6] LI Gang,XIONG Yazhou,LIU Kangke,et al.Water wave detection based on texture characteristics[J].Application Research of Computer,2013,20(4):1226-1229.(in Chinese)李剛,熊亞洲,劉康克,等.一種基于圖像紋理特征的波浪檢測方法[J].計算機應用研究,2013,20(4):1226-1229.
[7] Freund Y.Schapire R E.A decision-theoretic generalization of on-line learning and an application to boosting[J].Journal of Computer and System Sciences,1997,55(1):119-139.
[8] ZHANG Yujin,et al.Subspace-based face recognition[M].Beijing:Tsinghua University Press,2009.(in Chinese).章毓晉,等.基于子空間的人臉識別[M].北京:清華大學出版社,2009.
[9] Viola P,Jones M.Robust real-time object detection[J].International Journal of Computer Vision,2004,57(2):137-154.
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
當代陜西(2020年14期)2021-01-08 09:30:42
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
