網絡控制系統的性能仿真研究
2015-04-09 12:35:54杜成林張旭輝吳海雁趙友軍婁伶俐
重型機械 2015年4期
關鍵詞:系統
杜成林,張旭輝,吳海雁,趙友軍,婁伶俐
(1.西安重工裝備制造集團有限公司,陜西 西安 710054;2.西安煤礦機械有限公司,陜西 西安 710032)
0 前言
在現代煤礦生產中網絡系統是煤礦企業信息無縫集成的紐帶,也是遠程控制甚至實現少人或無人工作面的關鍵[1]。分布式環境下的控制系統由被控對象、傳感器、控制器、執行器、以及數字通信網絡組成。系統通過通信網絡傳輸檢測、控制、協調和指令等信號,而估計、控制和診斷等功能在不同的分布式網絡節點中進行。根據不同的通信網絡狀況,時延、丟包等現象對基于網絡的控制系統性能影響巨大。在系統設計分析時若不考慮這些問題,會降低系統的控制性能,甚至導致系統的不穩定[2][3]。因此,工業以太網用于實時控制場合時,研究者更關心的是網絡傳輸環境下被控系統的性能。
通過采用縮小沖突域、流量控制、提高智能設備或通信處理單元的性能、實時通信協議等措施可以得到一定的保障[4]。但是由于網絡時間和空間上的復雜性,分布式網絡、節點的數據獲取困難,搭建實驗臺模型受限、易破壞、難以重用,且費用高,對網絡控制系統的性能進行定量評價難度較大。借助網絡模擬仿真軟件對控制系統進行分析、研究和設計是一種快速而經濟的輔助手段[5]。本文借助仿真方法,研究網絡時延、采樣速率和網絡信息傳遞時間間隔等因素對網絡控制系統實時性能的影響,并通過網絡性能綜合評價策略來優化系統的通信參數,提高煤礦設備實時性和可靠性。
1 網絡控制系統實時性能建模分析
圖1為考慮時延的網絡控制系統典型結構。圖中ZOH(Zero-order hold)為零階采樣保持器,τsc為傳感器到控制器的時延,可通過設計合理的觀測器進行補償,最終獲得能用于控制計算的無時延的對象狀態近似值。τca為控制器到執行器的時延。本文為了簡化分析,將系統的計算延遲歸到τca考慮。
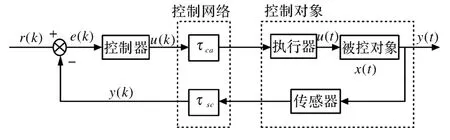
圖1 具有時延的網絡控制系統框圖Fig.1 Block diagram of network control system with time delay
一些特殊的網絡協議能夠保證網絡延遲為常數,如CAN 總線協議[5],但許多其它的網絡協議導致的網絡延遲是時變的,如DeviceNet、無線網絡和Ethernet[6]。將時變延遲常數化處理的一種解決方法是在接收端引入緩沖區。此方法可使系統分析簡化,不足之處是延遲按所有數據包傳輸延遲的最壞情形來考慮,導致分析與設計結果的保守性。考慮許多實際的網絡控制系統中,控制器和驅動器是放置在被控對象端,可以認為不存在數據丟包的影響。
假設系統中連續被控對象的狀態方程為
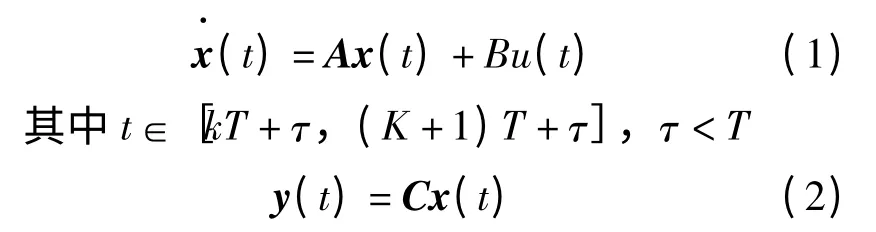
其離散線性控制率為

式中,x(t)為系統狀態;u(t)為控制輸入;y(t)為系統輸出;A、B、C為具有相應維數的矩陣。
2 時延對網絡控制系統性能的影響
針對控制回路總時延的幾種不同情況,岳東、彭晨等人給出了幾個保證系統漸進穩定的條件,保證系統的解在采樣點的值漸進收斂[7]。通過在執行器和控制器端通信模塊中引入緩沖區,將CSMA/CD 導致的隨機時間延遲變成了定常時延。因此,網絡控制系統的穩定性問題化為檢驗矩陣的Schur 穩定性問題[8]。
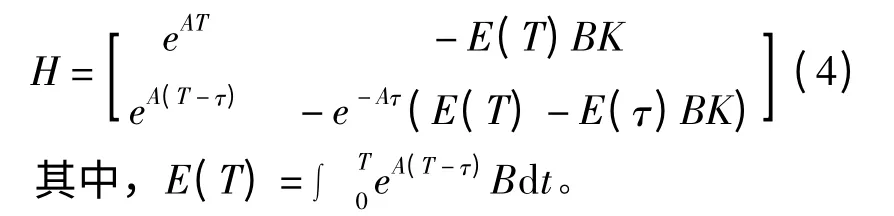
具有恒定時延的網絡控制系統,系統穩定性可歸結為檢驗矩陣(4)的Schur 穩定性問題。
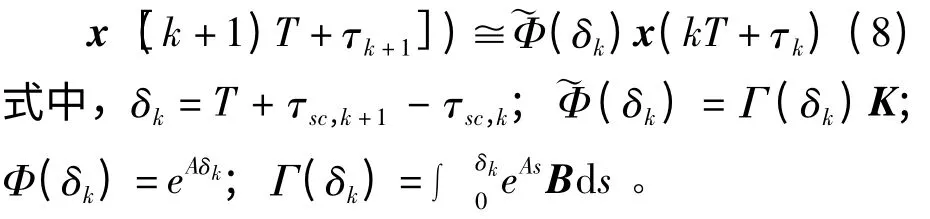
對象的被控狀態x(kT +τsc,k)的估計值由kT時刻的采樣輸出以及時延τsc決定。當系統全狀態反饋時,通過觀測器對時延τsc的補償獲得更準確的對象被控狀態值。本文假定系統對象的狀態方程如式(1)、式(2),并考慮到控制器模型,則其解析解可以表示為

圖2 是系統存在全狀態反饋時觀測器的時序示意圖。
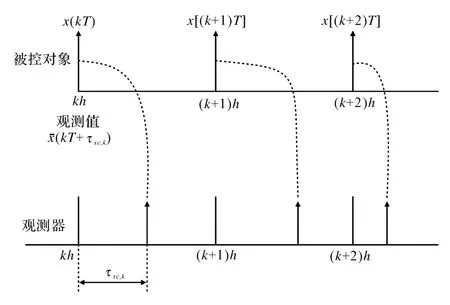
圖2 全狀態反饋下被控對象和觀測器時序Fig.2 Time sequence of controlled object and observer in full state feedback
圖中τsc,k表示對象被控狀態為x(kT)時傳感器到控制器之間的時延;ˉx(kT +τsc,k)是狀態x(kT)時實驗觀測值。假設在采樣過程中不存在測量噪聲,那么狀態x(kT)帶有時延的觀測值ˉx(kT+τsc,k)為

系統的反饋控制器為

根據此控制策略,該閉環控制系統可以表示為
以上分析可見,在傳感器采用時間驅動方式的網絡控制系統中,通過構建的觀測器進行時延τsc估值,可以獲得能用于系統分析的對象狀態近似值。
采用Jitterbug 工具箱,搭建分析網絡控制系統時延仿真平臺,對各種時延情況下的線性閉環控制系統靜態性能進行仿真分析。Jitterbug 有兩個重要的并行模塊所組成:信號模塊和時序模塊,如圖3 所示。
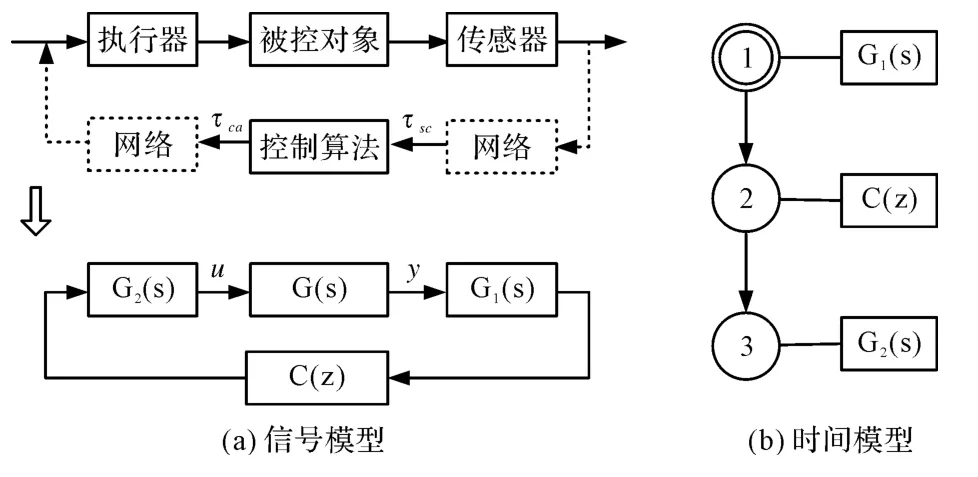
圖3 NCS 的Jitterbug 模型Fig.3 Jitterbug model of network control system
Jitterbug 采用一個二階性能評估標準,研究各種變化時序情形下的系統性能,即

控制系統總的代價函數可以通過所有的連續和離散系統的輸入輸出總合計算,即

以直流伺服系統為被控對象,傳遞函數G(s)=1000/s(s +1),傳感器和執行器為離散時間系統,G1(z)=G2(z)=1。被控對象通過網絡與一個PID 控制器相連,輸入為方波信號。在固定采樣時間周期內,傳感器對輸入信號進行采樣,并送往控制器計算,然后送入執行器進行處理。由公式:

利用Jitterbug 計算在固定時延時的性能指標函數值,并繪制出J 同采樣周期和時延的關系結果如圖4 所示。
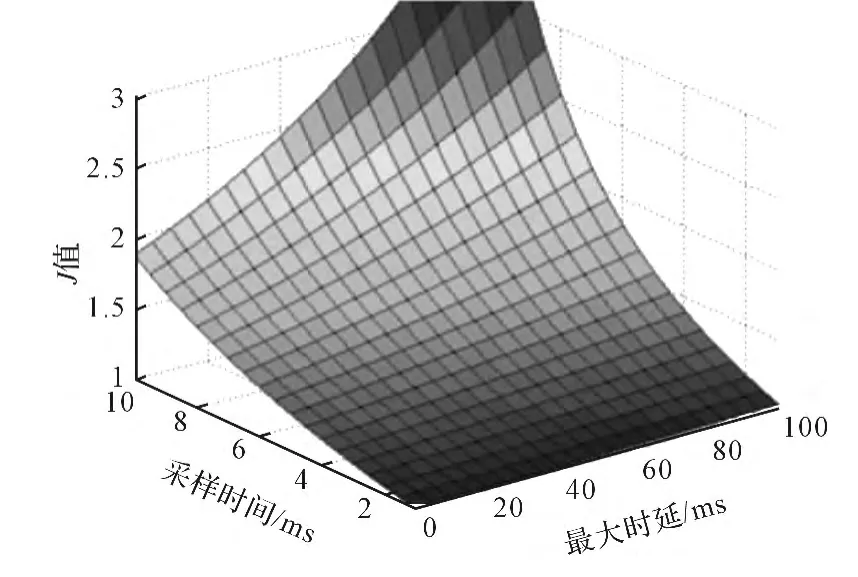
圖4 隨機時延情況下系統性能指標曲線Fig.4 System performance index curve in random time delay
控制系統采用PD 控制器(K=1.5,Td=0.035),并且為了使得NCS 產生的時延和抖動效應清晰可見,采樣間隔時間設置h=10 ms。圖中x 軸為NCS 的網絡時延,y 軸表示采樣周期,z 軸為系統的性能指標函數值J。由圖可知,隨著時延增加,J 也增大。采樣周期為8 ms,沒有時延時,J <2;但時延占采樣周期60% 時,性能指標函數值J 變為無窮大,導致系統不穩定。因此,采樣周期和時延變化影響控制系統的性能。
在基于以太網的控制系統中,CSMA/CD 協議使得網絡時延是隨機的,可以在接收端采用緩沖區的方式將隨機延遲進行常數化處理,但會導致系統的參數選取會趨于保守。利用Jitterbug 計算NCS 在固定時延情況下的性能指標函數值J,繪制出的結果如圖5 示。分析可見,系統不穩定的區域擴大,這主要是網絡延遲按數據包傳輸最壞情形考慮而導致。
利用Jitterbug 可分析對網絡延時的補償策略,讓控制器參數隨著網絡傳輸時延做動態的調整。參考經驗或者實驗確定時延值和控制參數存儲在表中。控制系統補償過程中控制器首先決定時延τsc,然后根據τsc值估計出系統的傳輸總時延,再利用總時延值查表得出對應的控制器參數,通過控制器計算輸出控制信號,實現系統的控制。對控制系統進行補償時采用補償參數如表1 所示。補償后的隨機時延的系統代價函數如圖6 所示,與圖4 相比可見,通過補償使系統性能得到改善。

圖5 固定時延情況下系統性能指標曲線Fig.5 System performance index curve in fixed time delay
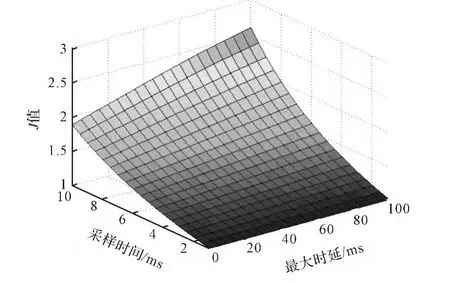
圖6 時延補償后的系統性能指標函數曲線Fig.6 System performance index curve after time delay compensation
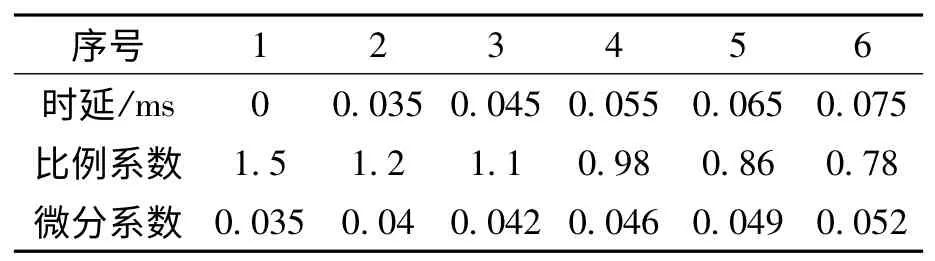
表1 補償參數表Tab.1 Compensation parameters table
3 分布式實時控制系統性能仿真分析
3.1 基于TrueTime 的網絡控制系統仿真模型
TrueTime 工具箱是瑞典Dan Henriksson 和Anton Cervin 等學者研發的網絡控制系統仿真工具箱,可以對網絡時延、網絡參數對系統性能的影響、控制方法、網絡調度等多方面進行綜合仿真研究。TrueTime 工具箱主要包括Kernel 和Network 兩個模塊。Kernel 核心是靈活的實時內核,系統預定義了多種調度策略,包括固定優先級(Fixed Priority,FP)、單調速率(Rata Monotonic,RM)、截止期單調(Deadline Monotonic,DM)、最小截止期優先(Earliest Deadline First,EDF)等。Network 模塊采用事件驅動方式,當有消息進出網絡時,網絡模塊執行工作。將TrueTime中的模塊與Simulink 中的常用模塊相連,就可以構建相應的實時控制系統或網絡控制系統。
搭建一個基于TrueTime 的NCS 仿真系統,以直流伺服系統為被控對象,系統用傳感器模塊、執行器模塊、擾動模塊和通信過程等四個模塊來建立分布式伺服控制系統的閉環仿真模型,如圖7 所示。
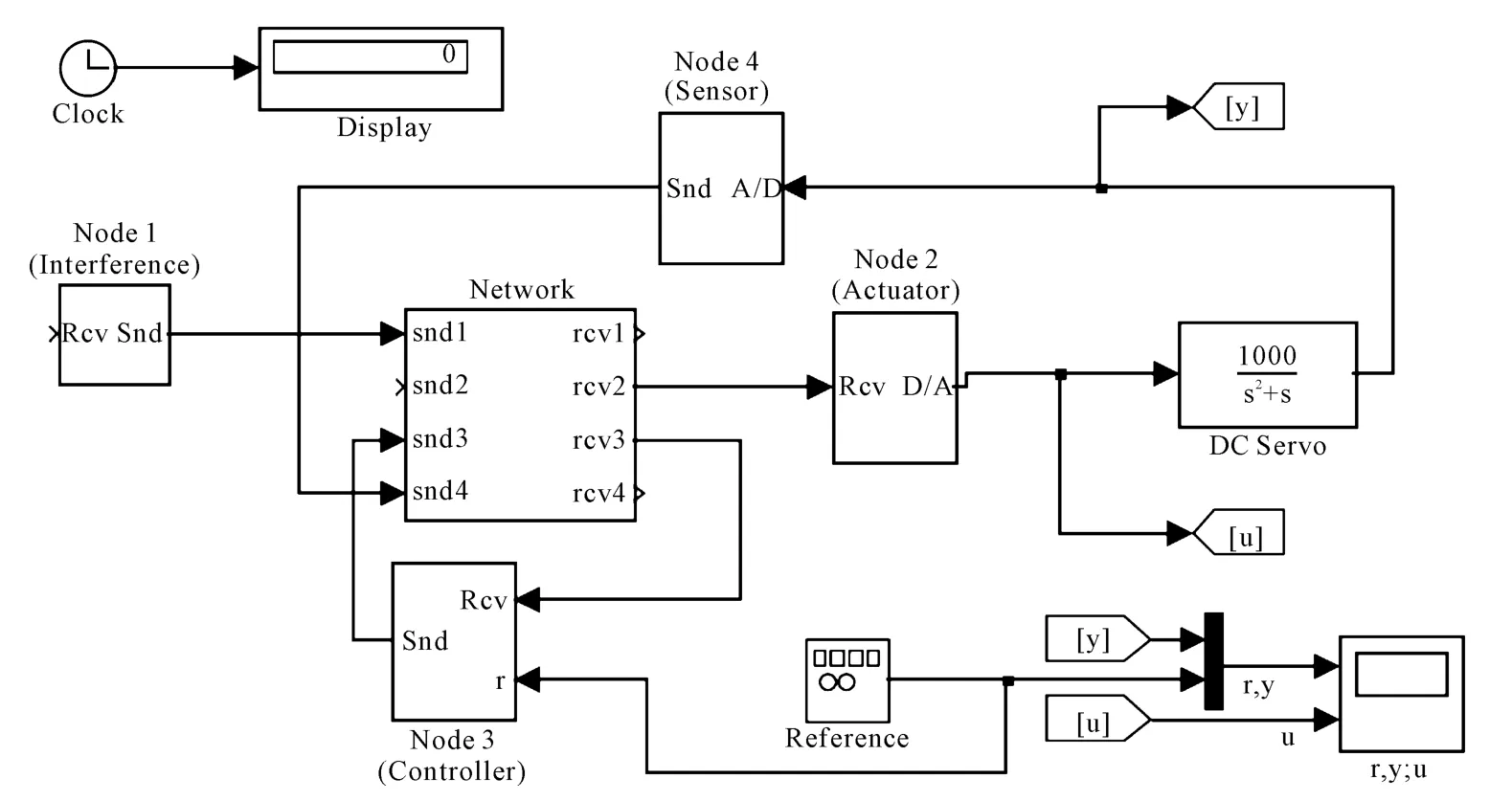
圖7 基于TrueTime 的網絡控制系統仿真模型Fig.7 Simulation model of network control system based on TrueTime
網絡直流電機伺服過程可以用連續時間傳遞函數描述:

采用如下的離散PID 控制器:
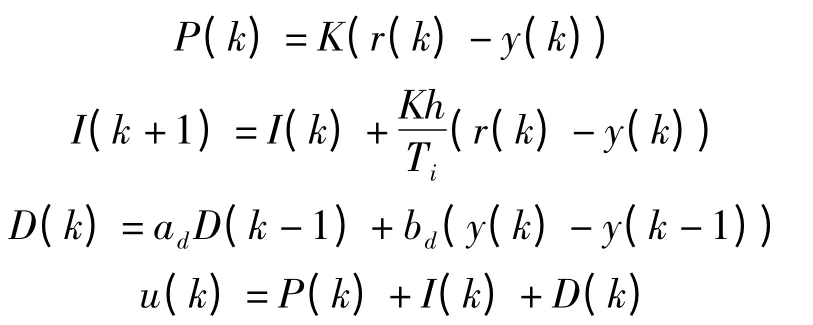
3.2 網絡通信干擾對控制性能的影響
初始化程序中設置傳感器為時間驅動,執行器和控制器均為事件驅動,控制器采用PID 控制。時間驅動的傳感器采集被控對象的數據并發送到網絡,控制器對采集的數據進行控制運算并將控制結果發送至網絡,通過網絡傳回被控對象的執行機構。仿真模型中的干擾節點,屬于高優先級任務,用于干擾網絡通信。
控制器采用PD 控制,初始設定參數為:采樣周期h=0.010 s;比例系數K=1.5;積分系數Td=0.035;采用RM 網絡調度。有無干擾通信情況下,系統控制性能和網絡調度曲線如圖8 所示。調度圖中峰值表示線程正在運行,中間值表示任務被搶占,最低值表示任務處于睡眠狀態。從仿真結果圖中,可以判定系統的可調度性,為系統性能判定提供了可靠的依據。
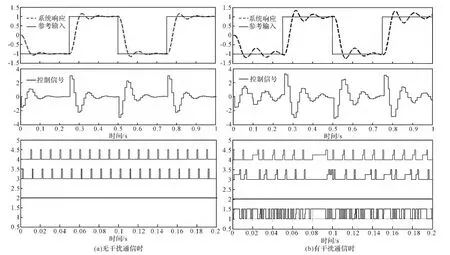
圖8 網絡通信干擾對控制性能的影響Fig.8 Control performance influence by interference of network communication
分析可見,在沒有干擾時對象輸出y 經過網絡傳輸后,能夠迅速跟蹤參考輸入r 的變化曲線,采用PD 控制方法可以進行快速、有效調節,系統的控制性能穩定。在控制器和通信過程中加入干擾信號,雖然系統的控制性能明顯降低,但所采用的控制策略仍可以進行有效調節,此時網絡調度仿真模塊對干擾節點進行調度處理。因此網絡調度策略決定了網絡與計算機的不同執行方式,影響網絡控制系統性能,需要根據系統任務特點合理設計。
3.3 網絡調度對控制性能的影響
利用TrueTime 搭建網絡調度控制3 臺直流電機的仿真模型。三個電機的控制任務采樣周期分別為0.006 s,0.005 s,0.004 s,保持仿真模型其它參數不變,分別采用RM 和EDF 調度策略,運行仿真結果和調度曲線如圖9、圖10 所示。
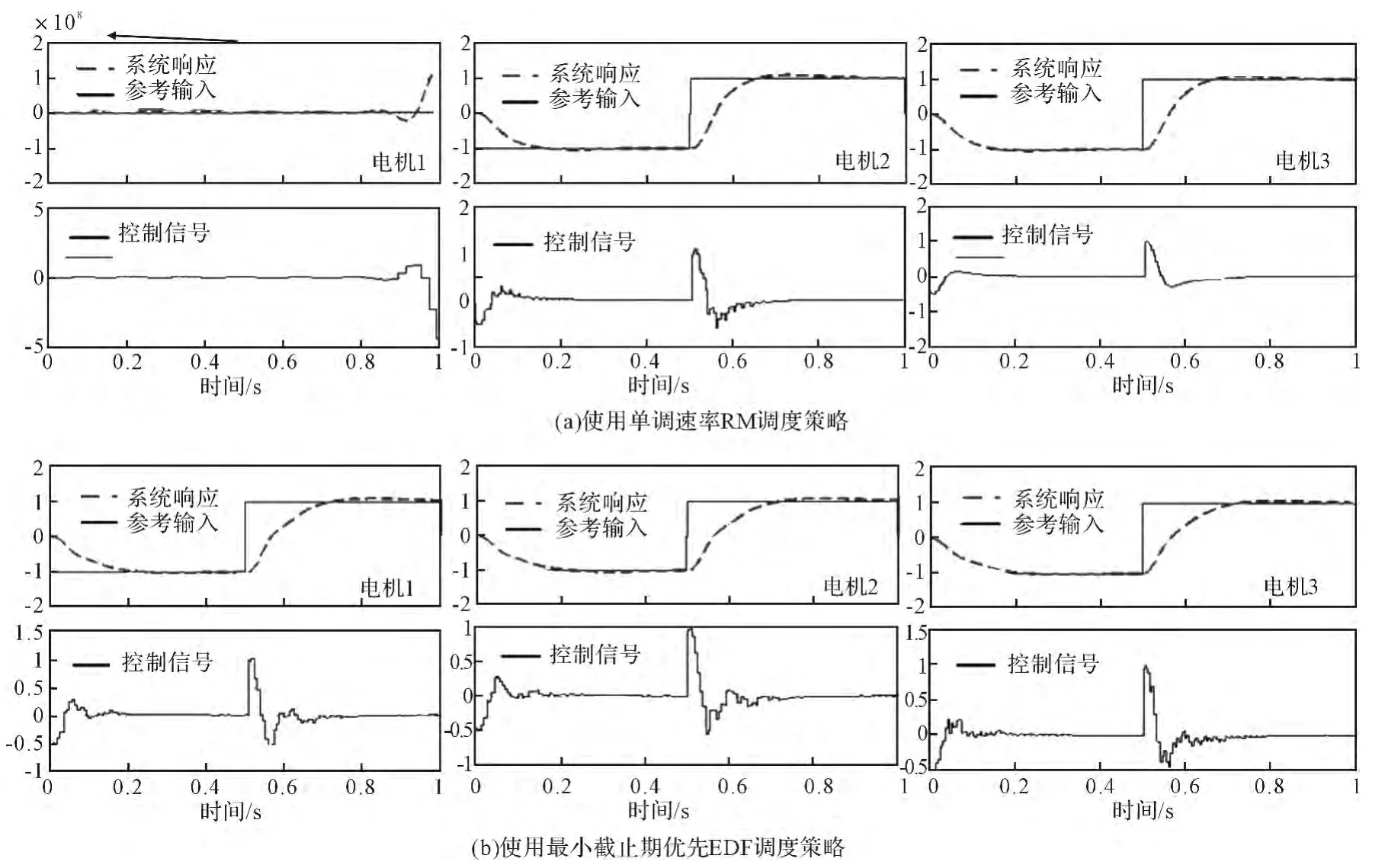
圖9 RM 和EDF 調度策略對電機運行性能的對比Fig.9 Comparison of the motor operating performance using the RM and EDF scheduling strategies
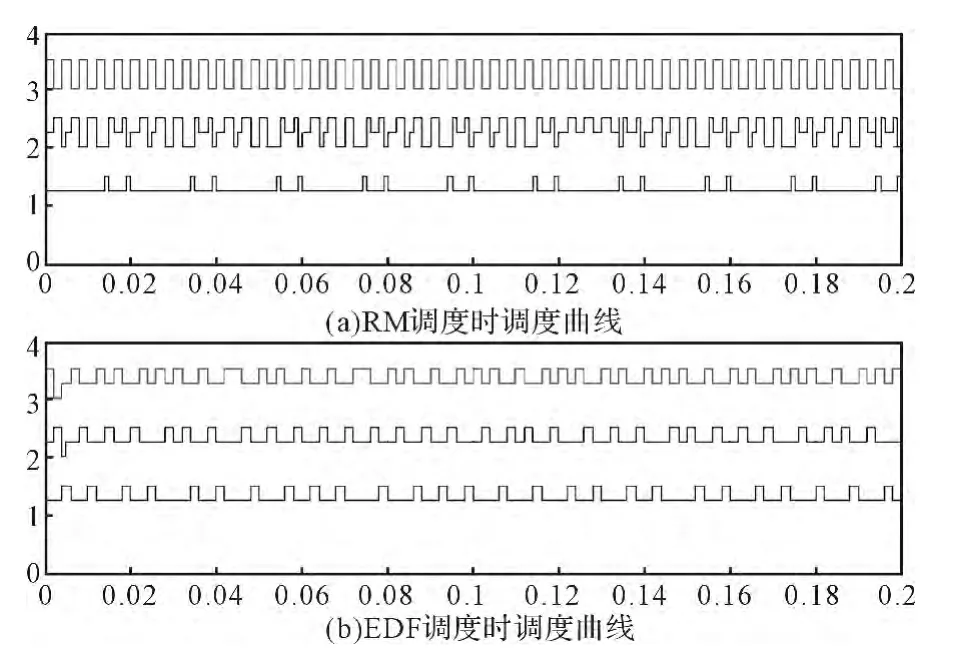
圖10 RM 和EDF 調度曲線對比Fig.10 Comparison between RM and EDF scheduling curves
由圖可見:采用RM 調度策略時,電機1 優先級低總被搶占,不能得到反饋信號,控制策略失效導致系統不穩定。采用EDF 策略后,根據任務距離時限要求的長度動態分配優先級,每個任務得到了合理的調度,三個電機控制性能穩定。
4 結論
論文研究了網絡控制系統中網絡時延、采樣速率和信息傳遞間隔等因素對系統穩定性的影響,結合煤礦設備運行實驗,使用仿真方法研究網絡控制系統的性能,對煤礦分布式控制系統最佳運行參數的確定提供了參考,并得出以下結論:
(1)網絡時延可以通過構建合理觀測器進行補償校正,但以傳感器時間驅動為前提、采樣速率和信息傳遞時間間隔會導致系統網絡資源占用問題,嚴重時會影響系統穩定性,必須進行優化以獲得良好的系統控制性能。
(2)在網絡控制系統開發中,利用綜合評價策略,分階段采用了靜態分析和動態測試方法,對確定系統最佳運行參數十分有效。
(3)網絡仿真為網絡通信性能提供了一個方便、高效的驗證和分析方法。網絡控制系統仿真平臺對網絡環境下控制對象、執行器、傳感器和控制器等進行研究,有助于系統最佳運行參數確定,保證網絡通信的實時性。
[1]孟惠霞.煤礦井下遠程監控系統網絡通信的研究[J].煤炭工程,2010,(07):99-101.
[2]杜大軍,費敏銳,宋楊,李雪.網絡控制系統的簡要回顧及展望[J].儀器儀表學報,2011,(03):713-721.
[3]陳在平,岳有軍.工業控制網絡與現場總線技術[M].北京:機械工業出版社,2006:
[4]吳小平.基于時延補償和廣義預測控制算法的網絡控制系統研究[D].武漢:武漢科技大學,2007.
[5]肖勇,張軍,閻家光.煤礦監控系統中CAN 總線網絡控制系統的設計與實現[J].礦業安全與環保,2008,(06):34-35 +42.
[6]傅磊,馬步強,史偉,梅瑾燁.基于PROFINET 工業以太網的連鑄自動化系統設計[J].重型機械,2012,(02):41-44.
[7]岳東,彭晨,Qinglong Han.網絡控制系統的分析與綜合[M].北京:科學出版社,2007
[8]Walsh G.C,Hong Ye,ushnell L.G.Stability analysis of networked control systems[J].IEEE Transactions on Control Systems Technology.2002,10(3):438-446.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32