電動汽車用異步電機轉子磁鏈定向校正算法研究
2015-04-10 09:13:04郭磊磊楊淑英
電工技術學報 2015年8期
郭磊磊 張 興 楊淑英 謝 震
電動汽車用異步電機轉子磁鏈定向校正算法研究
郭磊磊 張 興 楊淑英 謝 震
(合肥工業大學電氣與自動化工程學院 合肥 230009)
異步電機參數受溫度、勵磁等的影響,導致基于轉子磁鏈定向的矢量控制系統定向出現偏差。基于無功功率的算法雖然可以實現定向校正,但其校正準確度受死區的影響。為此,提出了一種改進的算法,即采用定子電流與定子磁鏈的點乘閉環來校正磁鏈定向,可以不受死區影響,提高了定向校正準確度。然而,該算法的穩態準確度受定子電感的影響,因此,設計了簡單的補償算法。理論分析和實驗結果驗證了該算法的有效性。
定子電流 定子磁鏈 點乘 死區 異步電機 電動汽車
1 引言
隨著能源危機的加劇,電動汽車逐漸成為未來汽車的發展趨勢。異步電機因價格低廉、維護簡單而在電動汽車驅動系統中占據重要地位[1-2]。常用的異步電機矢量控制方法是直接轉子磁鏈定向控制和間接轉子磁鏈定向控制。兩種定向方法都受電機參數的影響。為了有效解決參數對電機矢量控制定向準確度的影響問題,文獻[3]設計了實用的異步電機轉子磁鏈定向校正算法,但該算法受電機定子電阻和死區的影響。文獻[4]設計了基于轉子磁鏈q軸分量的異步電機間接矢量控制轉差頻率校正算法,然而該算法會導致系統運行過程中易產生振蕩甚至不能正常起動,且該算法只適用于間接磁場定向控制。文獻[5]提出了基于無功功率的磁場定向校正算法。該算法克服了定子電阻的影響。然而,在計算無功功率時,采用參考電壓代替實際電壓,受死區的影響。為此,文獻[6]提出了基于無功功率的模型參考自適應轉子時間常數辨識方法,通過辨識轉子時間常數,實現間接磁場定向控制。為了提高準確度,加入了死區補償算法。然而,在低速輕載的場合,經常會發生零電流鉗位現象[14],電流方向判斷困難,造成死區補償偏差,并且該算法只適用于間接磁鏈定向控制。
為了簡化異步電機矢量控制定向校正算法,提高校正準確度,本文提出了一種改進的磁鏈定向校正算法。該算法基于定子電流與定子磁鏈的點乘模型。既可用于直接轉子磁鏈定向,也可用于間接轉子磁鏈定向,不受定子電阻的影響,且可直接采用參考電壓代替實際電壓,不受死區影響。理論分析和實驗結果都驗證了該算法的有效性。
2 校正原理分析
基于無功功率的磁鏈定向校正算法[5]采用穩態無功功率作為參考模型,瞬態無功功率作為調制模型,依據模型參考自適應原理構建了異步電機磁鏈定向校正算法,但是該算法受死區影響,動態響應較差。為此,提出了一種改進的算法。
常用的異步電機控制方法是基于轉子磁鏈定向的矢量控制算法,系統整體控制原理如圖1虛線框外部分所示。轉子位置角度計算部分通過計算轉差頻率和實測轉速得到同步角頻率,同步角頻率進行積分得到矢量控制的定向角度,這是矢量控制的核心。依據定向角度并通過坐標變換,在同步旋轉dq坐標系上實現矢量控制。在異步電機轉子磁鏈定向矢量控制系統中,通常定義轉子磁鏈位于d軸,q軸超前d軸90°。

圖1 系統整體控制框圖Fig.1 The overall control block diagram of the system
采用轉子磁鏈定向控制,在定向準確時,轉子磁鏈滿足[9]


式中,ψsd、ψsq分別為d、q軸定子磁鏈。
定子電流與定子磁鏈的點乘為
由于電機參數的變化,電機定向角度常常偏于真實的轉子磁鏈角度。在 isq>0時,定向不準主要分為定向超前和定向滯后兩種情況。
當定向超前時,如圖 2a所示。dq為定向準確時的轉子坐標系,為定向超前時的轉子坐標系。此時,估計的轉子磁鏈位置超前于實際的轉子磁鏈位置,這導致真實的 d軸勵磁電流偏小,真實的 q軸轉矩電流增大,定子電流幅值不變。由式(3)可知,此時定子磁鏈與定子電流的點乘偏小。定向滯后如圖2b 所示。此時,估計的轉子磁鏈位置滯后于實際的轉子磁鏈位置,這導致真實的d 軸勵磁電流偏大,真實的q 軸轉矩電流偏小,定子電流幅值不變。由式(3)可知,此時定子磁鏈與定子電流的點乘偏大。

圖2 定向超前與滯后矢量圖Fig.2 Vector diagram of orientation ahead and lag
綜上分析,當定向超前時,真實的定子電流與定子磁鏈點乘偏小,當定向滯后時,真實的定子電流與定子磁鏈點乘偏大。
當定向準確時,定子電流與定子磁鏈點乘為


式中,ψsα、ψsβ為靜止αβ坐標系上的定子磁鏈。
定子磁鏈滿足
因此,可以以式(4)作為參考模型,式(5)作為調整模型,構成閉環系統實現定向校正。由式(4)可知,參考模型不受定向準確度的影響,其動態響應更好。
3 調整模型的計算
調整模型計算需要定子磁鏈信息。常用的磁鏈計算模型主要有電壓模型和電流模型。電流模型受電機參數影響嚴重。為了盡量減小參數的影響,本文選擇采用電壓模型計算定子磁鏈,如式(6)所示。為避免使用電壓傳感器,本算法采用電壓參考值代替實際電壓值,即采用電流環 PI調節器的輸出值作為電壓參考值usα、usβ進行磁鏈計算,如圖 1所示。式中,Rs為定子電阻。

然而,式(6)含有定子電阻,需要分析其對調整模型的影響。
將式(6)代入式(5)可得


所以該算法調整模型不受定子電阻的影響。為了解決積分問題,本文采用文獻[7]設計的采用低通濾波器代替積分并進行補償的算法。此外,調整模型的計算需要定子電壓,在實際系統中,通常采用參考電壓代替實際電壓,但這會受到死區的影響[5]。為此,需要分析死區對本算法調整模型計算的影響。
假設控制的開關周期為 Ts,死區時間為 t,直流側電壓為 Udc,不考慮開關過程及管壓降時,真實的電壓和參考電壓的關系可表示為[10]
考慮abc到αβ的坐標變換,易得


其中

可見,該算法調整模型采用參考電壓計算,結果與采用實際電壓相同,即該算法調整模型不受死區影響。因此,該算法可提高定向校正準確度。
4 定向校正系統分析
4.1 動態響應分析
圖3給出了定向超前時的定子電流矢量圖。

圖3 定子電流矢量圖Fig.3 Stator current vector diagram
由圖3可得

根據三角函數和差化積公式得



在dq坐標系下分析誤差的動態響應。定義誤差為




3.2 穩態準確度分析
如式(7)所示,調整模型不受電機參數的影響。由以上分析可知,調整模型計算不受死區的影響。因此,可認為該算法調整模型對校正系統的穩態準確度沒有影響。
由式(4)易知,參考模型含有電感參數。當參
由式(11)可知,在數發生變化時,導致實際參考模型發生變化,而控制系統中如果采用固定的參數,將會導致調整模型收斂于一個錯誤的值,給定向帶來偏差。假設定子電感額定值為Ls,由于運行條件的變化導致其實際值增大為 Ls+ΔLs,漏感σLs很小,可認為不變化。由于實際調整模型要根據式(7)計算,不依賴于定子電感。當閉環系統穩定時,調整模型收斂于錯誤的參考模型,ε=0。這時,因參考模型參數發生變化導致的誤差εL為

綜合以上動態與穩態分析,得到如圖 4a所示的閉環校正系統框圖。

圖4 閉環校正系統及具體實施框圖Fig.4 Closed-loop correction system and specific implementation diagram
在恒磁通控制時,勵磁電感不變,εL=0。當ε>0時,控制使Δθ<0,經過PI調節器減小ε;當ε<0時,控制使Δθ>0,經過PI調節器增大ε,最終使ε收斂于零。然而,在電動汽車驅動場合,常常采用變磁鏈控制,導致勵磁電感變化[12],。當εL>0時,參考模型偏大,穩態時應當使ε=εL>0,才能保證定向得到正確校正,反之控制使ε=εL<0。因此,如果要精確控制,必須已知εL。為了得到勵磁電感參數,文獻[8]、文獻[12-13]研究了勵磁電感在線辨識算法,然而在線辨識算法的引入,增加了系統的運算量,提高了系統對控制器的要求。當忽略εL時,必然給控制系統帶來誤差。為了校正定子電感對參考模型的影響,簡化算法,實現準確定向,本文采用離線參數辨識[11]方法辨識得到勵磁電感和漏感,通過擬合曲線方法得到勵磁電感與勵磁電流的關系。同時,考慮漏感不變,可得到。
由以上分析可得定向校正環節的具體實施框圖見圖4b。
綜上,本算法的整體控制框圖見圖 1。圖中虛線框內部分為本文提出的定向校正環節。定向出現偏差時,定向校正環節自動實現矢量控制系統的定向校正。
5 實驗結果
實驗中采用15kW 籠型異步電機,其額定電壓為180V,額定電流為80A,額定頻率為120Hz,極對數為 2。采用 DSP28335構成控制器。開關頻率為2kHz,死區時間為6μs。采用間接矢量控制算法。離線辨識得到轉子時間常數為 0.186。圖 5給出了不同轉子時間常數下空載運行時的實測 V-F曲線,給定額定勵磁電流為35A。

圖5 空載實測V-F曲線Fig.5 V-F curve of no-load
為了驗證空載時電機電壓為定向準確時的電機電壓,人為選擇兩個錯誤的轉子時間常數進行空載試驗,并與采用準確時間常數的實驗結果進行對比(見圖5)。可見,對于不同的轉子時間常數,其輸出電壓基本相等。這是由于空載條件下轉矩電流很小,轉差頻率很小造成的。說明空載時電機端電壓可代表定向準確時的電機端電壓。加載時,如果定向準確,則電機電壓應保持空載時的電壓值基本不變。
圖6給出了負載電流為21.9A時的加閉環和不加閉環時的實測V-F曲線。可見,不加閉環時,定向偏差嚴重。這主要是因為電機轉子時間常數不僅受溫度、勵磁飽和的影響,還受頻率等其他非線性特性的影響。加閉環后,電機輸出電壓等于空載時的電機電壓,定向得到校正。

圖6 有閉環和無閉環V-F曲線對比Fig.6 Comparison of V-F curve with and without closed-loop
基于無功功率的算法受死區的影響,因而定向校正準確度受到限制。圖7比較了本算法和基于無功功率算法的磁鏈定向校正效果。圖 7a對應轉矩電流為28.4A,圖7b對應轉矩電流為59A。可見由于基于無功功率的算法受死區的影響,導致參考模型大于真實值,造成定向超前,勵磁電流偏小,電機電壓偏小。本算法則較好地實現了定向校正。

圖7 新閉環和無功功率閉環V-F曲線對比Fig.7 Comparison of V-F curve based on the new closedloop system and the reactive power closed-loop system
圖 8a給出了轉子時間常數為 0.186時,不同頻率下隨負載增加電機端電壓的變化曲線。從下到上,頻率從15Hz以5Hz間隔增加到80Hz。可見,隨著負載的增加,電機端電壓降低,說明定向不準。圖8b給出了加入校正環后的對應曲線。可見加入校正環后,系統的定向準確度大大提高。

圖8 不加閉環和加閉環時的電壓曲線Fig.8 Voltage curve without and with closed-loop system
弱磁運行時,因為勵磁電感會受到影響,從而影響該定向校正算法,而開環弱磁也會影響勵磁電感,又考慮到實驗平臺的限制,本文采用開環弱磁的方法驗證該算法的有效性。
圖9a給出了勵磁電流為24A時的 V-F曲線,轉矩電流為 21.9A。理想 V-F曲線是根據同一轉速時,勵磁電流與電機電壓成正比來近似得到。圖9b給出了勵磁電流為 12A時的 V-F曲線。可見,不加校正時,定向出現偏差,加入校正后,偏差得到校正。校正后的V-F曲線與理想 V-F曲線存在差別,主要是因為電機定子電阻的壓降及非線性特性引起的。

圖9 弱磁時的V-F曲線Fig.9 V-F curve with flux-weakening
為了驗證該算法的動態響應性能,圖 10給出了勵磁電流由 35A突減為 24A時的動態響應波形。由于勵磁電流突減,參考模型突減,調整模型可以實現穩定地跟蹤,系統具有良好的動態響應性能。

圖10 系統動態響應波形Fig.10 Dynamic response waveforms of the system
6 結論
本文設計了一種改進的轉子磁鏈定向校正算法,解釋了其校正原理,研究了死區對該算法的影響,設計了閉環校正系統,實驗結果表明,本算法不受死區影響,可進一步提高定向校正準確度。
附錄
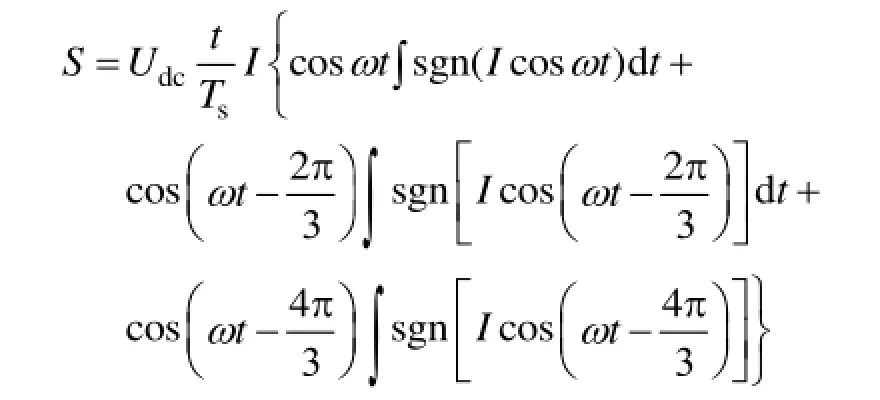
考慮到sgn(Icosωt)=sgn(cosωt),而cosωt是周期為2π的周期偶函數,則sgn(cosωt)是周期方波偶函數。sgn(cosωt)傅里葉展開后得到

則

定義

采用積化和差方程

得到

分別分析 k=0,3n,3n-1,3n-2(n=1,2,…),并考慮到

最后可得 p在周期(0,2π/ω)內平均值為 0,所以 S在周期(0,2π/ω)內平均值為0。
[1] 張細政, 王耀南, 楊民生. 電動車用感應電機電阻的狀態滑模觀測新方法[J]. 中國電機工程學報, 2009, 29(15): 101-106.
Zhang Xizheng, Wang Yaonan, Yang Minsheng. State sliding-mode observer based resistance estimation of induction motors for electric vehicle[J]. Proceedings of the CSEE, 2009, 29(15): 101-106.
[2] 陳勇, 張大明, 姜丕杰. 電動汽車用異步電機矢量控制系統仿真分析[J]. 系統仿真學報, 2007, 19(16): 3761-3765.
Chen Yong, Zhang Daming, Jiang Pijie. Simulation analysis of vector control system for asynchronous motor in electric vehicles[J]. Journal of System Simulation, 2007, 19(16): 3761-3765.
[3] 孫大南, 劉志剛, 刁利軍, 等. 牽引電機矢量控制轉子磁場準確定向實時校正策略[J]. 電工技術學報, 2011, 26(9): 116-123.
Sun Danan, Liu Zhigang, Diao Lijun, et al. Accurate rotor flux orientation real-time correction strategy for vector control of traction motors[J]. Transactions of China Electro Technical Society, 2011, 26(9): 116-123.
[4] 樊揚, 瞿文龍, 陸海峰, 等. 基于轉子磁鏈q軸分量的異步電機間接矢量控制轉差頻率校正[J]. 中國電機工程學報, 2009, 29(9): 62-66.
Fan Yang, Qu Wenlong, Lu Haifeng, et al. Slip frequency correction method base on rotor flux qAxis component for induction machine indirect vector control system[J]. Proceedings of the CSEE, 2009, 29(9): 62-66.
[5] 陸海峰, 瞿文龍, 張磊, 等. 一種基于無功功率的異步電機矢量控制轉子磁場準確定向方法[J]. 中國電機工程學報, 2005, 25(16): 116-120.
Lu Haifeng, Qu Wenlong, Zhang Lei, et al. A novel rotor flux oriented scheme of induction motor based on reactive power[J]. Proceedings of the CSEE, 2005, 25(16): 116-120.
[6] 王高林, 楊榮峰, 張家皖, 等. 一種感應電機轉子時間常數MRAS的在線辨識方法[J]. 電工技術學報, 2012, 27(4): 49-53.
Wang Gaolin, Yang Rongfeng, Zhang Jiawan, et al. Rotor time constant on-line estimation of inductionmotors based on MRAS[J]. Transactions of China Electro Technical Society, 2012, 27(4): 49-53.
[7] Mihai Comanescu, Longya Xu. An improved flux observer based on PLL frequency estimator for sensorless vector control of induction motors[J]. IEEE Trans. on Industrial Electronics, 2006, 53(1): 50-56.
[8] Emil Levi, Matija Sokola, Slobodan N Vukosavic. A method for magnetizing curve identification in rotor flux oriented induction machines[J]. IEEE Trans. on Energy Conversion, 2000, 15(2): 157-162.
[9] 陳伯時. 電力拖動自動控制系統[M]. 3版. 北京:機械工業出版社, 2008.
[10] 王高林, 于泳, 楊榮峰, 等. 感應電機空間矢量PWM 控制逆變器死區效應補償[J]. 中國電機工程學報, 2008, 28(15): 79-83.
Wang Gaolin, Yu Yong, Yang Rongfeng, et al. Deadtime compensation of space vector PWM inverter for induction motor[J]. Proceedings of the CSEE, 2008, 28(15): 79-83.
[11] 劉洋, 趙金, 王慶義. 間接矢量控制系統中的異步電動機參數辨識[J]. 電工技術學報, 2008, 23(7): 22-26.
Liu Yang, Zhao Jin, Wang Qingyi. An off-line parameter identification method for indirect vector controlled induction motor drive[J]. Transactions of China Electro Technical Society, 2008, 23(7): 22-26.
[12] Dae Hee Choi, Soon Bong Cho, Dong Seok Hyun. Improved torque response by tuning of the magnetizing inductance under field weakening operation region [C]. Industry Applications Conference, New Orleans, Louisiana, 1997.
[13] Mohamed S Zaky, Mahmoud M Khater, Shokry S Shokralla. Wide-speed-range estimation with online parameter identification schemes of sensorless induction motor drives[J]. IEEE Trans. on Industrial Electronics, 2009, 56(5): 1699-1707.
[14] 胡慶波, 呂征宇. 一種新穎的基于空間矢量 PWM的死區補償方法[J]. 中國電機工程學報, 2005, 25(3): 13-17.
Hu Qingbo, Lü Zhengyu. A novel method for deadtime compensation based on SVPWM[J]. Proceedings of the CSEE, 2005, 25(3): 13-17.
Research on Induction Motor Rotor Flux Orientation Correction Algorithm for Electric Vehicles
Guo Leilei Zhang Xing Yang Shuying Xie Zhen
(Hefei University of Technology Hefei 230009 China)
The parameters of induction motor are affected by temperature, field current and so on, which result in oriented deviation in the rotor flux oriented vector control. Although the algorithm based on reactive power can realize orientation correction, the correction accuracy is affected by the dead zone. Therefore, a modified method is proposed, which based on a closed-loop controller in terms of the dot product of stator current and stator flux. This method is independent of the dead zone and so the orientation correction accuracy is improved. However, the steady-state accuracy is affected by the stator inductance. Hence, a simple compensation algorithm is designed. The theoretical analysis and experimental results verify the effectiveness of the proposed algorithm.
Stator current, stator flux, dot product, dead zone, induction motor, electric vehicle
TM343
郭磊磊 男,1987年生,博士研究生,主要研究方向為大功率風力發電系統驅動技術等。
國家“十二五”科技支撐計劃項目(2012BAA01B04)。
2013-01-21 改稿日期 2013-03-14
張 興 男,1963年生,教授,博士生導師,主要研究方向為電力電子與電力傳動和新能源技術等。
