電力系統(tǒng)擴(kuò)展黑啟動(dòng)方案的后效性研究
2015-04-10 09:13:52顧雪平王大江李少巖李文云
電工技術(shù)學(xué)報(bào) 2015年8期
關(guān)鍵詞:優(yōu)化
顧雪平 王大江 李少巖 李文云 朱 濤 趙 川
電力系統(tǒng)擴(kuò)展黑啟動(dòng)方案的后效性研究
顧雪平1王大江1李少巖1李文云2朱 濤2趙 川2
(1. 華北電力大學(xué)新能源電力系統(tǒng)國(guó)家重點(diǎn)實(shí)驗(yàn)室 保定 071003 2. 云南電力調(diào)度控制中心 昆明 650011)
大停電后恢復(fù)初期階段的擴(kuò)展黑啟動(dòng)策略為恢復(fù)控制提供了新的思路,針對(duì)擴(kuò)展黑啟動(dòng)方案的后效性研究,將后續(xù)網(wǎng)架重構(gòu)過(guò)程離散為次序進(jìn)行的多個(gè)時(shí)步,建立了計(jì)及后續(xù)重構(gòu)過(guò)程中機(jī)組啟動(dòng)與負(fù)荷恢復(fù)交替與協(xié)調(diào)的多目標(biāo)網(wǎng)架重構(gòu)優(yōu)化模型。結(jié)合采用分層序列法、改進(jìn)細(xì)菌覓食算法和最短路徑法,從網(wǎng)架重構(gòu)整體最優(yōu)的角度求解每一時(shí)步的待恢復(fù)機(jī)組、負(fù)荷及相應(yīng)的恢復(fù)路徑,進(jìn)而得到網(wǎng)架重構(gòu)最優(yōu)方案;在此基礎(chǔ)上,建立了反映重構(gòu)過(guò)程多輸入多輸出要素的指標(biāo)集,以超效率數(shù)據(jù)包絡(luò)分析模型評(píng)估后續(xù)網(wǎng)架重構(gòu)的相對(duì)效率,以此效率表征擴(kuò)展黑啟動(dòng)方案的后效性。基于新英格蘭10機(jī) 39節(jié)點(diǎn)系統(tǒng)的擴(kuò)展黑啟動(dòng)方案算例分析驗(yàn)證了本文方法的有效性與正確性。
擴(kuò)展黑啟動(dòng) 后效性 數(shù)據(jù)包絡(luò)分析 網(wǎng)架重構(gòu) 多目標(biāo)優(yōu)化
1 引言
電力系統(tǒng)恢復(fù)控制研究對(duì)優(yōu)化大停電后的系統(tǒng)恢復(fù)措施、減小停電帶來(lái)的經(jīng)濟(jì)和社會(huì)損失具有重要意義。近年來(lái),智能電網(wǎng)的建設(shè)對(duì)提高電網(wǎng)供電可靠性發(fā)揮了重要作用[1],但是隨著大規(guī)模新能源發(fā)電系統(tǒng)的接入,電網(wǎng)的動(dòng)態(tài)特性更加復(fù)雜,在各種外部因素的影響下,大停電事故仍然是當(dāng)前電網(wǎng)運(yùn)行面臨的嚴(yán)重威脅[2],近期發(fā)生的多起大停電事故及恢復(fù)過(guò)程再次表明研究大停電事故及其恢復(fù)控制措施的重要性[3-4]。
大停電后的系統(tǒng)恢復(fù)是一個(gè)復(fù)雜的連續(xù)動(dòng)態(tài)過(guò)程,通常可分為黑啟動(dòng)、網(wǎng)架重構(gòu)和負(fù)荷恢復(fù)三個(gè)階段。黑啟動(dòng)階段是恢復(fù)的初始階段,是后續(xù)恢復(fù)的基礎(chǔ)。文獻(xiàn)[5-7]給出了黑啟動(dòng)方案制定的系統(tǒng)框架;文獻(xiàn)[8-10]對(duì)黑啟動(dòng)階段的相關(guān)技術(shù)問(wèn)題進(jìn)行了仿真分析;文獻(xiàn)[11-14]研究了黑啟動(dòng)方案評(píng)估優(yōu)選問(wèn)題;文獻(xiàn)[15]提出了以黑啟動(dòng)電源同時(shí)啟動(dòng)多個(gè)被啟動(dòng)機(jī)組的擴(kuò)展黑啟動(dòng)策略。網(wǎng)架重構(gòu)是在黑啟動(dòng)階段建立的局部網(wǎng)絡(luò)基礎(chǔ)上盡快恢復(fù)失電廠站并建立穩(wěn)定的目標(biāo)網(wǎng)架,在恢復(fù)中起著承上啟下的作用,是系統(tǒng)恢復(fù)研究的關(guān)鍵問(wèn)題,文獻(xiàn)[16-17]從復(fù)雜網(wǎng)絡(luò)理論角度優(yōu)化目標(biāo)網(wǎng)架;文獻(xiàn)[18-20]側(cè)重從送電路徑尋優(yōu)的角度優(yōu)化網(wǎng)絡(luò)重構(gòu);文獻(xiàn)[21]研究系統(tǒng)從樹(shù)狀網(wǎng)絡(luò)恢復(fù)到環(huán)狀網(wǎng)絡(luò)時(shí)的優(yōu)化算法;文獻(xiàn)[22]建立了分布式恢復(fù)的主從遞階決策模型;文獻(xiàn)[23-25]分別提出了不同的多目標(biāo)網(wǎng)架重構(gòu)模型方法。上述研究成果從不同角度為網(wǎng)架重構(gòu)做出重要貢獻(xiàn),但是現(xiàn)有的多數(shù)研究工作都將黑啟動(dòng)階段和網(wǎng)架重構(gòu)階段分開(kāi)進(jìn)行相對(duì)獨(dú)立的研究,而恢復(fù)過(guò)程是一個(gè)連續(xù)的動(dòng)態(tài)過(guò)程,各個(gè)階段緊密聯(lián)系,作為后續(xù)網(wǎng)架重構(gòu)基礎(chǔ)和前提的黑啟動(dòng)階段,其恢復(fù)效果直接影響后續(xù)的重構(gòu)過(guò)程。
擴(kuò)展黑啟動(dòng)策略同時(shí)啟動(dòng)多臺(tái)機(jī)組形成局部小網(wǎng)絡(luò),完成了部分網(wǎng)架重構(gòu)過(guò)程,不僅拓展了黑啟動(dòng)階段的恢復(fù)范圍,更有利于加快后續(xù)網(wǎng)架重構(gòu)進(jìn)程。不同的擴(kuò)展黑啟動(dòng)方案恢復(fù)形成的小網(wǎng)絡(luò)包含的機(jī)組數(shù)目及特性不同,已恢復(fù)節(jié)點(diǎn)和線路的拓?fù)湮恢貌煌耆嗤瑢?duì)系統(tǒng)后續(xù)恢復(fù)的效果產(chǎn)生不同的影響。因此有必要研究擴(kuò)展黑啟動(dòng)方案的后效性,綜合效果優(yōu)的方案不僅黑啟動(dòng)階段恢復(fù)效果好,還應(yīng)有利于后續(xù)的網(wǎng)架重構(gòu),可為黑啟動(dòng)階段恢復(fù)方案的綜合決策提供重要依據(jù)。
本文研究擴(kuò)展黑啟動(dòng)方案的后效性評(píng)價(jià),首先將重構(gòu)過(guò)程離散為多個(gè)順序執(zhí)行的時(shí)步,建立了兼顧機(jī)組恢復(fù)和負(fù)荷恢復(fù)的多目標(biāo)網(wǎng)架重構(gòu)模型,采用總體協(xié)調(diào)的分時(shí)步重構(gòu)策略與分層序列法得到每一時(shí)步的最優(yōu)恢復(fù)機(jī)組、負(fù)荷及相應(yīng)的恢復(fù)路徑。在此基礎(chǔ)上構(gòu)建了能夠全面系統(tǒng)反映網(wǎng)架重構(gòu)多輸入多輸出要素的指標(biāo)集,以超效率數(shù)據(jù)包絡(luò)分析模型評(píng)估得到的網(wǎng)架重構(gòu)相對(duì)效率來(lái)代表擴(kuò)展黑啟動(dòng)方案的后效性。
2 后續(xù)網(wǎng)架重構(gòu)多目標(biāo)優(yōu)化模型
2.1 分時(shí)步?jīng)Q策與總體協(xié)調(diào)的網(wǎng)架重構(gòu)思路
文獻(xiàn)[24]提出了一種分時(shí)步?jīng)Q策和總體協(xié)調(diào)的網(wǎng)架重構(gòu)思路,本文基于該思路建立擴(kuò)展黑啟動(dòng)后續(xù)網(wǎng)架重構(gòu)的優(yōu)化模型。在擴(kuò)展黑啟動(dòng)策略后續(xù)網(wǎng)架重構(gòu)階段,已啟動(dòng)的多臺(tái)機(jī)組能夠提供較大的功率,具備同時(shí)恢復(fù)機(jī)組及部分重要負(fù)荷的能力,機(jī)組的啟動(dòng)可以加快重構(gòu)過(guò)程和負(fù)荷恢復(fù),適量的負(fù)荷投入也有助于保持已恢復(fù)系統(tǒng)的穩(wěn)定,因此網(wǎng)架重構(gòu)過(guò)程是機(jī)組恢復(fù)和負(fù)荷恢復(fù)相互影響的交替協(xié)調(diào)恢復(fù)過(guò)程,重構(gòu)目標(biāo)是構(gòu)建由機(jī)組、樞紐節(jié)點(diǎn)和重要負(fù)荷組成的骨架網(wǎng)絡(luò)。重構(gòu)過(guò)程的決策是一個(gè)復(fù)雜的組合優(yōu)化問(wèn)題,若將連續(xù)時(shí)間過(guò)程轉(zhuǎn)化為多個(gè)次序執(zhí)行的離散時(shí)步,可大大降低建模復(fù)雜度。離散后的重構(gòu)過(guò)程可用圖1來(lái)說(shuō)明,其中S0為網(wǎng)架重構(gòu)的初始狀態(tài),對(duì)應(yīng)于黑啟動(dòng)階段形成的局部網(wǎng)絡(luò),{D1,D2,…,DN}為各時(shí)步的恢復(fù)決策,{S1,S2,…,SN}表示各個(gè)時(shí)步的目標(biāo)網(wǎng)架,SN為重構(gòu)完畢最終目標(biāo)網(wǎng)架,依據(jù)動(dòng)態(tài)規(guī)劃的基本原理,對(duì)離散后每一時(shí)步恢復(fù)決策從重構(gòu)全過(guò)程最優(yōu)角度優(yōu)化,每一時(shí)步以一個(gè)短期目標(biāo)網(wǎng)絡(luò)為恢復(fù)目標(biāo),以本時(shí)步恢復(fù)決策中機(jī)組、負(fù)荷得到啟動(dòng)功率為結(jié)束標(biāo)志及下一時(shí)步的開(kāi)始時(shí)刻,根據(jù)前一時(shí)步的狀態(tài)及本時(shí)步恢復(fù)決策遞推得到下一時(shí)步網(wǎng)絡(luò)狀態(tài)從而完成網(wǎng)架重構(gòu),求出整個(gè)過(guò)程的最優(yōu)決策序列集合,使整個(gè)重構(gòu)過(guò)程最優(yōu)。

圖1 分時(shí)步網(wǎng)架重構(gòu)過(guò)程Fig.1 Process of multiple discrete time-step network reconstruction
對(duì)后續(xù)網(wǎng)架重構(gòu)采用總體協(xié)調(diào)的分時(shí)步重構(gòu)策略優(yōu)化,設(shè)時(shí)步步長(zhǎng)為Δt,Δt取值應(yīng)適宜,太短則系統(tǒng)增發(fā)功率較少,不足以恢復(fù)更多機(jī)組、負(fù)荷,太長(zhǎng)則機(jī)組、負(fù)荷不能盡早恢復(fù),本文取Δt=0.25h。由于不同機(jī)組、負(fù)荷恢復(fù)路徑中線路倒閘操作需要耗費(fèi)時(shí)間,本文假設(shè)路徑中不同線路采用并行恢復(fù)方式,待恢復(fù)機(jī)組和負(fù)荷均可在時(shí)步末期獲得啟動(dòng)功率。
2.2 目標(biāo)函數(shù)
為通用性起見(jiàn),研究(n-1)Δt~nΔt時(shí)間段內(nèi)的網(wǎng)架重構(gòu),由于機(jī)組和重要負(fù)荷交替協(xié)調(diào)恢復(fù),將網(wǎng)架重構(gòu)問(wèn)題建模為多目標(biāo)優(yōu)化模型,針對(duì)機(jī)組恢復(fù)和重要負(fù)荷恢復(fù)及路徑恢復(fù)的不同特點(diǎn)分別建立其優(yōu)化目標(biāo)函數(shù),進(jìn)而構(gòu)建該時(shí)段內(nèi)網(wǎng)架重構(gòu)整體的多目標(biāo)優(yōu)化模型。在得到重構(gòu)過(guò)程各時(shí)段通用模型后,逐步優(yōu)化每一時(shí)步的恢復(fù)決策而最終完成網(wǎng)架重構(gòu)。
(1)機(jī)組恢復(fù)目標(biāo)。對(duì)于在本時(shí)步恢復(fù)的機(jī)組,綜合考慮機(jī)組特性及所處網(wǎng)絡(luò)拓?fù)湮恢玫纫蛩兀云鋯?dòng)后在整個(gè)網(wǎng)架重構(gòu)過(guò)程的加權(quán)發(fā)電量最大為目標(biāo),目標(biāo)函數(shù)為
式中,NG為系統(tǒng)中待啟動(dòng)機(jī)組的個(gè)數(shù);nΔt為第 n個(gè)時(shí)步結(jié)束時(shí)刻;T1為優(yōu)化總時(shí)間;Gi(i=1,…,NG)為待啟動(dòng)的第 i臺(tái)機(jī)組;ci為二元決策變量,機(jī)組Gi在本時(shí)步投入取1,否為0;αGi為Gi所在節(jié)點(diǎn)的重要度,以節(jié)點(diǎn)收縮后的網(wǎng)絡(luò)凝聚度表示[17];PGi(t)為Gi在t時(shí)刻的功率,由其特征參數(shù)決定,可通過(guò)簡(jiǎn)化的出力曲線獲取[24]。
(2)負(fù)荷恢復(fù)目標(biāo)。設(shè)每個(gè)負(fù)荷節(jié)點(diǎn)的負(fù)荷均包含Ⅰ、Ⅱ、Ⅲ三類(lèi)負(fù)荷,Ⅰ類(lèi)負(fù)荷比例為 10%~20%,Ⅱ類(lèi)負(fù)荷比例為 25%~45%,其余為Ⅲ類(lèi)負(fù)荷,負(fù)荷恢復(fù)優(yōu)化以恢復(fù)的加權(quán)負(fù)荷量最大為目標(biāo),即

式中,NL為系統(tǒng)中負(fù)荷節(jié)點(diǎn)的個(gè)數(shù);μⅠ、μⅡ、μⅢ為Ⅰ、Ⅱ、Ⅲ類(lèi)負(fù)荷之間的重要性比例系數(shù),取可使負(fù)荷恢復(fù)時(shí),優(yōu)先恢復(fù)Ⅰ類(lèi)負(fù)荷,再恢復(fù)Ⅱ、Ⅲ類(lèi)負(fù)荷;γj為負(fù)荷節(jié)點(diǎn) j(j=1,2,…,NL)中負(fù)荷的綜合權(quán)重,考慮其可靠性、重要性及所在節(jié)點(diǎn)重要度等因素,由層次分析法確定;決策變量 cⅠ,j、cⅡ,j、cⅢ,j表示負(fù)荷節(jié)點(diǎn) j中I、Ⅱ、Ⅲ類(lèi)負(fù)荷是否在本時(shí)步投入,是為1,否為0;PLⅠ,j、PLⅡ,j、PLⅢ,j為節(jié)點(diǎn) j中I、Ⅱ、Ⅲ類(lèi)負(fù)荷的有功功率。
(3)路徑恢復(fù)目標(biāo)。機(jī)組、負(fù)荷恢復(fù)時(shí)的恢復(fù)路徑優(yōu)化綜合考慮線路電壓等級(jí)變化的影響、充電無(wú)功和線路的拓?fù)渲匾缘纫蛩兀詫ふ掖鷥r(jià)最小的包含關(guān)鍵線路的路徑為目標(biāo),目標(biāo)函數(shù)為

式中,NR為系統(tǒng)中線路數(shù);決策變量 cl表示線路 l是否在本時(shí)步投入,是為 1,否為 0;XBl為線路 l的電納;φl(shuí)為線路l是否經(jīng)過(guò)電壓等級(jí)變換,是為1,否為0;轉(zhuǎn)換系數(shù)λ1、λ2取 0.5;為線路l歸一化后的介數(shù)[17]。
在分別定義了機(jī)組恢復(fù)、負(fù)荷恢復(fù)及路徑恢復(fù)的目標(biāo)函數(shù)后,擴(kuò)展黑啟動(dòng)后續(xù)的網(wǎng)架重構(gòu)可建模為如下的多目標(biāo)優(yōu)化模型

式中,F(xiàn)為目標(biāo)函數(shù)向量;G為等式約束條件;K為不等式約束條件。
2.3 約束條件集
(1)機(jī)組啟動(dòng)時(shí)間約束。熱啟動(dòng)機(jī)組 Gi的最大臨界熱啟動(dòng)時(shí)間約束為

式中,Ts,i為Gi的啟動(dòng)時(shí)刻;TCH,i為Gi的最大臨界熱啟動(dòng)時(shí)間。
冷啟動(dòng)機(jī)組 Gi的最小臨界啟動(dòng)時(shí)間約束為

式中,TCC,i為冷啟動(dòng)機(jī)組 Gi的最小臨界啟動(dòng)時(shí)間。
(2)單個(gè)負(fù)荷最大功率約束。每一時(shí)步投入的最大單個(gè)負(fù)荷功率應(yīng)小于本時(shí)步系統(tǒng)可承受的最大單個(gè)負(fù)荷功率以保持已恢復(fù)系統(tǒng)的穩(wěn)定性,使恢復(fù)過(guò)程能夠順利進(jìn)行,其約束為

式中,Pn,Lmax為第 n時(shí)步投入的最大單個(gè)負(fù)荷,取機(jī)組最大單個(gè)廠用電負(fù)荷、PLⅠ,j、PLⅡ,j、PLⅢ,j中的最大值;PLmax(n)是第 n時(shí)步可恢復(fù)的單個(gè)最大負(fù)荷,本文采用文獻(xiàn)[24]中的分段線性化方法計(jì)算各已并網(wǎng)機(jī)組的頻率響應(yīng)值,由機(jī)組的額定容量、頻率響應(yīng)值、最大允許頻率下降值(取 0.5Hz)可計(jì)算出PLmax(n)。
(3)系統(tǒng)啟動(dòng)功率約束。每一時(shí)步被啟動(dòng)的機(jī)組所需啟動(dòng)功率與恢復(fù)負(fù)荷的功率之和應(yīng)小于系統(tǒng)在此時(shí)步提供的啟動(dòng)功率,其約束為

式中,Pcr,i為機(jī)組 Gi所需啟動(dòng)功率;為系統(tǒng)在第n時(shí)步可提供的啟動(dòng)功率,其值為該時(shí)步之前所有并網(wǎng)的機(jī)組在當(dāng)前時(shí)步可增發(fā)的功率,即

式中,ei為機(jī)組 Gi在當(dāng)前時(shí)步是否已經(jīng)并網(wǎng)發(fā)電,是取 1,否取 0;NT為系統(tǒng)中機(jī)組總數(shù)目,包含所有待啟動(dòng)機(jī)組和黑啟動(dòng)電源。
(4)系統(tǒng)運(yùn)行約束。系統(tǒng)運(yùn)行約束主要包括已恢復(fù)系統(tǒng)的有功平衡和無(wú)功平衡,機(jī)組有功、無(wú)功出力范圍,節(jié)點(diǎn)電壓上下限制和線路功率不越限等潮流約束。
3 多目標(biāo)優(yōu)化模型的求解
3.1 優(yōu)化求解思路
在后續(xù)網(wǎng)架重構(gòu)過(guò)程中,機(jī)組的恢復(fù)是基礎(chǔ),處在不同拓?fù)湮恢玫臋C(jī)組快速啟動(dòng)可迅速擴(kuò)展電源點(diǎn)分布,為更大范圍的機(jī)組、更多重要負(fù)荷恢復(fù)優(yōu)化創(chuàng)造條件,路徑恢復(fù)為機(jī)組和負(fù)荷恢復(fù)提供功率,故機(jī)組、負(fù)荷和路徑三者恢復(fù)的重要程度不同,具有層次關(guān)系,各優(yōu)化目標(biāo)之間優(yōu)先級(jí)為FG>FL>FR,可采用分層序列法求解該多目標(biāo)優(yōu)化模型,機(jī)組恢復(fù)作為第一層優(yōu)化目標(biāo),負(fù)荷恢復(fù)為第二層優(yōu)化目標(biāo),路徑恢復(fù)為第三層優(yōu)化目標(biāo),分層后各層為單目標(biāo)優(yōu)化,也降低了求解復(fù)雜度。
模型的約束域是相互關(guān)聯(lián)的,其中單個(gè)負(fù)荷的最大功率約束及機(jī)組的啟動(dòng)時(shí)間約束可通過(guò)負(fù)荷預(yù)選和機(jī)組預(yù)選來(lái)實(shí)現(xiàn),通過(guò)對(duì)本時(shí)步優(yōu)化得到的目標(biāo)網(wǎng)絡(luò)潮流校核可檢驗(yàn)是否滿足運(yùn)行約束,故可將此模型松弛為由目標(biāo)函數(shù)和機(jī)組啟動(dòng)功率約束構(gòu)成的一維約束背包問(wèn)題。以下由分層序列法結(jié)合改進(jìn)細(xì)菌覓食算法和 Dijkstra算法對(duì)多目標(biāo)網(wǎng)架重構(gòu)模型具體求解。
3.2 機(jī)組層優(yōu)化求解
細(xì)菌覓食算法是模擬人類(lèi)大腸桿菌覓食行為的新型仿生算法[26],主要通過(guò)趨化操作、復(fù)制操作和遷徙操作三種操作進(jìn)行尋優(yōu)。將細(xì)菌覓食算法應(yīng)用于機(jī)組啟動(dòng)優(yōu)化,由于機(jī)組有啟動(dòng)或不啟動(dòng)兩種狀態(tài),細(xì)菌個(gè)體采用 0-1二進(jìn)制編碼,1表示相應(yīng)機(jī)組啟動(dòng),0表示不啟動(dòng),并采用改進(jìn)的趨化操作[27],細(xì)菌個(gè)體隨機(jī)選取兩個(gè)位置,其中間的編碼在操作中保持不變,其余位置編碼隨機(jī)發(fā)生變化,如果趨化后的新個(gè)體更優(yōu),則替換原個(gè)體。機(jī)組層優(yōu)化采用預(yù)選與優(yōu)選相結(jié)合方法,將當(dāng)前時(shí)步滿足啟動(dòng)條件的機(jī)組預(yù)選為備選待啟動(dòng)機(jī)組,再以改進(jìn)細(xì)菌覓食算法對(duì)備選機(jī)組優(yōu)化確定最優(yōu)機(jī)組,主要步驟為:
(1)根據(jù)上一時(shí)步已恢復(fù)系統(tǒng)的狀況,計(jì)算本時(shí)步系統(tǒng)可提供的啟動(dòng)功率及 PLmax(n)。
(2)將滿足啟動(dòng)時(shí)間限制的廠用電最大單個(gè)功率小于PLmax(n)的還未啟動(dòng)機(jī)組 Gi放入集合P。
(3)細(xì)菌群體初始化,設(shè)置細(xì)菌個(gè)體數(shù)S,趨化操作次數(shù) Nc、復(fù)制操作次數(shù) Nre、遷徙次數(shù) Ned及遷徙概率Ped,細(xì)菌編碼長(zhǎng)度為集合P中機(jī)組個(gè)數(shù),適應(yīng)度值取目標(biāo)函數(shù)FG。
(4)對(duì)每一細(xì)菌個(gè)體趨化操作,比較趨化后個(gè)體與原個(gè)體適應(yīng)度,若優(yōu)于原個(gè)體,則替換原個(gè)體。
(5)全部個(gè)體趨化后,進(jìn)入下一次趨化操作,直至達(dá)到指定趨化次數(shù)。
(6)對(duì)細(xì)菌個(gè)體按適應(yīng)度排序,適應(yīng)度較差的S/2個(gè)個(gè)體淘汰,剩下 S/2個(gè)個(gè)體復(fù)制。
(7)判斷是否達(dá)到最大復(fù)制次數(shù),是則轉(zhuǎn)向步驟(8),否則轉(zhuǎn)向步驟(4)。
(8)對(duì)每一細(xì)菌個(gè)體生成隨機(jī)數(shù),隨機(jī)數(shù)小于遷徙概率的個(gè)體淘汰,并生成新的個(gè)體。
(9)判斷是否達(dá)到最大遷徙次數(shù),是則輸出最優(yōu)個(gè)體,否則轉(zhuǎn)向步驟(4)。
3.3 負(fù)荷層優(yōu)化求解
將上述改進(jìn)細(xì)菌覓食算法應(yīng)用于負(fù)荷優(yōu)化,具體步驟如下:
(2)將單個(gè)負(fù)荷功率小于本時(shí)步 PLmax(n)、還未恢復(fù)的負(fù)荷作為本時(shí)步的備選待恢復(fù)負(fù)荷。
(3)初始化細(xì)菌種群,設(shè)置算法參數(shù),個(gè)體長(zhǎng)度取備選待恢復(fù)負(fù)荷數(shù),目標(biāo)函數(shù)取為FL。
(4)全部細(xì)菌個(gè)體完成指定次數(shù)的趨化操作。
(5)細(xì)菌個(gè)體復(fù)制操作,并判斷是否達(dá)到最大復(fù)制次數(shù),否則轉(zhuǎn)向步驟(4),是則轉(zhuǎn)向步驟(6)。
(6)細(xì)菌個(gè)體遷徙操作,并判斷是否達(dá)到最大遷徙次數(shù),否則轉(zhuǎn)向步驟(4),是則輸出最優(yōu)個(gè)體。
3.4 路徑恢復(fù)層的優(yōu)化
路徑恢復(fù)層的優(yōu)化一方面為機(jī)組、負(fù)荷恢復(fù)提供合理的路徑,另一方面也使系統(tǒng)中關(guān)鍵線路盡快恢復(fù),為最終骨架網(wǎng)絡(luò)目標(biāo)打下基礎(chǔ)。路徑優(yōu)化是由已恢復(fù)網(wǎng)絡(luò)到待恢復(fù)的機(jī)組、負(fù)荷目標(biāo)節(jié)點(diǎn)的最小支撐樹(shù)問(wèn)題,線路權(quán)值取為,路徑優(yōu)化按以下步驟進(jìn)行:
(2)依欲恢復(fù)目標(biāo)節(jié)點(diǎn)編號(hào)順序調(diào)用 Dijkstra算法,為每一目標(biāo)節(jié)點(diǎn)搜索恢復(fù)路徑。
(3)將搜索到的目標(biāo)節(jié)點(diǎn)恢復(fù)路徑中權(quán)值最小的路徑中所包含線路權(quán)值置為。
(4)判斷本時(shí)步欲恢復(fù)目標(biāo)節(jié)點(diǎn)是否恢復(fù)完畢,是則輸出各目標(biāo)節(jié)點(diǎn)權(quán)值最小的最優(yōu)恢復(fù)路徑;否則轉(zhuǎn)向步驟(2)。
在分別求得本時(shí)步最優(yōu)機(jī)組、負(fù)荷及恢復(fù)路徑后,對(duì)本時(shí)步形成的目標(biāo)網(wǎng)絡(luò)潮流校驗(yàn),以校核是否滿足各種運(yùn)行約束條件,若滿足,則重構(gòu)進(jìn)入下一時(shí)步;若不滿足,則適當(dāng)修改已恢復(fù)路徑上的負(fù)荷,重新進(jìn)行校核,直到滿足約束條件為止再進(jìn)入下一時(shí)步。
由于采取總體協(xié)調(diào)的分時(shí)步策略優(yōu)化后續(xù)網(wǎng)架重構(gòu),重構(gòu)開(kāi)始時(shí)總時(shí)間 T1未知,根據(jù)經(jīng)驗(yàn)設(shè)T1=4h,進(jìn)入重構(gòu)第一時(shí)步,依次優(yōu)化每一時(shí)步直至完成網(wǎng)架重構(gòu)(設(shè)所有滿足熱啟動(dòng)時(shí)間條件的機(jī)組全部啟動(dòng)為網(wǎng)架重構(gòu)結(jié)束標(biāo)志)得到重構(gòu)時(shí)間 T,若T1=T,網(wǎng)架重構(gòu)結(jié)束;否則,置T1=T,再重新進(jìn)行網(wǎng)架重構(gòu)優(yōu)化,直至兩者值相等,完成重構(gòu)。
4 擴(kuò)展黑啟動(dòng)方案后效性評(píng)估
4.1 網(wǎng)架重構(gòu)輸入輸出指標(biāo)
以生產(chǎn)函數(shù)的角度分析,后續(xù)網(wǎng)架重構(gòu)是多輸入多輸出的過(guò)程,輸入為構(gòu)建目標(biāo)網(wǎng)架耗費(fèi)的資源量,輸出為目標(biāo)網(wǎng)架,重構(gòu)效率以直觀量化形式綜合測(cè)度不同重構(gòu)方案輸入輸出不同引起的差異,可合理地表征擴(kuò)展黑啟動(dòng)方案的后效性。
數(shù)據(jù)包絡(luò)分析法(Data Envelop Analysis, DEA)是一種以數(shù)學(xué)規(guī)劃模型評(píng)價(jià)多輸入多輸出決策單元相對(duì)有效性的非參數(shù)方法[28],由于不需要預(yù)先對(duì)任何參數(shù)作假設(shè)及指標(biāo)標(biāo)準(zhǔn)化處理,完全依據(jù)實(shí)際數(shù)據(jù)對(duì)決策單元評(píng)估,避免了主觀因素的影響,評(píng)估結(jié)果更客觀,為擴(kuò)展黑啟動(dòng)方案的后續(xù)網(wǎng)架重構(gòu)相對(duì)效率評(píng)估提供了有效工具。充分發(fā)揮DEA評(píng)估相對(duì)效率客觀性的關(guān)鍵在于選擇合理的輸入輸出指標(biāo)集,結(jié)合指標(biāo)選取應(yīng)遵循的科學(xué)性、適用性和系統(tǒng)性等基本原則與網(wǎng)架重構(gòu)的具體特點(diǎn),選取以下的輸入輸出指標(biāo)。
4.1.1 輸入指標(biāo)
(1)機(jī)組和負(fù)荷恢復(fù)所需功率Pcr∑。后續(xù)網(wǎng)架重構(gòu)各時(shí)步恢復(fù)的機(jī)組所需啟動(dòng)功率與負(fù)荷功率加權(quán)和。即

式中,N為網(wǎng)架重構(gòu)時(shí)步數(shù);PL.n∑為 n時(shí)步恢復(fù)的負(fù)荷總量;Pcr.n∑為n時(shí)步啟動(dòng)的機(jī)組啟動(dòng)功率和;wcr.n為 n時(shí)步啟動(dòng)功率的權(quán)值,取值隨時(shí)步增加而減小。
(2)恢復(fù)路徑指標(biāo) Lc。為機(jī)組、負(fù)荷恢復(fù)提供啟動(dòng)功率的路徑指標(biāo)定義為

式中,U為最終目標(biāo)網(wǎng)架恢復(fù)的所有線路集合。
(3)網(wǎng)架重構(gòu)總時(shí)間Ts。網(wǎng)架重構(gòu)耗費(fèi)總時(shí)間,為各時(shí)步時(shí)長(zhǎng)之和。
4.1.2 輸出指標(biāo)
(1)啟動(dòng)機(jī)組總?cè)萘?PG∑。以各時(shí)步啟動(dòng)機(jī)組容量的加權(quán)和表示為

式中,NGn為時(shí)步n恢復(fù)的機(jī)組數(shù);wG.n為n時(shí)步啟動(dòng)的機(jī)組容量權(quán)值,隨著時(shí)步的增加而減小;PGj為n時(shí)步恢復(fù)的第j臺(tái)機(jī)組額定容量。
(2)恢復(fù)負(fù)荷總量 PL∑。負(fù)荷總量以各時(shí)步恢復(fù)的負(fù)荷節(jié)點(diǎn)中各類(lèi)負(fù)荷的加權(quán)和表示為

式中,NLn為時(shí)步n恢復(fù)的負(fù)荷數(shù);wL.n為時(shí)步n恢復(fù)負(fù)荷的權(quán)值,取值隨時(shí)步增加而減小。
(3)骨干網(wǎng)絡(luò)度 Mnet。以骨干網(wǎng)絡(luò)度來(lái)綜合衡量最終目標(biāo)網(wǎng)架結(jié)構(gòu)特征屬性,將Mnet定義為

4.2 網(wǎng)架重構(gòu)相對(duì)效率評(píng)估
DEA中基本 CCR模型的局限性是無(wú)法對(duì)效率值都為1的有效決策單元進(jìn)一步區(qū)分效率高低,隨后 Andersen等提出的將被評(píng)單元從參考集內(nèi)移去的超效率數(shù)據(jù)包絡(luò)分析模型(Super Efficiency DEA)克服了該缺陷,可實(shí)現(xiàn)對(duì)所有決策單元的全部排序。
假設(shè)有Q個(gè)擴(kuò)展黑啟動(dòng)后續(xù)網(wǎng)架重構(gòu)方案,對(duì)于某一方案Dk,評(píng)價(jià)其相對(duì)效率具有非阿基米德無(wú)窮小的輸入型SE-DEA模型為

式中,θ為被評(píng)價(jià)方案 Dk的相對(duì)效率值;λj為輸入輸出指標(biāo)的權(quán)重系數(shù);si-、sr+為松弛變量;ε為非阿基米德無(wú)窮小量,一般取10-6;xij和yrj分別為方案 Dj中第i個(gè)輸入指標(biāo)值和第 r個(gè)輸出指標(biāo)值;xik和 yrk分別為方案 Dk中第 i個(gè)輸入指標(biāo)值和第r個(gè)輸出指標(biāo)值。采用 SE-DEA模型評(píng)估網(wǎng)架重構(gòu)方案時(shí),以客觀的輸入輸出指標(biāo)數(shù)據(jù)為依據(jù),以數(shù)學(xué)規(guī)劃方法求取方案的相對(duì)效率值作為決策依據(jù)信息。
4.3 擴(kuò)展黑啟動(dòng)方案后效性評(píng)估流程
綜合上述多目標(biāo)網(wǎng)架重構(gòu)模型和 SE-DEA 模型,擴(kuò)展黑啟動(dòng)方案后效性評(píng)估流程如圖 2所示。

圖2 擴(kuò)展黑啟動(dòng)方案后效性評(píng)估流程Fig.2 Aftereffect evaluation process of extended black-start schemes
5 算例分析
5.1 算例描述
為了驗(yàn)證本文方法的有效性,以新英格蘭 10機(jī) 39節(jié)點(diǎn)系統(tǒng)為例對(duì)擴(kuò)展黑啟動(dòng)方案后效性進(jìn)行研究。設(shè)33節(jié)點(diǎn)為大型抽水蓄能電站,將其作為黑啟動(dòng)電源,各被啟動(dòng)機(jī)組參數(shù)如表1所示,假設(shè)31節(jié)點(diǎn)機(jī)組具有冷啟動(dòng)時(shí)限,最小臨界時(shí)限為4h,其余機(jī)組最大臨界熱啟動(dòng)時(shí)間為1.5h,通過(guò)技術(shù)校驗(yàn)合格的三套擴(kuò)展黑啟動(dòng)方案如表2所示。算法參數(shù)設(shè)置為:S=50,Nc=10,Nre=5,Ned=5,Ped=0.5。

圖3 新英格蘭10機(jī)39節(jié)點(diǎn)系統(tǒng)Fig.3 New England 10-unit 39-bus power system

表1 被啟動(dòng)機(jī)組的啟動(dòng)參數(shù)Tab.1 Parameters of the units to be restored
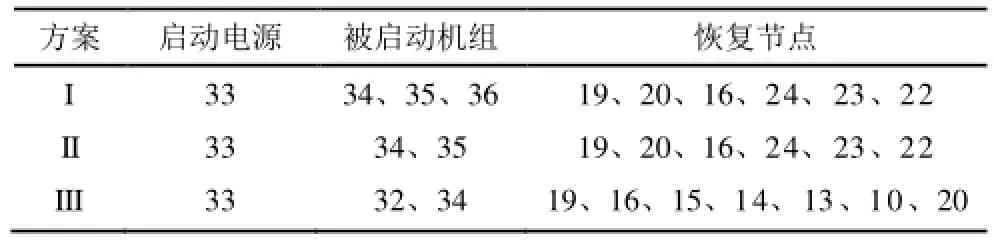
表2 技術(shù)可行的擴(kuò)展黑啟動(dòng)方案Tab.2 Technically feasible extended black-start schemes
5.2 計(jì)算結(jié)果
利用本文構(gòu)建的多目標(biāo)網(wǎng)架重構(gòu)模型在表2中各不同擴(kuò)展黑啟動(dòng)方案黑啟動(dòng)階段形成的局部網(wǎng)絡(luò)基礎(chǔ)上進(jìn)行網(wǎng)架重構(gòu),得到各自后續(xù)網(wǎng)架重構(gòu)方案如表3所示。

表3 各擴(kuò)展黑啟動(dòng)方案后續(xù)的網(wǎng)架重構(gòu)方案Tab.3 The subsequent network reconstruction schemes based on different extended black-start schemes
權(quán)重系數(shù)wcr.n、wG.n和wL.n第一時(shí)步取1,第二時(shí)步取 0.6,計(jì)算出不同的擴(kuò)展黑啟動(dòng)方案下網(wǎng)架重構(gòu)的輸入輸出指標(biāo)值如表 4所示。

表4 各恢復(fù)方案的輸入輸出指標(biāo)值Tab. 4 The inputs and outputs of all restoration plans
按照輸入型SE-DEA模型式(15)分別對(duì)各個(gè)重構(gòu)方案建立評(píng)估模型,利用規(guī)劃軟件 lingo進(jìn)行求解,得到各個(gè)方案的相對(duì)效率評(píng)估結(jié)果如表5所示。

表5 各恢復(fù)方案的相對(duì)效率評(píng)估結(jié)果Tab.5 The assessment results of relative efficiency for all restoration plans
5.3 結(jié)果分析
從表2~表4中可以看出,方案I形成的小系統(tǒng)包含4臺(tái)機(jī)組,其一個(gè)時(shí)步即可啟動(dòng)所有待恢復(fù)機(jī)組及部分重要負(fù)荷完成網(wǎng)架重構(gòu);方案II與方案 III都是由黑啟動(dòng)電源啟動(dòng)2臺(tái)機(jī)組,但方案III中 32號(hào)機(jī)組升負(fù)荷率較方案 II中 35號(hào)機(jī)組慢,在其啟動(dòng)后為后續(xù)恢復(fù)提供的功率較小,方案II一步即可完成網(wǎng)架重構(gòu),而方案 III需要兩步才能完成。故綜合考慮了網(wǎng)架重構(gòu)多輸入多輸出要素后的相對(duì)效率評(píng)估結(jié)果中,方案I效率最高,方案II次之,方案III效率第三。對(duì)每一方案的各個(gè)時(shí)步恢復(fù)過(guò)程進(jìn)行潮流校驗(yàn),方案 I最高電壓為 U22=1.071(pu);方案II最高電壓為 U29=1.09(pu);方案 III最高電壓為U19=1.06(pu),均滿足系統(tǒng)運(yùn)行條件的約束。
通過(guò)對(duì)三個(gè)不同擴(kuò)展黑啟動(dòng)方案后效性評(píng)估可知后續(xù)網(wǎng)架重構(gòu)的效率與黑啟動(dòng)階段形成的小網(wǎng)絡(luò)機(jī)組容量、機(jī)組特性、網(wǎng)絡(luò)節(jié)點(diǎn)的拓?fù)湮恢玫纫蛩孛芮邢嚓P(guān),包含的機(jī)組越多,機(jī)組升負(fù)荷率越快,容量越大,節(jié)點(diǎn)越重要,為后續(xù)恢復(fù)提供的功率越大,恢復(fù)的時(shí)間越短,效率越高。在綜合選擇擴(kuò)展黑啟動(dòng)方案時(shí),不僅要考慮黑啟動(dòng)恢復(fù)初期階段效果,還要計(jì)及對(duì)后續(xù)恢復(fù)的影響,選擇綜合效果好的方案,本文提出的擴(kuò)展黑啟動(dòng)后效性評(píng)估方法能夠有效評(píng)估后續(xù)網(wǎng)架重構(gòu)效率,進(jìn)一步完善了擴(kuò)展黑啟動(dòng)方案的評(píng)估體系。
5 結(jié)論
本文提出了基于多目標(biāo)網(wǎng)架重構(gòu)模型與超效率數(shù)據(jù)包絡(luò)分析模型相結(jié)合的擴(kuò)展黑啟動(dòng)方案后效性評(píng)估方法。采用總體協(xié)調(diào)的分時(shí)步重構(gòu)策略可從全局整體最優(yōu)角度優(yōu)化得到每一時(shí)步的恢復(fù)措施進(jìn)而完成重構(gòu)過(guò)程得到目標(biāo)網(wǎng)架,所構(gòu)建的多目標(biāo)網(wǎng)架重構(gòu)模型可有效兼顧機(jī)組、負(fù)荷及路徑的協(xié)調(diào)恢復(fù);建立的指標(biāo)體系能夠全面系統(tǒng)反映網(wǎng)架重構(gòu)的多輸入輸出特征,超效率數(shù)據(jù)包絡(luò)分析模型對(duì)表征擴(kuò)展黑啟動(dòng)方案后效性的后續(xù)網(wǎng)架重構(gòu)相對(duì)效率客觀評(píng)估。算例分析結(jié)果驗(yàn)證了所提方法的正確性與有效性,對(duì)恢復(fù)方案的綜合決策提供重要參考。
[1] 張東霞, 姚良忠, 馬文媛. 中外智能電網(wǎng)發(fā)展戰(zhàn)略[J]. 中國(guó)電機(jī)工程學(xué)報(bào), 2013, 33(31): 1-14.
Zhang Dongxia, Yao Liangzhong, Ma Wenyuan. Development strategies of smart grid in China and abroad [J]. Proceedings of the CSEE, 2013, 33(31): 1-14.
[2] 薛禹勝, 肖世杰. 綜合防御高風(fēng)險(xiǎn)的小概率事件[J].電力系統(tǒng)自動(dòng)化, 2011, 35(8): 1-11.
Xue Yusheng, Xiao Shijie. Comprehensively defending high risk events with low probability[J]. Automation of Electric Power Systems, 2011, 35(8): 1-11.
[3] 湯涌, 卜廣全, 易俊. 印度“7. 30”、“7. 31”大停電事故分析及啟示[J]. 中國(guó)電機(jī)工程學(xué)報(bào), 2012, 32(25): 167-174.
Tang Yong, Bu Guangquan, Yi Jun. Analysis and lessons of the blackout in indian power grid on july 30 and 31, 2012[J]. Proceedings of the CSEE, 2012, 32(25): 167-174.
[4] 毛安家, 張戈力, 呂躍春, 等. 2011年9月8日美墨大停電事故的分析及其對(duì)我國(guó)電力調(diào)度運(yùn)行管理的啟示[J]. 電網(wǎng)技術(shù), 2012, 36(4): 74-78.
Mao Anjia, Zhang Geli, Lv Yuechun, et al. Analysis on large-scale blackout occurred in south america and north mexico interconnected power grid on sept. 8, 2011 and lessons for electric power dispatching in China[J]. Power System Technology, 2012, 36(4): 74-78.
[5] Adibi M M, Fink L H. Power system restoration planning[J]. IEEE Transactions on Power Systems, 1994, 9(1): 22-28.
[6] Lester H F, Lion K L, Liu C C. From generic restoration to specific restoration strategies[J]. IEEE Trans. on Power Systems, 1995, 10(2): 745-752.
[7] Jerry J A. A framework for power system restoration following a major power failure[J]. IEEE Transactions on Power Systems, 1995, 10(3): 1480-1485.
[8] Gomes R, Carlos A, Guarini A. Guidelines for power system restoration in the brazilian system[J]. IEEE Transactions on Power Systems, 2004, 9(2): 1159-1164.
[9] Delfino B, Denegri G B, Invernizzi M, et al. Blackstart and restoration of a part of the Italian HV network: modeling and simulation of a field test[J]. IEEE Trans. on Power Systems, 1996, 11(3): 1371-1379.
[10] 張玉瓊, 顧雪平. 基于隨機(jī)統(tǒng)計(jì)分析的黑啟動(dòng)操作過(guò)電壓的計(jì)算校驗(yàn)[J]. 電工技術(shù)學(xué)報(bào), 2005, 20(5): 92-97.
Zhang Yuqiong, Gu Xueping. Computation and statistical evaluation of operating over voltages in blackstart process of power systems[J]. Transactions of China Electrotechnical Society, 2005, 20(5): 92-97.
[11] 吳燁, 房鑫炎. 基于模糊 DEA 模型的電網(wǎng)黑啟動(dòng)方案評(píng)估優(yōu)化算法[J]. 電工技術(shù)學(xué)報(bào), 2008, 23(8): 101-106.
Wu Ye, Fang Xinyan. Data envelopment analysis based optimal fuzzy algorithm for assessing power grid black-start plans[J]. Transactions of China Electrotechnical Society, 2008, 23(8): 101-106.
[12] 林振智, 文福拴, 薛禹勝, 等. 基于多屬性群決策特征根法的智能電網(wǎng)黑啟動(dòng)決策[J]. 電力系統(tǒng)自動(dòng)化, 2010, 34(5): 18-23.
Lin Zhenzhi, Wen Fushuan, Xue Yusheng, et al. Blackstart decision-making in smart grids using muti-attribute group eigenvalue method[J]. Automation of Electric Power Systems, 2010, 34(5): 18-23.
[13] 吳燁, 房鑫炎, 張焰, 等. 電網(wǎng)黑啟動(dòng)的廣義模式評(píng)估算法[J]. 電工技術(shù)學(xué)報(bào), 2011, 26(3): 155-161.
Wu Ye, Fang Xinyan, Zhang Yan, et al. Generalized assessment algorithm for power grid black-start modes [J]. Transactions of China Electrotechnical Society, 2011, 26(3): 155-161.
[14] 林濟(jì)鏗, 李童飛, 趙子明, 等. 基于熵權(quán)模糊綜合評(píng)價(jià)模型的電力系統(tǒng)黑啟動(dòng)方案評(píng)估[J]. 電網(wǎng)技術(shù), 2012, 36(2): 115-120.
Lin Jikeng, Li Tongfei, Zhao Ziming, et al. Assessment on power system black-start schemes based onentropy weighted fuzzy comprehensive evaluation model[J]. Power System Technology, 2012, 36(2): 115-120.
[15] 顧雪平, 鐘慧榮, 賈京華, 等. 電力系統(tǒng)擴(kuò)展黑啟動(dòng)方案的研究[J]. 中國(guó)電機(jī)工程學(xué)報(bào), 2011, 31(28): 25-32.
Gu Xueping, Zhong Huirong, Jia Jinghua, et al. Extended black-start schemes of power systems[J]. Proceedings of the CSEE, 2011, 31(28): 25-32.
[16] Liu Yan, Gu Xueping. Skeleton network reconfiguration based on topological characteristics of scalefree networks and discrete particle swarm optimization [J]. IEEE Transactions on Power Systems, 2007, 22(3): 1267-1274.
[17] 王亮, 劉艷, 顧雪平, 等. 綜合考慮節(jié)點(diǎn)重要度和線路介數(shù)的網(wǎng)絡(luò)重構(gòu)[J]. 電力系統(tǒng)自動(dòng)化, 2010, 34(12): 29-33.
Wang Liang, Liu Yan, Gu Xueping, et al. Skeleton network reconfiguration based on node importance and line betweenness[J]. Automation of Electric Power Systems, 2010, 34(12): 29-33.
[18] 周云海, 閔勇. 恢復(fù)控制中的系統(tǒng)重構(gòu)優(yōu)化算法研究[J]. 中國(guó)電機(jī)工程學(xué)報(bào), 2003, 23(4): 67-71.
Zhou Yunhai, Min Yong. Optimal algorithm for system reconstruction[J]. Proceedings of the CSEE, 2003, 23(4): 67-71.
[19] 劉強(qiáng), 石立寶, 倪以信, 等. 電力系統(tǒng)恢復(fù)控制的網(wǎng)絡(luò)重構(gòu)智能優(yōu)化策略[J]. 中國(guó)電機(jī)工程學(xué)報(bào), 2009, 29(13): 8-15.
Liu Qiang, Shi Libao, Ni Yixin, et al. Intelligent optimization strategy of the power grid reconfiguration during power system restoration[J]. Proceedings of the CSEE, 2009, 29(13): 8-15.
[20] 林振智, 文福拴. 基于加權(quán)復(fù)雜網(wǎng)絡(luò)模型的恢復(fù)路徑優(yōu)化方法[J]. 電力系統(tǒng)自動(dòng)化, 2009, 33(6): 11-15, 103.
Lin Zhenzhi, Wen Fushuan. A new optimization method for determining restoration paths based on weighted complex network model[J]. Automation of Electric Power Systems, 2009, 33(6): 11-15, 103.
[21] 周云海, 劉映尚, 胡翔勇. 大停電事故后的系統(tǒng)網(wǎng)架恢復(fù)[J]. 中國(guó)電機(jī)工程學(xué)報(bào), 2008, 28(10): 32-36.
Zhou Yunhai, Liu Yingshang, Hu Xiangyong. Power system network reconstruction after blackout[J]. Proceedings of the CSEE, 2008, 28(10): 32-36.
[22] 王洪濤, 劉玉田. 電力系統(tǒng)恢復(fù)的主從遞階決策模型及其優(yōu)化算法[J]. 中國(guó)電機(jī)工程學(xué)報(bào), 2007, 27(1): 8-13.
Wang Hongtao, Liu Yutian. Leader-follower hierarchical decision model and optimal method for power system restoration[J]. Proceedings of the CSEE, 2007, 27(1): 8-13.
[23] 王洪濤, 劉玉田. 基于 NSGA-Ⅱ的多目標(biāo)輸電網(wǎng)架最優(yōu)重構(gòu)[J]. 電力系統(tǒng)自動(dòng)化, 2009, 33(23): 14-18.
Wang Hongtao, Liu Yutian. Multi-objective optimization of power system reconstruction based on NSGAII[J]. Automation of Electric Power Systems, 2009, 33(23): 14-18.
[24] Gu X, Zhong H. Optimisation of network reconfiguration based on a two-layer unit-restarting framework for power system restoration[J]. IET Generation, Transmission & Distribution, 2011, 6(7): 693-700.
[25] Zhang Can, Lin Zhenzhi, Wen Fushuan, et al. Two stage power network reconfiguration strategy considering node importance and restored generation capacity [J]. IET Generation, Transmission & Distribution, 2014, 8(1): 91-103.
[26] Passino K M. Biomimicry of bacterial foraging for distributed optimization and control[J]. IEEE Control Systems Magazine, 2002, 22(6): 52-67.
[27] 戴秋萍, 馬良, 郗瑩. 求解0-1背包問(wèn)題的細(xì)菌覓食算法[J]. 數(shù)學(xué)的實(shí)踐與認(rèn)識(shí), 2013, 43(3): 178-183.
Dai Qiuping, Ma Liang, Xi Ying. Bacterial foraging algorithm for 0-1 knapsack problem[J]. Mathematics in Practice and Theory, 2013, 43(3): 178-183.
[28] 馬占新. 數(shù)據(jù)包絡(luò)分析模型與方法[M]. 北京: 科學(xué)出版社, 2010.
Investigation on Aftereffect of Power System Extended Black-Start Schemes
Gu Xueping1 Wang Dajiang1 Li Shaoyan1 Li Wenyun2 Zhu Tao2 Zhao Chuan2
(1. State Key Laboratory of Alternate Electrical Power System with Renewable Energy Sources North China Electric Power University Baoding 071003 China 2. Yunnan Electric Power Dispatching and Control Center Kunming 650011 China)
The extended black-start strategy during the early recovery stage after blackout provides a new way for power system restoration. In order to evaluate the aft ereffect of an extended black-start scheme, through discretizing the network reconstruction process into a series of successive time steps, a multi-objective network reconstruction optimization model considering the alternation and coordination that unit restarting with load restoration during subsequent reconstruction process is established, and then a solving method combining the lexicographic optimization method with improved bacterial foraging algorithm and Dijkstra algorithm is proposed to solve the model. The units, loads and restoration paths in each time step are optimized from the perspective of the global optimum to obtain the optimal reconstruction scheme. After that, by defining a group of input and output indexes reflecting the multiple elements of reconstruction process, the relative efficiency of the subsequent reconstruction, which represents the aftereffect of the extended black-start scheme, are evaluated by using the super efficiency data envelopment analysis model. The test results on the New England 10-unit 39-bus system verified the validity and correctness of the proposed method.
Extended black-start, aftereffect, data envelop analysis, network reconstruction, multi-objective optimization
TM76
顧雪平 男,1964年生,教授,博士生導(dǎo)師,主要研究方向?yàn)殡娏ο到y(tǒng)安全防御與恢復(fù)控制、智能技術(shù)在電力系統(tǒng)中的應(yīng)用。
國(guó)家自然科學(xué)基金(51277076),高等學(xué)校博士學(xué)科點(diǎn)專項(xiàng)科研基金(20110036110007)和中央高校基本科研業(yè)務(wù)費(fèi)專項(xiàng)資金(13XS23)資助項(xiàng)目。
2014-06-19 改稿日期 2014-12-24
王大江 男,1984年生,博士研究生,研究方向?yàn)殡娏ο到y(tǒng)安全防御與恢復(fù)控制。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
