UWB雷達抗多普勒模糊技術研究
2015-04-13 18:20:37陳國斌彭黎麗唐佳
現代電子技術 2015年1期
陳國斌 彭黎麗 唐佳
摘 要: 研究了一種基于頻帶分割的低PRF模式下的抗多普勒模糊處理方法。通過對多個通道相參積累后的結果進行合成,在保證距離不模糊的前提下,解決了速度模糊問題。仿真結果驗證了算法的正確性與合理性。
關鍵詞: 多普勒模糊; 頻帶分割; 速度模糊; 算法驗證
中圖分類號: TN957?34 文獻標識碼: A 文章編號: 1004?373X(2015)01?0012?03
Abstract: A method based on band segmentation to resolve Doppler ambiguity in low PRF mode is investigated in this paper. Doppler ambiguity was resolved without range ambiguity in combination with coherent integration of multiple channels. The simulation result show that the algorithm is correct and reasonable.
Keywords: Doppler ambiguity; intersection of frequency spectrum; speed ambiguity; algorithm verification
0 引 言
作為一種新體制的雷達, 超寬帶(Ultra?Wide Band,UWB)雷達的研究越來越受到人們的關注。由于發射機峰值功率受硬件水平的限制, 超寬帶雷達發射信號往往采用大時寬帶寬積信號, 這種信號具有大的相對帶寬(大于25%)和大的絕對帶寬。超寬帶意味著需要高采樣率A/D來滿足采樣定律。而受到器件本身的限制,A/D的采樣率很難滿足大帶寬要求,而即使能夠滿足高采樣率的要求,其有效位寬往往很有限,這樣就使系統的動態范圍受限。因而需要采用基于頻帶分割的多通道雷達接收機。接收機中的多通道數據采集方法是先通過模擬濾波器組對信號進行頻帶分割, 在每個子帶上用相對較低速率的A/D進行采樣, 然后進行子帶脈沖壓縮或信號處理[1]。
模糊問題是脈沖多普勒雷達的固有問題。在目標的延遲時間大于發射脈沖的重復周期時,會產生距離模糊。當目標運動引起的多普勒頻率大于發射脈沖的重復頻率時,會產生速度模糊[2]。對高速目標來說距離和多普勒模糊會產生錯誤信息并會影響接下來的目標跟蹤,因此如何解決脈沖多普勒雷達的模糊問題是實際應用中的一個很重要的問題。為測量高多普勒頻率傳統上主要采用兩種方式,一種是直接設計高PRF來抗多普勒模糊,另一種就是采用多重頻解參差的方法去多普勒模糊。前者直接帶來的后果就是距離模糊,無法測量遠距離信息。而對于后者,需要通過解參差來測量距離信息。對于具有遠距離探測能力地面雷達,其發射功率巨大,使得近區雜波多趨于飽和,即使使用MTI技術也無法在近區雜波中檢測出有用的目標信息。為了避免檢測通道阻塞,通常的做法是舍棄近區檢測數據,這樣就會導致在解距離模糊時產生很大的距離盲區。
為了解決超寬帶雷達在處理上帶來的上述問題,本文提出了一種頻率分割的處理方式。在設計中使用低PRI發射波形,使得距離上不存在模糊。在頻域上分割出的多個子帶,由于射頻中心頻率不同,對于相同的目標速度,每個子帶回波攜帶的多普勒不一致,通過將多個子帶進行速度濾波,合成后能夠在對應的速度上形成惟一的峰值,有效地避免了速度模糊。
1 多普勒濾波器組
頻率分割處理流程如圖1所示。雷達接收到的目標回波信號通過頻率分割接收機將寬帶信號分割成多個子帶輸出。每個子帶具有相同的中頻中心頻率和帶寬,因此每個子帶的處理流程可以統一設計,有效的節省設計時間,提高研發效率。
在進行相參積累將時域信號轉換為多普勒域時,簡單的FFT處理無法補償掉不同子帶之間多普勒頻率差異。這就需要將多普勒維轉換為速度維進行處理,本文提出了基于速度維多普勒濾波器組的概念。所謂的速度維多普勒濾波器組就是以速度為橫坐標,建立每個通道對應的同一速度的多普勒濾波器。假設在速度維上劃分[M]個等間隔點,對于具有[N]個子帶的系統,就需要[M×N]個多普勒濾波器。
2 低PRF抗多普勒模糊
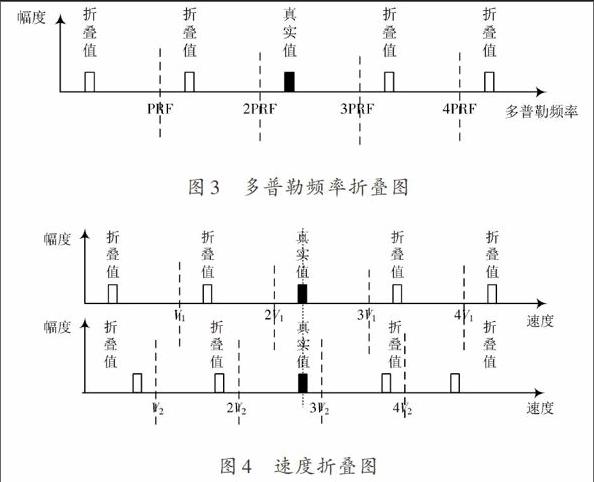
對于單個子帶而言,低PRF意味著多普勒存在嚴重的模糊。當多普勒頻率大于PRF時,就會以PRF為周期進行折疊,如圖3所示。不同的子帶由于其射頻中心頻率不同,所以速度的折疊周期也不同。也就是說,對于每個子帶,除真實速度外其他折疊速度都不可能在同一個速度點上。圖4可以很好地說明這一點。圖中[V1]為子帶1的速度折疊周期,[V2]為子帶2的速度折疊周期。兩個子帶的真實值出現在一維距離像中的同一速度點上,而折疊值則分布在不同的速度點上。
3 仿真結果與分析
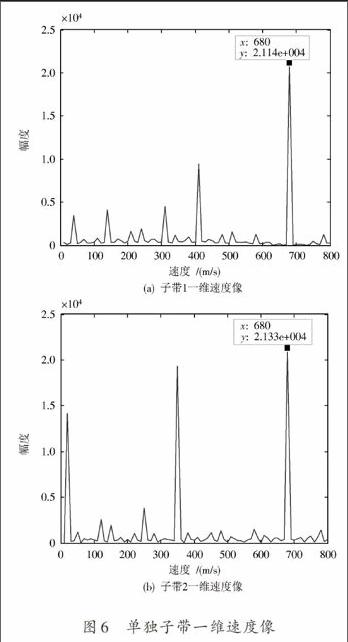
仿真采用了16個子帶系統,每個子代的中心頻率間隔為12.5 MHz,相參積累脈沖個數為64,目標速度為2碼赫。圖6為選取的某兩個子帶對應的一維速度像。從圖中可看出,每一個子帶的速度出現了多個峰值,除標注的真實速度外,其他的均為速度模糊折疊后的值。兩個子帶除真實速度外,其他由于折疊產生的峰值均不在同一個速度點上。
對16個子帶進行速度維的合成,合成后的結果如圖7所示。從圖7可以看出,合成后的一維速度像在真實速度點處形成了一個惟一的峰值,即真實目標的速度值。
4 結 語
本文將頻率分割以及速度濾波器組引入到超寬帶雷達信號處理中。通過速度濾波器組形成每個子帶一維速度像,然后進行多個子帶的合成,能夠很好地解決單個子帶速度模糊(多普勒模糊)問題。而且該抗多普勒模糊的方法不受PRF的限制,從而很好地解決了最大模糊速度與最大模糊距離的矛盾沖突。該處理方法對超寬帶雷達信號處理具有很好的參考價值。
參考文獻
[1] HUSSAIN M G M. Principle of High?Resolution Radar Based on Nonsinusoidal Waves? Part Ⅱ: Generalized Ambiquity Function [J]. IEEE T?EMC, 1989, 31(4): 369?375.
[2] GERLACH K, ANDREWS G A. Cascaded detector for multiple high?PRF pulse Doppler radars [J]. IEEE Transactions on Aerospace and Electronic System s, 1990, 26(5): 754?767.
[3] 徐敏.單脈沖測量雷達測速技術研究[J].現代雷達,2005,27(1):58?61.
[4] 毛士藝,張瑞生,許偉武,等.脈沖多普勒雷達[M].北京:國防工業出版社,1990.
[5] 陳登偉,汪連棟,李永禎,等.機載脈沖多普勒雷達地雜波的相干信號仿真研究[J].現代電子技術,2006,29(10):61?64.
[6] 秦勤.對多種體制雷達多普勒干擾的研究[J].現代電子技術,2010,33(17):23?26.
