數(shù)控機(jī)床控制系統(tǒng)PID參數(shù)自整定方法研究*
2015-04-15 07:29:50付蘭慧曹永軍深圳市方元數(shù)控科技有限公司廣東深圳58055廣東省自動(dòng)化研究所廣東廣州50000
機(jī)電工程技術(shù) 2015年8期
付蘭慧,周 磊,曹永軍(.深圳市方元數(shù)控科技有限公司,廣東深圳 58055;.廣東省自動(dòng)化研究所,廣東廣州 50000)
數(shù)控機(jī)床控制系統(tǒng)PID參數(shù)自整定方法研究*
付蘭慧1,周磊2,曹永軍2
(1.深圳市方元數(shù)控科技有限公司,廣東深圳518055;2.廣東省自動(dòng)化研究所,廣東廣州510000)
摘要:數(shù)控機(jī)床在整個(gè)現(xiàn)代制造工業(yè)中處于核心地位,針對(duì)數(shù)控機(jī)床控制系統(tǒng)的三環(huán)結(jié)構(gòu)設(shè)計(jì)了一種PID控制器整定方法;對(duì)數(shù)控機(jī)床位置環(huán)進(jìn)行了機(jī)理建模、分析,通過RMSE評(píng)價(jià)機(jī)制得到系統(tǒng)模型;采用單純形法尋優(yōu)參數(shù),并采用參數(shù)優(yōu)化的方法和辨識(shí)方法提出一套自整定機(jī)制,討論了如何選擇優(yōu)化準(zhǔn)則,找出不同性能指標(biāo)要求下適合的優(yōu)化標(biāo)準(zhǔn)。實(shí)驗(yàn)證明,通過該自整定機(jī)制得到的控制器參數(shù)可以應(yīng)用到數(shù)控機(jī)床的加工生產(chǎn)中。
關(guān)鍵詞:數(shù)控機(jī)床;系統(tǒng)辨識(shí);單純形法;自整定;PID控制器
*廣東省科技計(jì)劃項(xiàng)目(編號(hào):2012B011300066);廣東省產(chǎn)學(xué)研項(xiàng)目(編號(hào):2012B091400048)
1 概述
在工業(yè)中,三環(huán)控制是數(shù)控系統(tǒng)控制結(jié)構(gòu)所采用的經(jīng)典方式,如圖1所示,即電流環(huán)、速度環(huán)和位置環(huán)[1]。其中,電流環(huán)、速度環(huán)通常由驅(qū)動(dòng)器來完成;位置環(huán)控制通常在運(yùn)動(dòng)控制器中實(shí)現(xiàn),以達(dá)到更好的軌跡控制。但是,控制器參數(shù)常常是依據(jù)現(xiàn)場(chǎng)調(diào)試和經(jīng)驗(yàn)人工進(jìn)行設(shè)定的,這樣就會(huì)要求操作者有一定的經(jīng)驗(yàn),而且會(huì)很大程度地降低加工的效率,已有的PID參數(shù)人工整定法對(duì)技術(shù)操作員的經(jīng)驗(yàn)要求高,并且較耗力耗時(shí)。PID控制器參數(shù)整定的方法很多,基本上分為在辨識(shí)被控對(duì)象參數(shù)的基礎(chǔ)上進(jìn)行整定法、抽取過程對(duì)象輸出特征點(diǎn)的整定法、基于模式識(shí)別的專家系統(tǒng)整定法及基于參數(shù)優(yōu)化方法等[2-5]。本文綜合采用上述方法,提出一套靈活性高、快速性好且精確度高的PID自整定機(jī)制,從而代替人工手調(diào),本文的研究在工業(yè)自動(dòng)化生產(chǎn)中具有重要的意義。
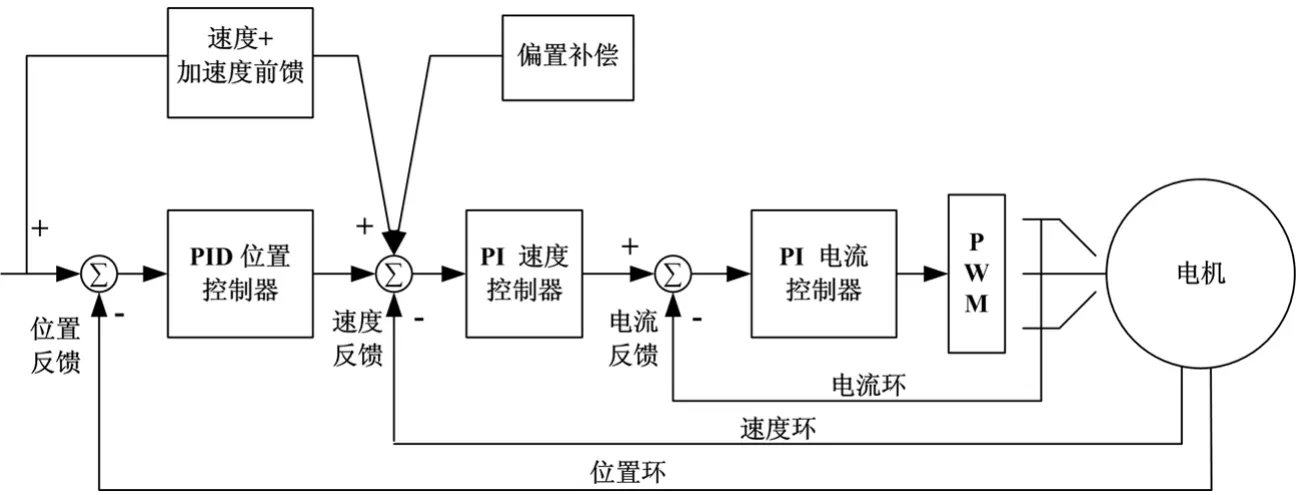
圖1 三環(huán)控制的結(jié)構(gòu)圖
2 數(shù)控機(jī)床的建模
2.1系統(tǒng)建模
數(shù)控系統(tǒng)中,采用電機(jī)和負(fù)載的模型為:
T=ω/(Js+B)(1)
其中:B——粘滯摩擦系數(shù);
J——系統(tǒng)的轉(zhuǎn)矩慣量。
速度環(huán)與電流環(huán)的帶寬比一般在十倍以上,因此,電流環(huán)的快速響應(yīng)可近似為比例增益KI[6],速度環(huán)的控制器一般為PI控制器,那么速度環(huán)模型可以近似為二階模型。機(jī)械傳動(dòng)機(jī)構(gòu)是帶有比例的積分環(huán)節(jié),因此從位置環(huán)來分析,被控對(duì)象可近似為三階,即三階模型是能夠表述被控對(duì)象的最低階次。此模型是文中的重點(diǎn)研究對(duì)象,圖2所示為其結(jié)構(gòu)框圖,其中CT為伺服電機(jī)轉(zhuǎn)矩系數(shù)。
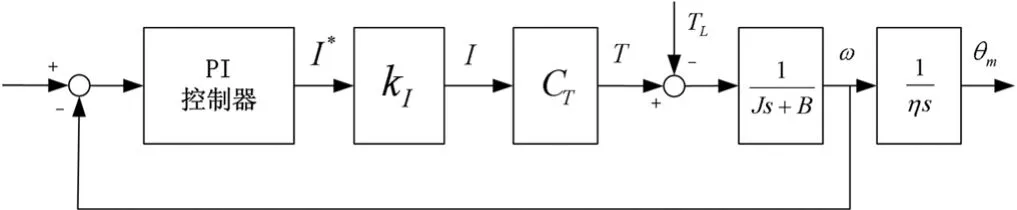
圖2 被控對(duì)象結(jié)構(gòu)框圖
2.2系統(tǒng)辨識(shí)
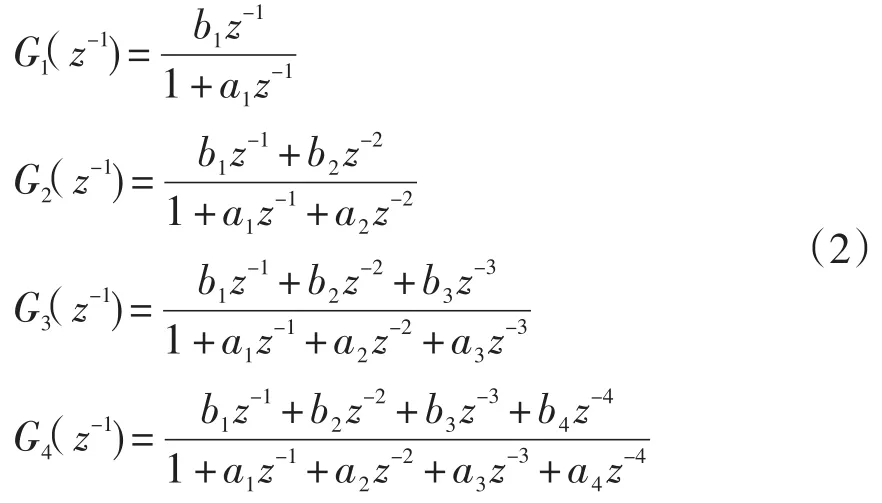
輸入信號(hào)選用頻率在0~100 Hz的掃頻信號(hào),采用最小二乘法進(jìn)行辨識(shí)。在前面建模得出,系統(tǒng)物理模型是三階連續(xù)域模型,但數(shù)控系統(tǒng)是離散控制系統(tǒng),依次引入四個(gè)模型,如式(2)所示。通過實(shí)驗(yàn)驗(yàn)證的方法來選取適當(dāng)?shù)碾x散模型。
對(duì)四個(gè)階次的模型進(jìn)行辨識(shí),分別將估計(jì)輸出與實(shí)際采集的輸出進(jìn)行對(duì)比,結(jié)果如圖3所示。
將不同階次的模型與平臺(tái)實(shí)際輸出的均方根誤差(RMSE)列在表1中。
從中容易看出,能準(zhǔn)確表達(dá)實(shí)際系統(tǒng)需要選擇三階或以上的模型。
為方便后邊章節(jié)引用,以四階無延遲模型為例,其傳遞函數(shù)為:
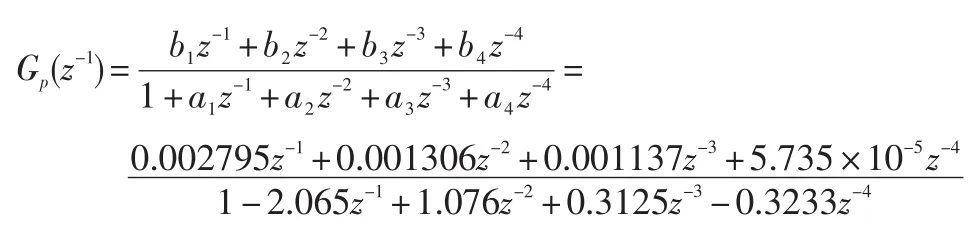
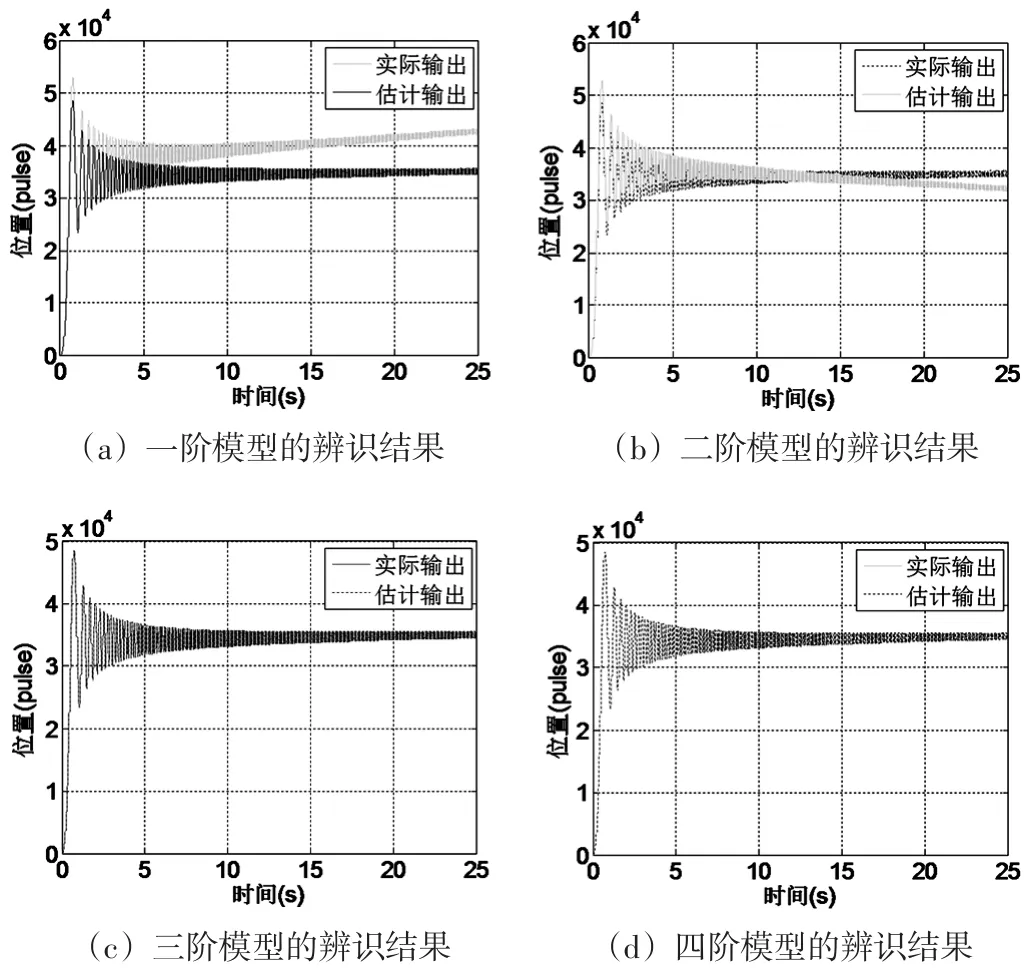
圖3 模型的辨識(shí)結(jié)果
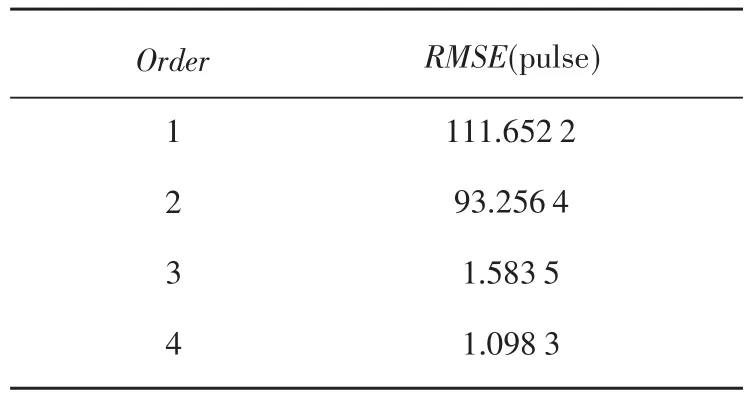
表1 四個(gè)階次模型的RMSE
3 基于參數(shù)優(yōu)化的自整定方法
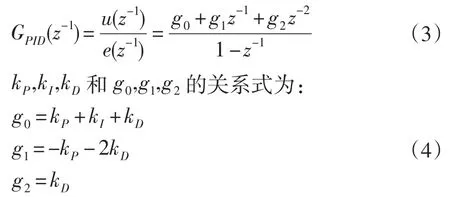
3.1PID控制器的結(jié)構(gòu)
使用增量式PID控制算法[7],可得:
基于上一節(jié)建模結(jié)果,位置環(huán)的結(jié)構(gòu)框圖如圖4所示。

圖4 位置環(huán)的結(jié)構(gòu)框圖
3.2PID控制器參數(shù)自整定機(jī)制
接下來基于單純形法對(duì)控制器進(jìn)行參數(shù)尋優(yōu)。Gp(z-1)為被控對(duì)象的傳遞函數(shù),GPID(z-1)為控制器的傳遞函數(shù),根據(jù)二者可以得到跟蹤誤差e(k)的離散公式:
y(k)=GPID(k)Gp(k)e(k-1)
e(k)=r(k)-y(k)(5)
r(k)是輸入,為階躍信號(hào)。
系統(tǒng)在參數(shù)尋優(yōu)過程中,將描述優(yōu)化準(zhǔn)則的目標(biāo)函數(shù)設(shè)為F(m),即:

F(m)與跟蹤誤差相關(guān),式中,m為三維空間里的坐標(biāo),kP,kI,kD的數(shù)值為m的坐標(biāo)值,L是r(k)的數(shù)據(jù)長(zhǎng)度,f(e(k))為控制器跟蹤誤差的函數(shù)。
PID參數(shù)的自整定即對(duì)kP,kI,kD的參數(shù)值進(jìn)行優(yōu)化,因此,滿足系統(tǒng)性能的PID值即是優(yōu)化后的最終結(jié)果,那么,PID參數(shù)自整定的問題可寫為下式:

在該優(yōu)化問題中,PID參數(shù)值的選擇要滿足系統(tǒng)穩(wěn)定的條件范圍,這個(gè)范圍稱為可行域Q:
kP,kI,kD∈Q(8)
PID參數(shù)的尋優(yōu)機(jī)制如圖5所示:
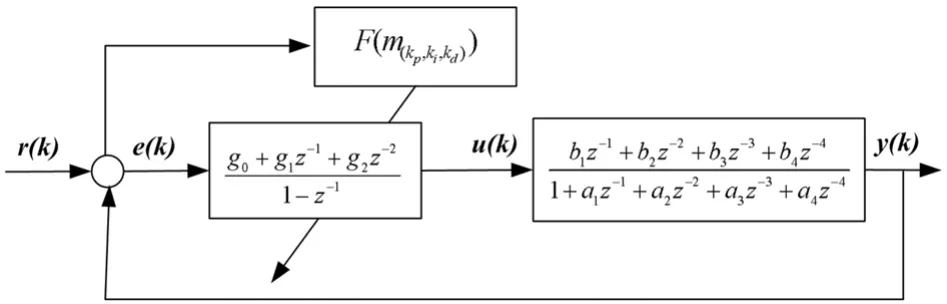
圖5 PID參數(shù)的尋優(yōu)機(jī)制
PID尋優(yōu)流程如圖6所示,PID控制器參數(shù)的自整定流程圖如圖7所示。
4 優(yōu)化準(zhǔn)則
優(yōu)化準(zhǔn)則的選取在PID參數(shù)自整定的過程中尤為重要,我們選用常用的幾種方法對(duì)運(yùn)動(dòng)控制實(shí)驗(yàn)平臺(tái)進(jìn)行參數(shù)優(yōu)化并作分析,找到能夠描述系統(tǒng)性能指標(biāo)狀態(tài)的最佳優(yōu)化準(zhǔn)則。
(1)誤差平方的積分準(zhǔn)則(ISE):
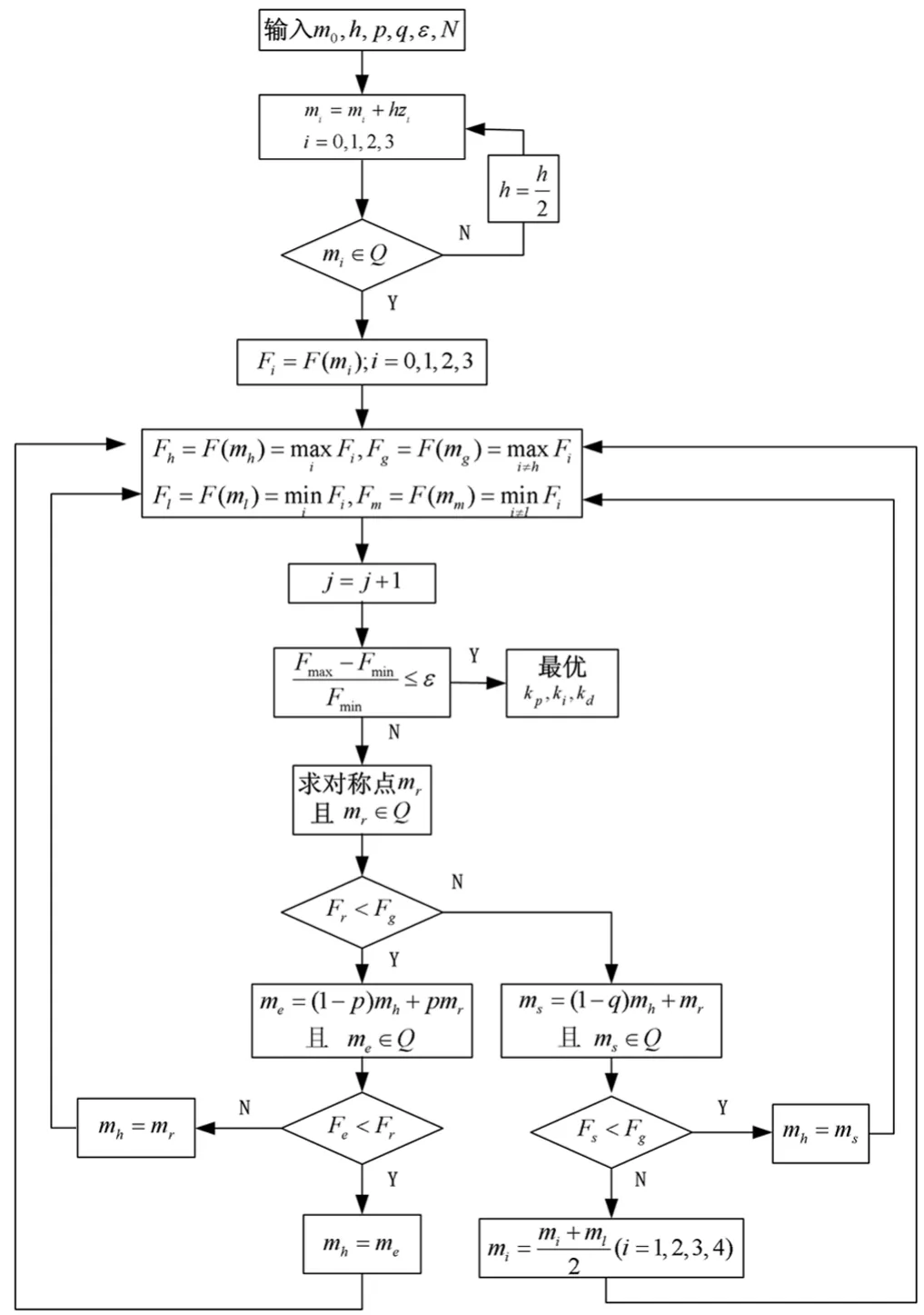
圖6 尋優(yōu)算法的流程圖
系統(tǒng)在ISE準(zhǔn)則下優(yōu)化PID的階躍響應(yīng)如圖8所示。從曲線中可以看到系統(tǒng)存在很大的超調(diào)。
(2)誤差平方的矩的積分準(zhǔn)則(ITSE):
系統(tǒng)在ITSE準(zhǔn)則下優(yōu)化PID的階躍響應(yīng)如圖9所示。可見,超調(diào)明顯減小,調(diào)整時(shí)間也明顯降低。
(3)誤差絕對(duì)值的矩積分準(zhǔn)則(ITAE):
系統(tǒng)在ITAE準(zhǔn)則下優(yōu)化PID的階躍如圖10所示。通過對(duì)比,ITAE準(zhǔn)則下,調(diào)整時(shí)間進(jìn)一步縮短,系統(tǒng)超調(diào)小、快速性好、平穩(wěn)性提高。
(4)廣義平方誤差積分準(zhǔn)則(GISE):
系統(tǒng)在GISE準(zhǔn)則下優(yōu)化PID的階躍響應(yīng)如圖11所示,系統(tǒng)沒有超調(diào)。
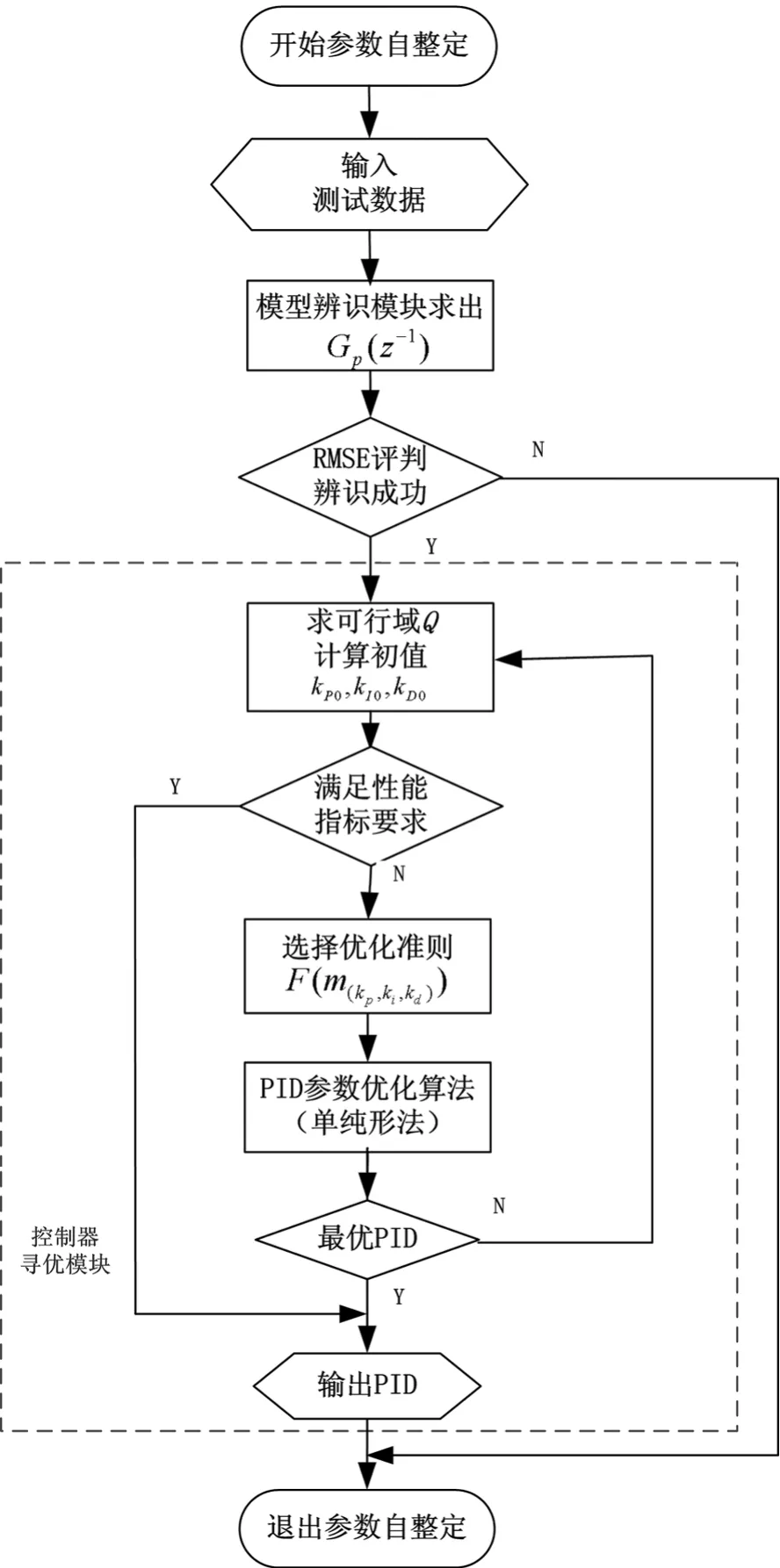
圖7 參數(shù)優(yōu)化自整定的流程圖
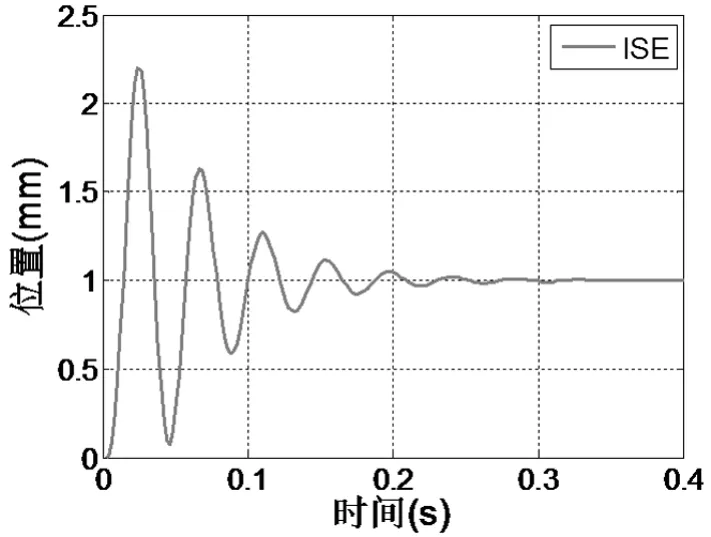
圖8 基于ISE準(zhǔn)則的階躍響應(yīng)
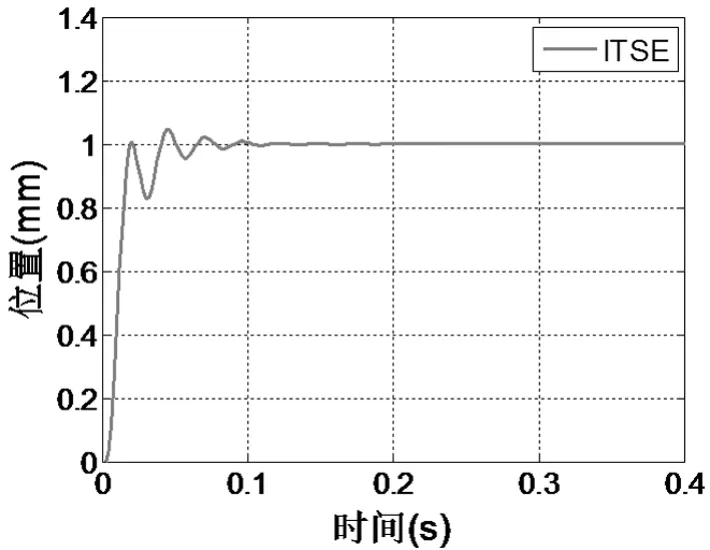
圖9 基于ITSE的階躍響應(yīng)
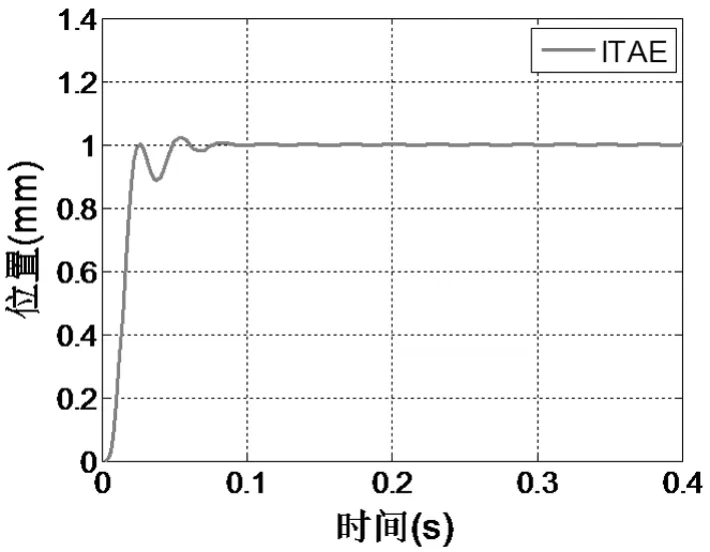
圖10 基于ITAE的階躍響應(yīng)
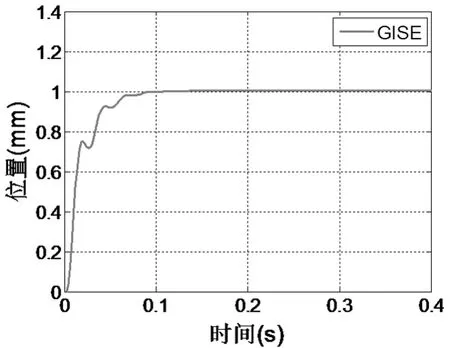
圖11 基于GISE的階躍響應(yīng)
(5)基于時(shí)間的廣義誤差積分準(zhǔn)則:
系統(tǒng)在GITSE準(zhǔn)則下優(yōu)化PID的階躍響應(yīng)如圖12所示。GITSE準(zhǔn)則相比GISE準(zhǔn)則,將時(shí)間的權(quán)重考慮進(jìn)去,提高了系統(tǒng)的響應(yīng)速度,同時(shí)縮小了系統(tǒng)的穩(wěn)態(tài)誤差。
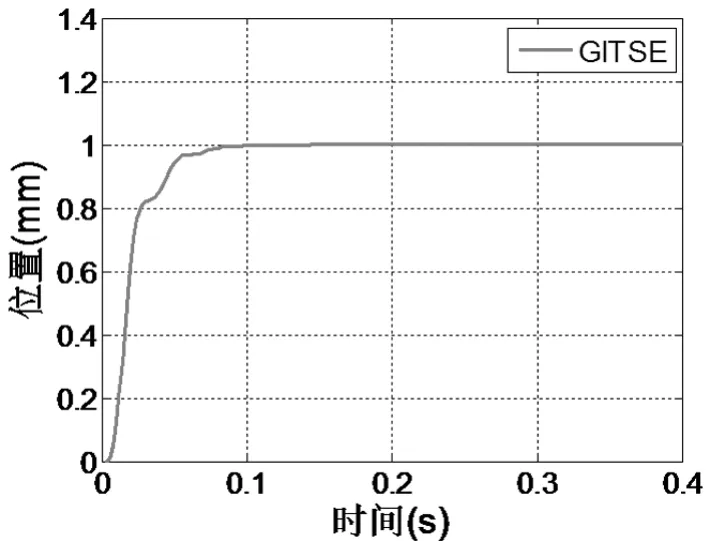
圖12 基于GITSE的階躍響應(yīng)
將優(yōu)化結(jié)果進(jìn)行對(duì)比,見表2所示。Td為延遲時(shí)間、ts為調(diào)整時(shí)間、tp為峰值時(shí)間,tr為上升時(shí)間,σ%為超調(diào)量,N為振蕩次數(shù)。
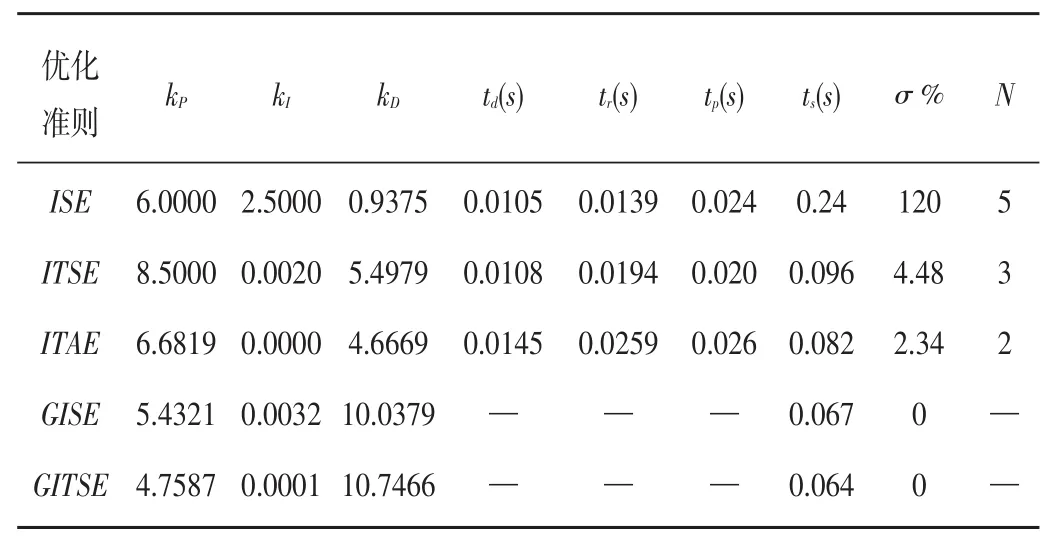
表2 優(yōu)化結(jié)果對(duì)比
系統(tǒng)的快速性可以從td、ts、tp和tr來分析,系統(tǒng)的平穩(wěn)性從σ%和N來分析。ISE由于ts長(zhǎng)同時(shí)σ%大而不被采用。ITSE的tr較短,σ%適中,在平穩(wěn)性一般但快速性高的系統(tǒng)中可以采用。ITAE的振蕩次數(shù)少,σ%小,ts適中,在對(duì)平穩(wěn)性能和快速性能都有要求的系統(tǒng)中可以采用。GISE和GITSE以其ts最短并且無超調(diào)的特點(diǎn),在平穩(wěn)性能和快速性能要求都很高的系統(tǒng)中可以采用。
5 實(shí)驗(yàn)
選取一臺(tái)小型的三軸雕銑機(jī)床作為實(shí)驗(yàn)平臺(tái),將自整定算法在實(shí)際機(jī)床上進(jìn)行驗(yàn)證。基于GITSE優(yōu)化準(zhǔn)則的進(jìn)行尋優(yōu)與手調(diào)PID結(jié)果進(jìn)行對(duì)比,如表3所示。
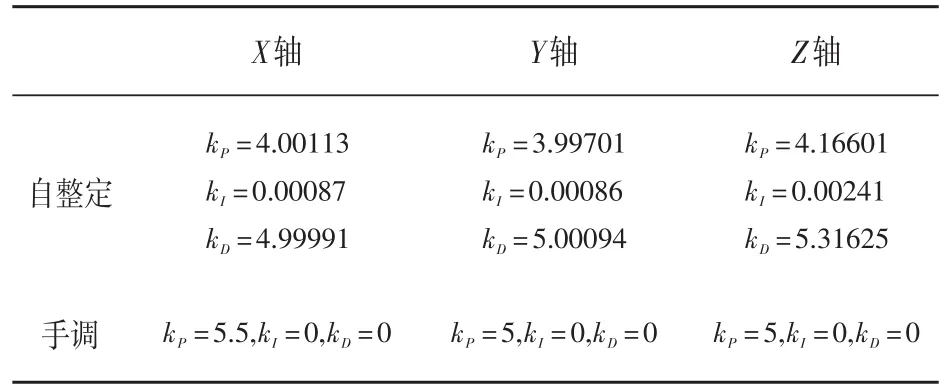
表3 三軸雕銑機(jī)床的PID參數(shù)
圖13為傳統(tǒng)手調(diào)方法和PID自整定方法的加工對(duì)比,加工實(shí)驗(yàn)均為曲面加工,加工速度均為每分鐘兩米。從中可以看出,加工效果在曲率小的時(shí)候差別并不明顯,而在曲面的曲率較大的地方,自整定要比手調(diào)效果好很多,另外,在時(shí)間上,自整定算法加工的時(shí)間要比人工手調(diào)方法的加工時(shí)間少很多。
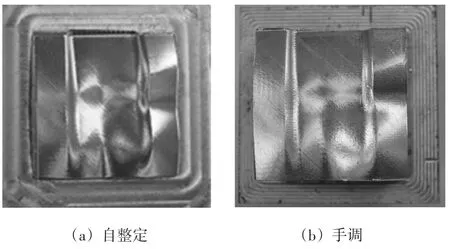
圖13 自整定PID與手調(diào)PID的加工結(jié)果對(duì)比
6 結(jié)論
本文針對(duì)數(shù)控機(jī)床控制系統(tǒng)位置環(huán)設(shè)計(jì)了一種PID控制器自整定方法。通過RMSE評(píng)價(jià)機(jī)制得到數(shù)控機(jī)床位置環(huán)模型,基于GITSE優(yōu)化準(zhǔn)則并采用單純形法進(jìn)行了參數(shù)尋優(yōu)。實(shí)驗(yàn)證明,該P(yáng)ID自整定機(jī)制可以取代傳統(tǒng)的人工手調(diào),在數(shù)控系統(tǒng)的生產(chǎn)加工中得到應(yīng)用。
參考文獻(xiàn):
[1]吳黎明.數(shù)字控制技術(shù)[M].北京:科學(xué)出版社,2009.
[2]劉震,姜學(xué)智,李東海.PID控制器參數(shù)整定方法綜述[J].電力系統(tǒng)自動(dòng)化,1997,21(8):79-83.
[3]Eric P,Andre P.Development and Evaluation of an Au?to-tuning and Adaptive PID Controller[J].Automati?ca,1996,32(1):71-82.
[4]Dwyer A O.Handbook of PI and PID Controller Tuning Rules[M].London:Imperial College Press,2009:44-51.
[5]Wilson D I.Optimal Control[M].Sweden:Karlstad University Press,2000:56-67.
[6]M.C.Tsai,I.F.Chiu,M.Y.Cheng.Design and Imple?mentation of Command and Friction Feed-forward Con?trol for CNC Motion Controllers[J].IEE Proceedings Control Theory Applications,2004,151(1):13-20.
[7]陶永華.新型PID控制及其應(yīng)用[M].北京:機(jī)械工業(yè)出版社,2002.
(編輯:向飛)
Study of PID Self-Tuning Method in CNC Control
FU Lan-hui1,ZHOU Lei2,CAO Yong-jun2
(1.Fangyuan NC Tech.Co.,Ltd.,Shenzhen518055,China;2.Guangdong Institute of Automation,Guangzhou510000,China)
Abstract:CNC system is the core of the modern industry.In this paper,we proposed a self-tuning method of PID controller in CNC control system.The position loop is modeled and analyzed with RMSE evaluation mechanism.Based on simplex method,use parameter optimization and identification to establish the self-tuning method.Find out the optimal criteria for different performance requirements by discussing how to choose the optimal criteria.The experiments provide that the self-tuning method can be applied to the processing and production of CNC.
Key words:CNC;system identification;simplex method;self-tuning;PID controller
作者簡(jiǎn)介:第一付蘭慧,女,1987年生,河南人,碩士研究生,工程師。研究領(lǐng)域:運(yùn)動(dòng)控制。已發(fā)表論文2篇。
收稿日期:2015-07-28
DOI:10.3969/j.issn.1009-9492.2015.08.024
中圖分類號(hào):TG659
文獻(xiàn)標(biāo)識(shí)碼:B
文章編號(hào):1009-9492 (2015 ) 08-0087-05