淺談GPS測量的誤差來源與減弱措施
2015-04-16 05:00:02魏天福
科技視界 2015年2期
魏天福
(蘭州資源環境職業技術學院,甘肅 蘭州 730021)
1 誤差的分類
按照GPS測量中誤差的來源劃分,可將誤差源分為以下幾類:
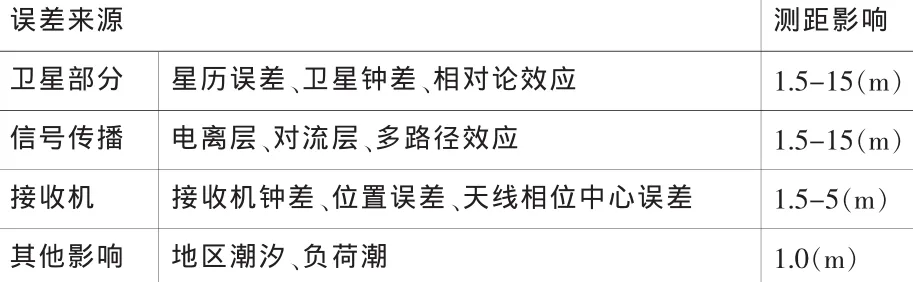
表1
按照誤差對測量結果影響的性質,可以分為偶然誤差和系統誤差。其中系統誤差包括:星歷誤差、衛星鐘差、接收機鐘差、相對論效應、天線相位中心誤差和相對論效應等;偶然誤差包括多路徑效應、地區潮汐和負荷潮等。其中系統誤差是GPS測量的主要誤差來源。
2 誤差的消除或減弱
2.1 來自衛星的誤差
2.1.1 星歷誤差
星歷是用來計算任意時刻衛星位置的參數,根據其精度可分為廣播星歷和精密星歷。因星歷誤差而引起的定位誤差可達數米、數十米甚至上百米。
減弱的方法:
1)建立自己的衛星定位跟蹤網獨立定軌:通過獨立定軌可獲得優于10-7的精度,目前精密定位定軌主要采用此方法。
2)軌道松弛法:將衛星給出的星歷參數作為初始值,視其改正數為未知數采用平差的方法獲得星歷改正數。此方法適合在無法獲得精密星歷時使用。
3)同步觀測值求差:利用兩個或以上的測站對同一顆衛星的同步觀測值求差可以減弱星歷誤差的影響,因此在相對定位中能獲得較好的定位精度。
2.1.2 衛星鐘差
在GPS測量中無論是碼相位觀測還是載波相位觀測,均要求衛星鐘和接收機鐘嚴格同步。時間偏差在1ms以內時,引起的等效距離誤差可達300km。
衛星鐘差一般可采用多項式擬合的方法獲得,一般采用二階多項式的形式:
式中t0為參考歷元,a0、a1、a2分別表示在t0時刻的鐘差、鐘速及鐘速變率。經過上述改正后各衛星鐘的同步差可保持在20ns之內,引起的等效距離誤差不超過6m。
2.1.3 相對論效應
相對論效應是由于衛星鐘和接收機鐘所處的速度和重力位不同而產生的二者之間鐘差不同步的影響。從廣義與狹義相對論出發,相對論效應在衛星與接收機之間產生的鐘頻率之差:
其中f為衛星標準頻率10.23MHz。
減弱措施是在制造衛星時,人為將GPS衛星基準頻率降低為10.23MHz×(1-4.449×10-10)=10.22999999545 MHz。 這些衛星進入預定軌道受相對論效應影響后的頻率正好變為10.23MHz。
2.2 信號傳播中的誤差
信號傳播中的誤差主要包括電離層折射、對流層折射和多路徑效應誤差等。
2.2.1 電離層折射影響
GPS信號通過電離層時由于傳播路徑發生彎曲和傳播速度發生變化,導致所計算的距離不等于站星間的幾何距離。影響的大小取決于信號頻率和傳播路徑上的電子總量。這種距離誤差在天頂方向可達50m,在高度角為20°時可達150m。
減弱的措施:
1)利用雙頻觀測:電離層影響是信號頻率的函數,利用不同頻率電磁波信號進行觀測可確定其影響大小,并對觀測量加以修正。其有效性不低于95%。
2)利用電離層模型加以修正:對于單頻接收機,一般采用由導航電文提供的或其它適宜電離層模型對觀測量進行改正。目前模型改正的有效性約為75%。
3)同步觀測值求差:當觀測站間的距離較近(小于20km)時衛星信號到達不同觀測站的路徑相近,通過同步求差殘差不超過10-6。
2.2.2 對流層折射誤差
對流層是指從地面向上約40km范圍內的大氣底層,占整個大氣質量的99%。該層中除含有各種氣體元素外,還含水滴、冰晶和塵埃等雜質,對電磁波的傳播有很大影響。對流層折射對觀測量的影響可分為干分量和濕分量兩部分。干分量主要與大氣溫度和壓力有關,而濕分量主要與信號傳播路徑上的大氣濕度和高度有關。定位精度要求不高時可忽略不計。
對流層影響減弱措施:
1)采用對流層模型加以改正。但難以將對流層影響減小到92%至95%。一般采用霍普菲爾德模型:
式中E為衛星高度角,ΔS為折射改正數,單位為m。其余變量所示含義如下:
hd為對流層外緣高度(m),hw為高程平均值(m)。
2)引入描述對流層的附加待估參數,在數據處理中求解。
3)觀測量求差。當兩觀測站相距不太遠時(小于20km時),由于信號通過對流層的路徑相似,所以對同一顆衛星間同步觀測值求差可以明顯減弱對流層折射的影響。這一方法在精密相對定位中被廣泛使用。
2.2.3 多路徑效應誤差
接收機除直接收到衛星發射的信號外,還可能收到經周圍地物一次或多次反射的衛星信號。兩種信號迭加將引起測量參考點位置變化,使觀測產生誤差。在一般反射環境下,對測碼偽距的影響達米級,對測相偽距影響達厘米級。在高反射環境中,影響顯著增大,且常常導致衛星失鎖和產生周跳。
減弱措施:
1)安置接收機天線的環境應避開較強發射面如水面、平坦光滑的地面和建筑表面。
2)選擇造型適宜且屏蔽良好的天線如扼流圈天線。
3)適當延長觀測時間削弱周期性影響。
4)改善接收機的電路設計。
2.3 接收機誤差
與接收機有關的誤差主要包括接收機鐘誤差、接收機位置誤差和天線相位中心偏差誤差。
2.3.1 接收機鐘誤差
GPS接收機一般采用高精度的石英鐘,其穩定度為10-9。若接收機鐘與衛星鐘間同步差為1μs,則引起的等效距離誤差為300m。
減弱措施:
1)把每個觀測時刻的接收機鐘差當做一個獨立未知數,在數據處理時與測站位置一并求解。
2)認為各觀測時刻的接收機鐘差間是相關的,將接收機鐘差表示為時間的多項式,并在觀測量的平差計算中求解多項式系數進而求得鐘差改正數。
3)通過在衛星間求一次差來消除接收機的鐘差。
2.3.2 接收機位置誤差
接收機天線相位中心相對于測站標石中心位置的誤差稱之為位置誤差。這里包括天線的置平和對中誤差,量取天線高的誤差。當天線高度為1.6m,整平誤差為0.1°時可能會產生對中誤差3mm。
在實際觀測中可采用具有強制對中裝置的觀測墩,使對中誤差優于1mm。
2.3.3 天線相位中心位置誤差
GPS測量中觀測值都是以接收機天線相位中心位置為準的,天線相位中心與其幾何中心的位置應保持一致。由于實際的信號輸入強度和方向不同導致實際相位中心與理論相位中心產生位置偏差,其偏差可達數毫米至數厘米之間。
實際工作中應使用同一類型的天線進行相對定位觀測,并利用同步觀測值求差來減弱相位中心偏差影響。相對定位觀測時,天線位置應根據天線附有的方位標進行定向,定向的偏差不超過3°。同時方位應保持不變。
3 結論
鑒于以上GPS測量的誤差來源,在實際觀測作業中應采用相對定位或差分測量的形式減小誤差影響,必要時采用精密星歷定位。與此同時除了選擇性能優異的GPS接收機和相關的后處理軟件以外,還應該選擇合理的觀測站點和觀測時間,做好外業觀測設計以求減弱GPS測量的誤差。
[1]徐紹銓,張華海,楊志強,王澤民.GPS測量原理及應用[M].武漢大學出版社,2007,12.
[2]劉大杰,施一民,過靜珺.全球定位系統(GPS)原理與數據處理[M].同濟大學出版社,2007,3.
[3]魏子卿,葛茂榮.GPS相對定位的數學模型[M].測繪出版社,1998.
[4]陳芳,高永梅,徐良驥,張玉.GPS測量誤差中關于對流層延遲的探討[J].西部探礦工程,2005(106).
[5]過靜珺,等.多路徑效應對GPS定位影響的研究[J].工程勘查,1995(2).
[6]李成鋼,黃丁發,袁林果,周樂韜,徐銳.GPS參考站網絡的電離層延遲建模技術[J].西南交通大學學報,2005,40(5).
[7]王解先.GPS精密定軌定位[M].同濟大學出版社,1997.
[8]王曉強.GPS測量中多路徑誤差的影響[J].地殼形變與地震,2000,20,(1).
[9]謝世杰,潘寶玉.GPS 測量的對流層誤差[J].地礦工程.2004,20(2):1-3.
[10]鐘萍,等.CVVF方法用于GPS多路徑效應的研究[J].測繪學報,2005,34(2).
猜你喜歡
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
當代陜西(2021年2期)2021-03-29 07:41:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
媽媽寶寶(2017年3期)2017-02-21 01:22:28
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(2016年3期)2016-03-26 07:13:38
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
