機動車行車事故自動報警系統的設計
2015-04-18 11:19:06田帥帥黃科東
科技視界 2015年14期
田帥帥 邵 釩 劉 雷 黃科東
(中國民航大學電子信息工程學院,中國 天津300300)
0 引言
自20世紀90年代以來,全世界每年死于道路交通事故的人數基本保持在50萬人左右。我國自2000年以來,每年死于交通事故的人數都在10萬人左右,致死率達17%左右,但其中有相當一部分傷亡人數是由于救援不及時造成的。法國的實踐表明,對于交通事故重傷者,在30分鐘內獲救,其生存率為80%,在90分鐘內獲救,其生存率僅為10%以下。根據上述數據可看出,獲得及時救援可大大提高當事人的生存率。鑒于此,本文提出一種機動車行車事故自動報警系統的設計方法,以使系統可根據車輛的姿態信息及時判斷車禍是否發生,并在判斷車禍發生時告警達到及時救援的目的。
1 系統設計原理

圖1 系統框圖
此系統的組成包括MSP430單片機,GPS接收機,GSM通信模塊以及加速度計、陀螺儀,磁力計等傳感器模塊。GPS接收機以固定的時間間隔接收來自衛星的定位信息,并將此信息通過UART串口發送給單片機,單片機將此信息寫入FLASH作以儲存,同時在間隔時間內,各傳感器模塊會采集車輛的姿態信息(加速度,傾斜角度,角速度等),并通過I2C協議將采集數據發送給單片機,單片機進行數據分析后判斷車禍是否發生,并在判斷車禍發生時將儲存的定位信息通過GSM模塊發送給指定聯系人,然后報警,以確保受害者在事故發生后可以獲得及時救援。
2 車禍判斷原理
根據國家標準《GB 11551-2014汽車正面碰撞的乘員保護》,汽車碰撞的實驗條件是:碰撞瞬間,車輛速度為50km/h(可更高)。亦及符合本標準設計的車輛在50km/h的速度下發生正面碰撞時基本不足以造成生命危險,而速度更高時可能發生產生嚴重傷害。故將以50km/h的速度發生碰撞的情況作為判斷閾值。
根據公式 a=dv/dt,取 v0=50km/h,vt=0,碰撞時間為 90ms,則得在勻速碰撞過程中a=15.4g(g=10m/s2),同理,若選取v0=60km/h,形變時間t=80ms,則 a=20.8g,選取 v0=70km/h,t=70ms 則 a=27.8g。 根據上述計算,可認為車輛加速度在達到15g時可判斷為發生嚴重碰撞事故,需要得到及時救援,故在系統中可設定15g為判斷閾值,當系統測量加速度值大于15g時及觸發報警。
3 系統硬件
3.1 GSM通信模塊
GSM(全球移動通信系統)是一種廣泛應用于世界各地的數字移動電話系統。本系統中GSM采用的是華為GTM900-C模塊,其支持標準AT指令和增強的AT指令,支持短消息和語音業務,可在-20℃—+70℃的范圍內正常工作,功耗低,滿足系統工作要求。同時,本模塊可以通過UART接口與外界通信,并支持3.0V電平的輸入輸出,使得其可以更方便的與MSP430系列的單片機完成通信。
3.2 GPS衛星模塊
GPS是英文Global Positioning System(全球定位系統)的簡稱,是一種具有全方位、全天候、全時段、高精度的衛星導航系統。本系統中采用和芯星通UM220模塊,其功耗典型值為350mw,可在-40℃—+85℃范圍內正常工作,定位精度可達10m以內,并可根據需要設置其數據更新率、接收數據類型和啟動類型,滿足系統需求。同時本模塊也可直接通過UART接口與外界設備通信,簡化系統硬件結構設計。
3.3 陀螺儀和磁力計
陀螺儀通過測量三維坐標系內陀螺轉子的垂直軸與設備之間的夾角,并計算角速度,通過夾角和角速度來判別物體在三維空間的運動狀態。本系統中采用MPU6050模塊,其內部集成了陀螺儀和加速度計,可通過I2C協議直接從模塊讀取測量值。
磁力計可用于測試磁場強度和方向,定位設備的方位,磁力計的原理跟指南針原理類似,可以測量出當前設備與東南西北四個方向上的夾角,此處選用HMC5883L,其內部包含三軸磁阻傳感器,也可以通過I2C協議讀取測量數據。
4 系統軟件設計
4.1 系統軟件流程圖

圖2 系統流程圖
此系統的軟件功能主要為:①完成系統初始化;②實現GPS有效定位及GSM網絡注冊;③采集車輛姿態信息數據;④數據處理;⑤發送短信及撥打電話。
4.2 GPS實現車輛定位
GPS接收信號 NMEA-0183 Ver3.0協議的輸出信息有GGA,GSA,GLL等多種類型,本程序選擇接收GGA,GSV,RMC三種類型的信息,此三種模式下的輸出信息中包含定位有效性標識,經緯度,日期,時間以及其他豐富信息,可以完全滿足系統定位需求。
此處選取RMC的輸出信息類型做以說明:RMC消息格式:
$--RMC,time,status,Lat,N,Lon,E,spd,cog,date,mv,mvE,mode*cs;程序中依據“RMC”字符串判斷出信息類型,依據‘,’字符的數目判斷接收的內容,例:判斷接收到3個‘,’,則接下來在下一個‘,’之前接收信息為緯度,依據緯度格式:ddmm.mmmmmm,dd-度,mm.mmmmmm-分,提取出緯度值。按照上述方法,則可正確提取有效信息,但值得注意的是此處接收為UTC時間,與北京時間相差8小時,需進行轉換。
4.3 車輛姿態信息采集
車輛姿態信息的采集是通過陀螺儀,加速度計及磁力計完成的。本系統中采用的MPU6050其內置有陀螺儀和加速度器,可以直接獲取加速度和角速度,經過數據處理消除零漂及誤差后可以得到準確的加速度與角速度,之后配合磁力計經由四元數和歐拉角公式的融合演算,可以計算得出此時車輛的角度信息。
4.4 車禍判斷方法
程序中采用加速度,角速度及角度的聯合判斷,達到在多種情況下判斷車禍發生的目的。傳感器將采集的加速度,角速度傳輸到單片機中后,單片機先行判斷加速度值,當超過設定值(15g)后確定車禍已發生,若加速度達不到設定值則繼續判斷角速度,在車輛發生甩尾或者翻滾的情況下會造成角速度過大,然而,顛簸也會造成角速度過大,所以此時需要配合角度大小的判斷才能避免誤判。按照車輛行駛的正常狀態,我們選取30°作為角度判斷的閾值。通過加速度,角速度,角度的聯合判斷,可以在撞車,翻車等多種意外情況中及時正確的判斷車禍發生。
4.5 通過GSM網絡編輯,發送短消息
在判斷車禍發生后需要將受害者的位置信息發送給指定聯系人,通過GSM網絡發送短信息之前要先進行初始化與網絡注冊。本程序中,通過AT指令“AT+CMGF=1”設置短信為文本方式,通過AT指令“AT+CREG?”查詢網絡注冊狀況,當網絡注冊成功時即可通過GSM網絡發送短消息。單片機從FALSH中讀取存儲的定位信息,經處理后形成包含經緯度和時間信息內容的短消息字符串,之后通過UART串口經GSM模塊發送給指定聯系人。
5 系統測試
5.1 利用加速度判斷車禍方法的測試
為了驗證系統性能,采用系統在滑軌上運動來產生勻加速運動的方法,并利用紅外對管標定加速度的方法計算實際加速度大小,通過實際加速度的測量來驗證系統采集加速度的準確性,并證明系統在達到加速度閾值時觸發報警的可運行性。由于設備有限,本次只進行了0~1g的小加速度范圍內的試驗。

圖3 測試結構圖
如圖所示,系統在重物牽引下沿滑軌勻加速運行,圖中的紅外對管陣列與單片機相連接,利用單片機的外部中斷與定時器可方便得到系統在通過每一對紅外對管的時間。在某次試驗中得到如下數據:

表1 系統加速度告警測試表
由于A點為起始點,可認為此時的速度為0,利用公式h=at2/2可以求得此時的加速度值,分別為:0.9g,0.91g,0.93g。 由于時間是 ms級的,故微小的時間差會帶來加速度的較大區別,此組數據在可接受的變化范圍內,因此可認為此次試驗下系統的加速度值在0.85g~0.95g的范圍內。本次試驗中,分別將加速度閾值設定在0.6g和1g的情況下進行試驗,可看出加速度閾值為0.6g時觸發報警,而設定為1g時未觸發,說明系統可以正確采集加速度,并在加速度達到閾值時準確報警。
5.2 利用角度判斷車禍方法的測試
測試時,系統固定在滑軌上,通過將滑軌前后左右傾斜來模擬車輛翻車的情況,利用角度測量儀測量系統實際傾角,將其與系統測量角度相比較,以確定系統角度測量的準確性及在達到觸發閾值時觸發報警的可靠性。此處選取一次測量結果作以說明,閾值設定為30°:
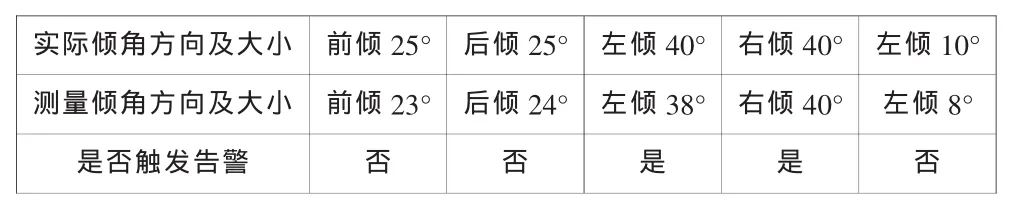
表2 系統角度告警測試表
由上述數據可以看出在誤差允許范圍內本系統可以正確測量角度,并依據閾值做出正確的觸發告警判斷。
6 結語
在汽車工業高速發展的今天,開車出行成為人們的主流選擇。然而,行車事故的頻頻發生,又行車安全成為威脅人們生命財產安全的主要因素。本文提出的行車事故自動報警系統旨在車禍發生時,幫助受害者獲得最及時的救援,在最大程度上減少事故傷亡率。相信隨著這種系統的推廣,可以給汽車行業帶來更大的安全保障。
[1]洪利,章楊,李世寶.MSP430 單片機原理與應用實例[M].北京:北京航空航天大學出版社,2010,7.
[2]陳文輝,鄭晟,李武杰.基于加速度的車禍報警系統的設計與實現[J].電子設計工程,2011,4.
[3]吳鐵軍,馬龍華,李宗濤.應用捷聯慣導系統分析[M].北京:國防工業出版社,2011,6,1.
[4]GB 11551-2014 汽車正面碰撞的乘員保護[S].2014,9,3.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
電子設計工程(2015年15期)2015-02-27 12:07:30
中外會展(2014年4期)2014-11-27 07:46:46