基于模糊自適應PID控制器的空氣懸架控制策略研究*
2015-04-18 08:02:30詹長書孫世磊
武漢理工大學學報(交通科學與工程版) 2015年5期
關鍵詞:模型
詹長書 程 崇 孫世磊
(東北林業大學交通學院 哈爾濱 150040)
0 引 言
隨著汽車行業快速發展,空氣懸架在高檔轎車上已經逐步開始應用.空氣懸架是車輛的重要組成部分,空氣懸架對汽車的安全性、穩定性、舒適性有重要影響.空氣懸架可以通過控制器控制算法的改變而改變懸架的控制力,從而控制車輛的車身加速度、懸架動行程、輪胎動載荷,因此空氣懸架的控制策略對空氣懸架有重要意義.
模糊控制是現代智能控制重要分支之一,控制過程中包含了以往的控制經驗,具有適應能力強,抗干擾能力強的特點,特別適用于時變性、非線性的控制系統中[1].傳統的PID參數經過確定就不能再調節,所以在一些控制系統中不能取得滿意的效果[2].針對2種控制器不同的控制特點,把2種控制器結合為模糊自適應PID控制器對空氣懸架進行仿真分析.
1 空氣懸架模型的建立
1.1 空氣彈簧模型
以主副氣室一體式空氣彈簧為研究對象,主氣室和副氣室內的氣體狀態方程為

式中:p為氣體的壓強,Pa;V 為氣體的容積,m3;m為氣體的質量,kg;R為氣體常數,對空氣R=287N·m/(kg·K);T為氣體的溫度,K.
主副氣室的氣體通過節流口進行流動,主副氣室中壓強較小氣室的壓強除以壓強較大氣室的壓強≥b時,氣流的質量流量不變且穩定;當<b時,氣流質量流量與主氣室和副氣室壓力比近似于1/4橢圓關系.b取0.528.
節流口氣體質量流量表達式為[3]
式中:q為氣體質量流量;Tmax為氣體溫度(壓力較大的氣室);k為絕熱系數,k=1.4;pmax=max{p1,p2};pmin=min{p1,p2};p1為主氣室壓強,p2為副氣室壓強;A為節流口有效面積(A=εA0,A0為節流口實際面積,ε為收縮系數).
空氣彈簧在工作過程中,主副氣室內的空氣總質量是不變的,但是如果只研究主氣室或副氣室,則其質量是變化的,根據熱力學和流體力學知識,氣體的質量變化率為


當節流口沒有完全關閉時,主副氣室是有氣體相互流通的,主氣室和副氣室的壓強分別為[4-5]
式中:m1為空氣懸架主氣室氣體的初始質量,kg;m2為空氣懸架副氣室氣體的初始質量,kg;p3為空氣懸架主氣室的初始壓強,Pa;p4為空氣懸架副氣室初始壓強,Pa;V1為主氣室的有效容積,m3;V2為副氣室的有效容積,m3;V3為主氣室的初始有效容積,m3;V4為副氣室的初始有效容積,m3;V1=V3+x;V2=V4·x;其中為主氣室有效容積變化率為副氣室有效容積變化率;x為主副氣室的高度變化量.
當空氣懸架的壓縮量大于0.03m時,節流口關閉,此時主氣室和副氣室無氣體流通,主副氣室的壓力可表示為
式中:V′3為節流口完全關閉時主氣室的有效容積,m3;V′4為節流口完全關閉時副氣室的有效容積,m3;p′3為節流口完全關閉時主氣室內的氣體壓強,Pa;p′4為節流口完全關閉時副氣室內的氣體壓強,Pa.
由式(5)、式(6)得到節流口未完全關閉時的空氣懸架彈簧力為

式中:p1和p2為式(5)、式(6)所表示的壓強.
由式(7)、式(8)得到節流口完全關閉時的空氣懸架彈簧力為

式中p1和p2為式(7)、式(8)所表示的壓強;式(9)、式(10)中的S1為空氣懸架主氣室的垂向有效承載面積,m2;S2為副氣室的垂向有效承載面積,m2.
1.2 單輪1/4車輛模型
文中建立了1/4空氣懸架車輛模型,空氣懸架是一個復雜的非線性系統,可以根據實際情況進行簡化[6].空氣彈簧的力學模型見圖1.
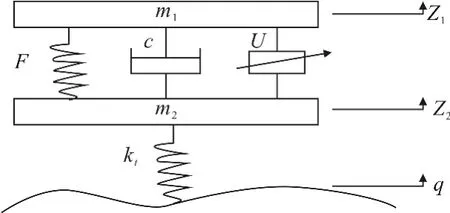
圖1 1/4空氣懸架車輛模型
空氣懸架的系統動力學方程為

式中:m1為簧上質量;m2為簧下質量;c為懸架阻尼系數;kt為輪胎剛度;z1為車身垂直位移;z2為車輪垂直位移;q為路面輸入位移;U系統主動控制力.懸架的模擬仿真參數見表1.
2 模糊自適應PID控制器的設計
模糊自適應PID控制器是針對空氣懸架運用模糊基本的理論,把規則、操作用模糊集表示,把這些模糊規則存入模糊控制器,然后計算機根據懸架的實際振動情況,根據模糊推理,可以自動對PID參數進行自適應調整[7],從而對懸架的振動進行調節.模糊自適應PID控制器的原理見圖2.
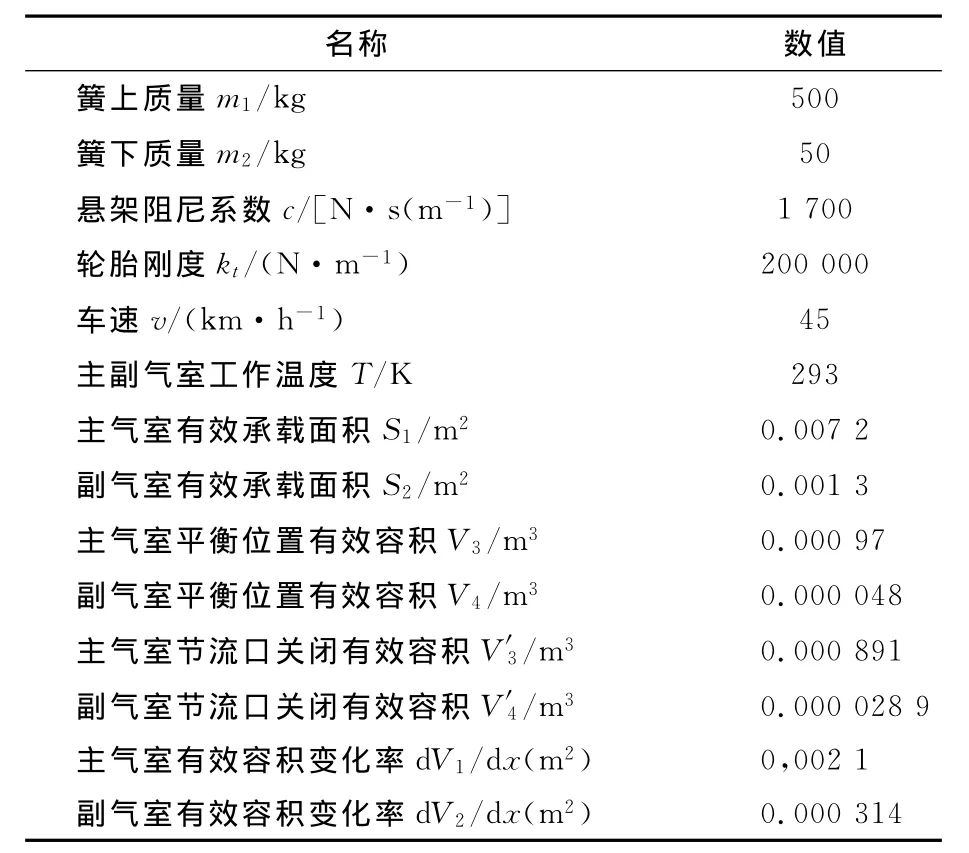
表1 懸架的模擬仿真參數

圖2 模糊自適應PID控制器原理框圖
2.1 PID控制器
PID控制器是一種線性控制器,它根據給定信號與實際輸出信號之間的偏差作為PID控制器的輸入量,并對偏差進行比例運算、積分運算和微分運算,三者的運算結果相加為控制器的
運算結果[8],PID控制器的算法表達如下

式中:k為采樣序號;Kp為比例系數;Ki為積分系數;Kd為微分系數.
PID控制器的參數對PID的控制效果有很大的影響,經過整定,得到比例系數Kp=10;積分系數Ki=6;微分系數Kd=1.5.
2.2 模糊控制器
模糊控制器是模仿人的推理和決策的一種智能控制器.模糊控制器包括輸入控制變量和輸出控制變量、隸屬度函數的類型、模糊控制規則和解模糊化[9-10].其中模糊控制規則是模糊控制器的關鍵部分,根據技術經驗和專家經驗進行整理,得到模糊控制規則.選取車身的垂向加速度e和車身垂向加速度變化率ec為輸入信號,輸出信號為PID控制器的3個系數ΔKp,ΔKi,ΔKd.
根據路面的激勵模型和車輛的速度,選取輸入的基本論域為[-1,1],[-10,10],Kp的基本論域為[-100,100],Ki的基本論域為[-60,60],Kd的基本論域為[-1 000,1 000],輸入輸出的模糊論域均為[-6,6].輸入量化因子Ke=6,Kec=0.6,輸出比例因子Up=16.67,Ui=10,Ud=166.67.輸入變量e,ec和輸出變量Kp,Ki,Kd的隸屬度函數均為三角形分布的隸屬度函數.
輸入輸出變量的模糊子集以如下方式劃分{負大,負中,負小,零,正小,正中,正大}={NB,NM,NS,ZO,PS,PM,PB},模糊規則表的建主要針對Kp,Ki,Kd3個參數的整定.表2~表4為3個參數的模糊規則表.
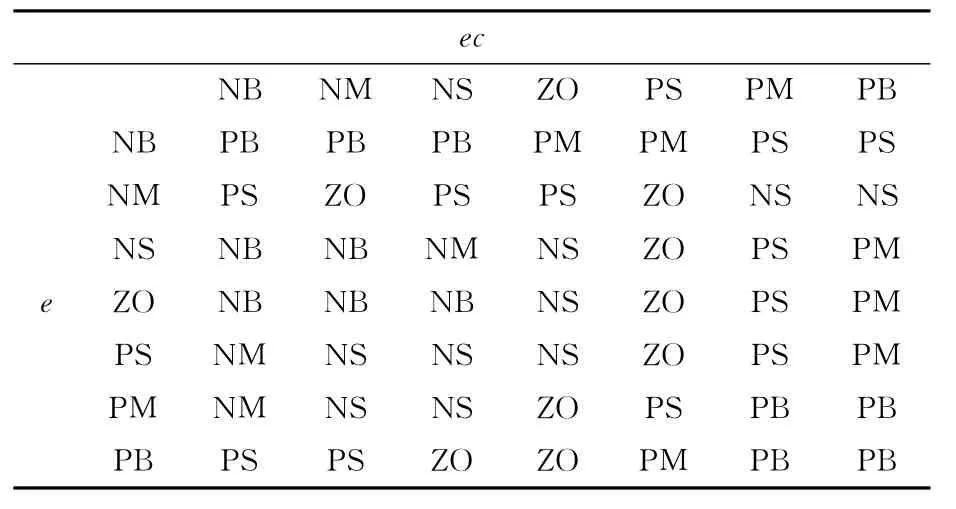
表2 ΔKp的模糊規則表
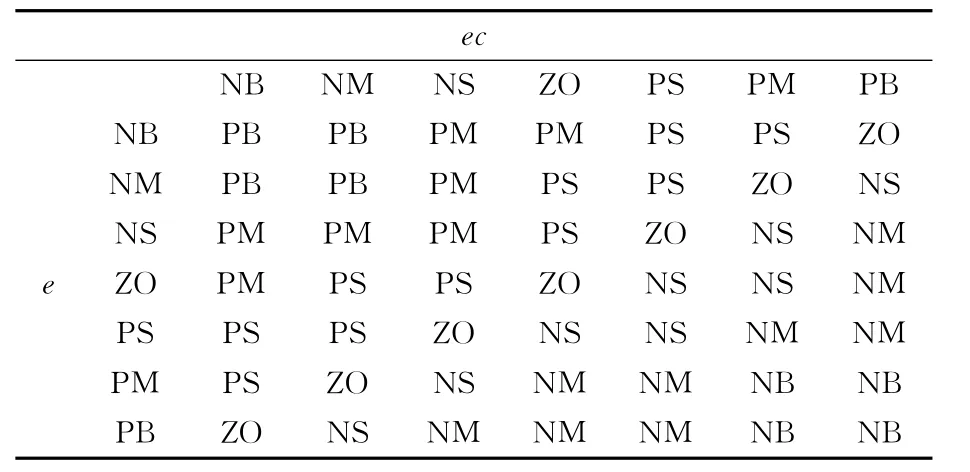
表3 ΔKi的模糊規則表

表4 ΔKd的模糊規則表
2.3 模糊自適應PID控制器模型
將模糊控制器與PID控制器結合起來得到的模糊自適應PID控制器模型.模糊自適應PID控制器的輸入為車身垂直加速度與固定值信號的偏差,模糊控制器的輸出 ΔKp,ΔKi,ΔKd,模糊PID控制器的輸出則為具體模型見圖3.
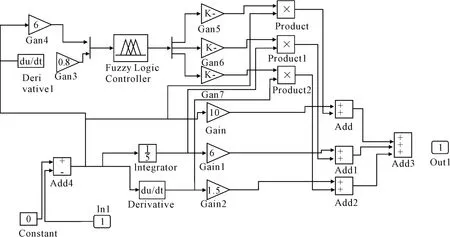
圖3 模糊自適應PID控制器仿真模型
3 仿真過程及結果分析
路面激勵模型采用濾波白噪聲模型[11],選取B級路面等級,車速選擇45km/h,仿真時間為30 s以保證結果穩定.分別仿真PID控制和模糊自適應PID控制空氣懸架的振動過程,對比2種控制的車身加速度、懸架動行程和輪胎動載荷的均方根值.具體見表5.

表5 平順性對比
根據對比分析,單一的PID控制能夠改善車身加速度和小幅度改善輪胎動載荷,但懸架動行程有所提高.模糊自適應PID控制器能夠有效改善車身加速度和輪胎動載荷,但懸架動行程也有所提高.但模糊自適應控制器對于車身加速度和輪胎動載荷的改善程度相對比較大,綜合比較模糊自適應PID控制器比單一的PID控制器的控制效果要更好.
為了比較模糊PID控制和被動控制的差異,繪制了懸架車身加速度、懸架動行程、輪胎動載荷對比曲線.見圖4~圖6.
4 結束語
建立了1/4空氣懸架模型,在B級路面上通過濾波白噪聲激勵,模糊自適應PID控制器能夠有效改善振動中的車身加速度和輪胎動載荷,但懸架動行程略有提高.與單一的PID控制相比車身加速度和輪胎動載荷改善明顯,懸架動行程略有提高.綜合比較模糊自適應PID控制器控制效果更佳.

圖4 車身加速度與時間仿真曲線
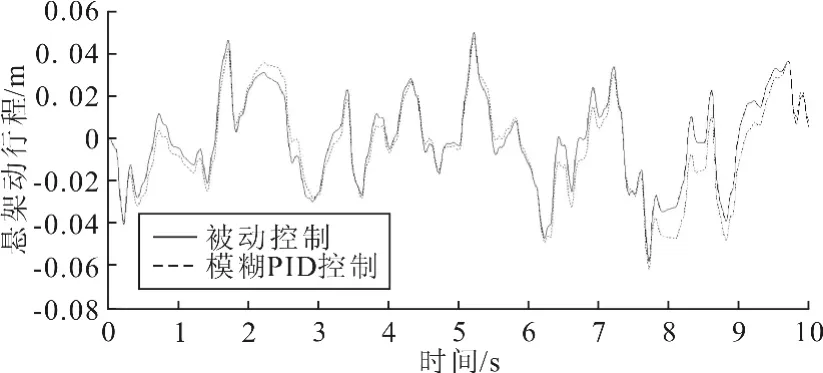
圖5 懸架動行程與時間仿真曲線

圖6 輪胎動載荷與時間仿真曲線
[1]高美靜.復雜非線性系統的智能控制[D].秦皇島:燕山大學,2002.
[2]李仲興,李 美,張文娜.車輛空氣懸架PID控制系統的研究[J].拖拉機與農用運輸車,2009,36(5):56-58.
[3]鄭治國,顧仁康.輕工液壓傳動與氣壓傳動[M].北京:中國輕工出版社,1994.
[4]江浩斌,杜瀅君,葉燊辰.新型一體式懸架減振支柱行程相關剛度特性研究[J].振動與沖擊,2012,31(2):66-70.
[5]邱文軍.空氣懸架力學特性及主動控制策略的研究[D].長春:吉林大學,2014.
[6]詹長書,孫世磊.基于聯合型模糊PID的非線性空氣懸架建模與控制[J].武漢理工大學學報,2014,33(4):730-733.
[7]YANG Qiyao,XU Xing,ZHOU Kongkang,et al.Fuzzy adaptive PID control of Semi-active air suspension[J].2010International Conference on Computer,Mechatronics,Control and Electronic Engineering,CMCE 2010,2010,2:513-516.
[8]黃友銳,曲立國.PID控制器參數整定與實現[M].北京:科學出版社,2010.
[9]王述彥,師 宇,馮忠緒.基于模糊PID控制器的控制方法研究[J].機械科學與技術.2011,30(1):166-172.
[10]馮 勇,吳 凱,劉夢安.基于模糊PID算法的汽車半主動懸架振動控制[J].汽車零部件,2012(5):50-54.
[11]XIE Zhengchao,WONG P K,ZHAO Jing,et al.A noise-insensitive semi-active air suspension for heavy-duty vehicles with an integrated fuzzy-wheelbase preview control[J].Mathematical Problems in Engineering,2013(5):550-562.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
