集裝箱碼頭集卡到達時間預測模型*
2015-04-18 08:03:16曾慶成陳文浩
武漢理工大學學報(交通科學與工程版) 2015年6期
關鍵詞:模型
滕 藤 曾慶成 陳文浩
(大連海事大學交通運輸管理學院 大連 116026)
0 引 言
隨著港口之間的競爭不斷加劇,為提高服務水平、提升自身競爭力,集裝箱碼頭集卡入港模式正在由集中入港方式向隨機入港方式轉變.在隨機入港模式下,集卡到達時間不確定性更強,給碼頭作業計劃的制定以及作業管理帶來了巨大的挑戰.突出表現在:一方面,由于集卡到達時間的不確定性,影響堆存計劃的科學性,造成堆場翻箱量增加;另一方面,高峰期集卡大量到達,易造成港口擁堵.準確把握集卡到達規律對提高碼頭作業效率有重要意義,集卡到達時間預測是把握集卡到達規律的有效方式,因此準確預測集卡到達時間成為集裝箱碼頭運營管理者關注的問題.
國內外學者針對集卡到達問題開展了大量研究,Al-Deek[1],Klodzinski等[2-3]利用多層前饋人工神經網絡,預測了港口每天集卡到達量.Xie等[4]提出2種基于核的機器學習方法(高斯過程和ε-支持向量機),改善了神經網絡耗時和過擬合的問題.Sideris等[5]基于經驗概率密度函數預測了每天集卡到達量.同時,一些學者對集卡到達信息對碼頭作業的影響進行研究,如Zhao和Goodchild[6],Jones和 Walton[7]研究表明集卡到達信息可以顯著減少碼頭堆場翻箱率.這些研究主要是通過構建模型預測碼頭一段時間內的集卡到達量,對于集卡微觀到達時間有待進一步研究.另一方面,針對小汽車、公交等車輛到達時間預測問題,有大量的方法,如于濱等[8]建立的公交車運行時間預測模型,Jula等[9]建立的車輛路段行駛時間的預測模型,陳旭梅等[10]提出的車輛運行的動態預測方法等.碼頭集卡到達不但受貨主所在地、道路交通條件的影響,還受碼頭作業情況和船期等因素影響,具有與一般道路車輛不同的時間特征.同時,集裝箱運輸具備以周為單位的波動特征,直接影響集卡入港時間的選擇.本文構建了基于支持向量機(SVM)和Kalman濾波的碼頭集卡到達時間動態預測模型.以SVM模型刻畫碼頭集卡到達的影響因素,通過Kalman濾波,基于集卡實時數據進行動態更新,從而提高預測的精確性和魯棒性.
1 碼頭集卡到達時間動態預測模型
1.1 問題的描述與模型框架
目前,外部集卡GPS的發展為集卡到達時間預測提供了良好的基礎,在集卡運營過程中,可以根據集卡發送的GPS數據預測集卡到達碼頭閘口的行駛時間.由GPS設備在集卡行駛過程中發送行駛數據確定集卡當前位置和時間,結合相應的外部情況預測集卡到達時間,再使用實時信息動態調整預測值提高模型的準確性及穩定性.
本文提出的基于SVM與Kalman濾波的集卡到達時間預測模型見圖1.首先,基于歷史數據,通過樣本值訓練出相應SVM模型,向訓練好的SVM模型輸入相應的輸入變量值預測集卡的行駛路徑及路段行駛時間的初始值.在此基礎上,通過Kalman濾波,處理集卡運行過程中受周圍環境影響容易造成GPS信號的反射及衰減,帶來隨機的噪聲問題,根據實時集卡信息動態調整SVM模型的預測輸出,從而提高到達時間預測的精度和魯棒性.
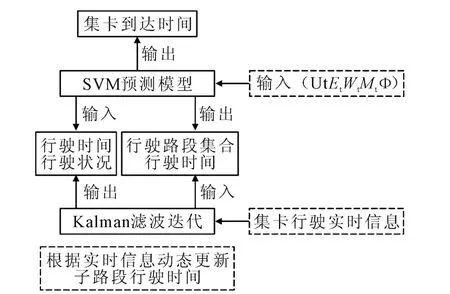
圖1 集裝箱碼頭集卡到達時間預測方法框架圖
為構建模型,定義參數及變量如下.
T為集卡總行駛時間,相對出發位置的集卡到達時間;U 為集卡已行駛路段集合{ui|??αi=1,i∈I};V為仍需行駛路段集合{vi|??βi(1-αi)=1,i∈I};tij為集卡到達路段i子路段j的末端節點時的GPS時間;Et為當集卡位于路段i子路段j時的天氣情況,根據惡劣程度劃分等級,1表示良好天氣,0表示完全無法通行的天氣,0≤Et≤1;Wt為當集卡位于路段i子路段j時的星期數,Wt∈ [1,2,3,4,5,6,7],表示星期一至星期天;Mt為當集卡位于路段i子路段j時的日期數,Mt∈ [1,2,3,…,31],表示1個月中的某天;Φ 為集裝箱類型,0表示空箱,1表示20ft重箱,2表示40ft重箱;aij為路段ai的子路段j,j=1,2,3,…,J;αij為0-1變量,若集卡已行駛過路段i子路段j則為1,否則為0;βij為0-1變量,若路段i子路段j包含于集卡行駛路徑中則為1,否則為0;為路段i子路段j行駛時間的SVM預測值;zij為路段i子路段j行駛時間的測量值(實際值)為最優濾波估計值;Aij為狀態轉移量參數;Hij為測量誤差參數;wij為均值為0的高斯白噪聲,協方差為Q;rij為均值為0的高斯白噪聲,協方差為R;為xij的先驗誤差的協方差;Pi,j為xij的后驗誤差的協方差;Kij為卡爾曼增益矩陣.
1.2 基于SVM的到達時間預測
支持向量機是通過從有限觀測數據中挖掘出無法通過原理分析得到的規律,從而對未知數據或無法觀測的新現象進行預測和判斷的一種有效的預測方法.SVM是一個凸二次優化問題,并且保證找到的極值就是全局最優.對于SVM的具體推導過程見文獻[11].
本文中設計的SVM預測流程見圖2,首先需要設定訓練集,再使用網格搜索和交叉驗證方法確定最優的模型參數(C,v),然后再對核函數進行選擇,再通過輸入參數及訓練集訓練SVM模型,再把輸入值輸入該訓練好的SVM進行預測.本文中,設定的輸入變量為{U,t,Et,Wt,Mt,Φ},模型的輸出變量為{V,i∈I,j∈J}.
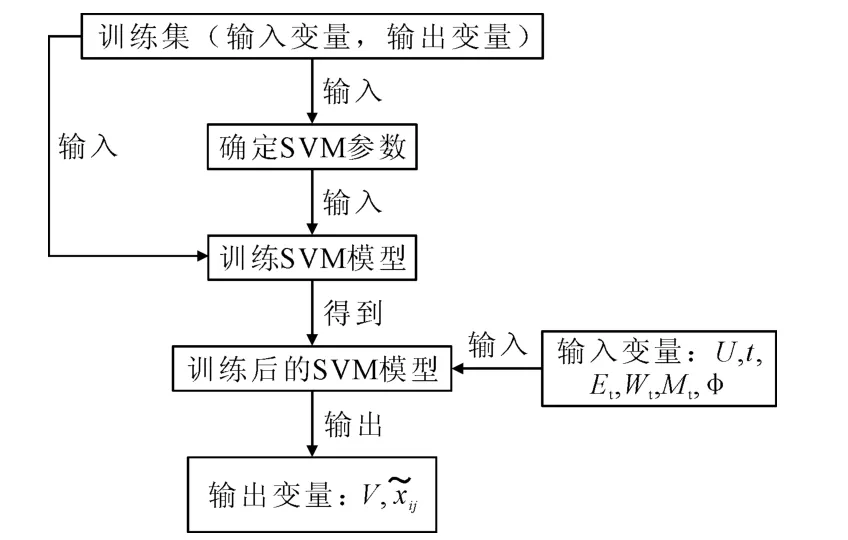
圖2 基于SVM的集卡到達時間預測流程圖
則在t時刻集卡到達時間預測值為:
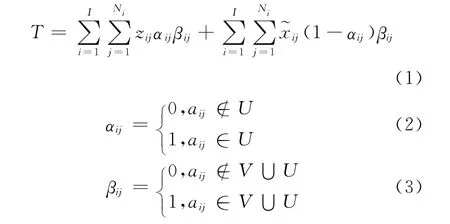
式(1)中第一部分為已行駛的時間;第二部分為基于SVM預測的剩余行駛時間.其中:V和,i∈I,j∈J需要由SVM模型求得.
1.3 基于Kalman算法動態更新到達時間預測值
Kalman濾波算法采用線性隨機系統的狀態空間模型描述過濾器,并使用狀態的遞歸公式,以線性無偏最小均方誤差估計為標準,求得系統狀態的最佳估計,以過濾噪音.這里,根據車輛運行實時信息并結合SVM預測結果,通過Kalman濾波迭代動態更新路段行駛時間,提高預測準確性.Kalman濾波模型的時間關系見圖3.其中到達時間分為兩部分:第一部分為已經行駛過的路段以及正在行駛的路段中已行駛的子路段的行駛時間,第二部分為正在行駛路段中未行駛的子路段的Kalman濾波預測值以及未行駛路段的預測時間.
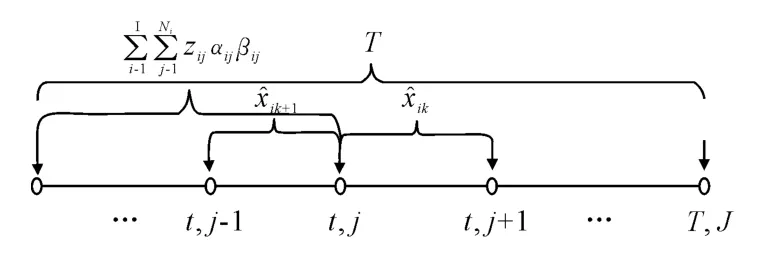
圖3 動態預測時間關系示意圖
根據GPS測量得到的上一子路段的運輸時間觀察值zij,再根據SVM模型預測集卡的行駛路徑V及對應路段行駛時間的預測值,利用Kalman濾波算法更新所有路段行駛時間預測值,通過不斷的更新迭代提高集卡到達時間T的預測精度.
構建基于Kalman濾波的集卡到達時間動態預測模型:
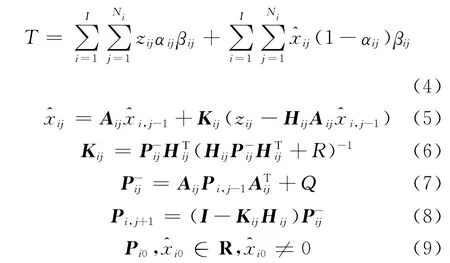
式(4)表示集卡完成行駛所需要的全部時間.其中正在行駛的路段中未行駛的子路段的初始值為最近行駛子路段的行駛時間.式(5)~(9)為Kalman濾波的遞推方程.
2 算例分析
為驗證本文提出方法的有效性,通過深圳集裝箱碼頭的集卡數據進行實例分析,收集了共計4 387輛次集卡GPS數據.在剔除不合理點后,根據卡定位誤差修正方法,對定位丟失點采用“插值法”補齊和對偏離點采用“垂直投影法”進行處理.
根據每條GPS數據提供的信息,標定出對應輸入變量及輸出變量,并且將原始GPS數據按運輸發生時間均分為兩部分,一部分構成訓練樣本,用于訓練動態預測模型中的支持向量機,另一部分用于預測和檢驗模型.
2.1 誤差分析
通過交叉驗證和網格搜索的方法確定SVM中徑向基函數的參數,最終的得到本例的C=523,ε=0.070 844,據此進行SVM 預測.對預測值進行誤差分析檢驗模型的準確性.本文通過計算平均相對預測誤差MAPE對預測的準確度進行分析,并比較各個路段的預測誤差情況.
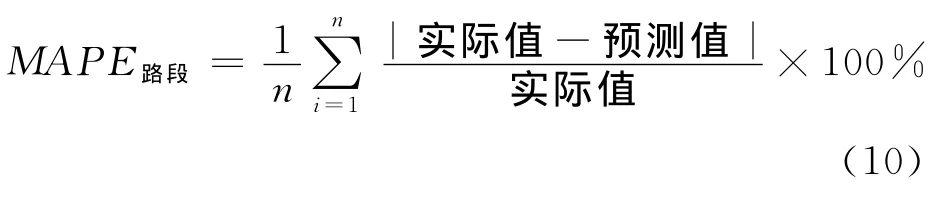
式中:n為經過該路段的集卡數量;MAPE值則表示平均偏差占平均值的百分數,MAPE值越小,模型越精確,可靠性越強.
圖4表示基于SVM預測的計算結果.經試算,80.4%的路段誤差最大點處于預測結果的最大或最小值上,小于20%的情況發生在接近平均值的位置.此外,基于SVM模型的預測誤差隨路段長度的增加而增加.且預測結果的上下界均偏離平均誤差范圍的程度較大,該方法的魯棒性不高,在預測個別集卡時存在較大偏差.同時,預測誤差與路段長度之間并非完全的線性關系,這是由于其不僅受路段長度的影響,而且與天氣、交通狀況等有關.
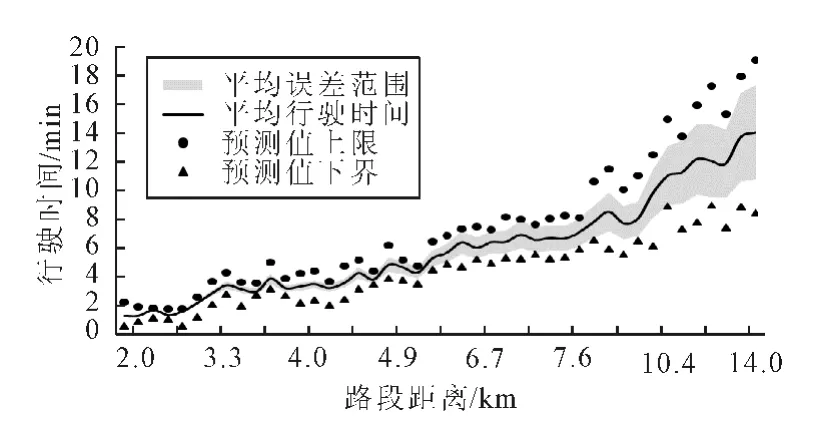
圖4 靜態預測誤差結果(基于SVM的方法)
基于SVM和Kalman濾波的動態預測模型的預測結果及誤差分析見圖5.

圖5 動態預測誤差
由圖4、圖5可見,動態預測方法較靜態方法精度高.而且,與靜態方法相比,動態預測的精度隨路段距離增加變化的幅度較小,結果的上下界范圍較小,具有良好的預測效果.隨著路段長度增加,預測精度下降,這是由于長距離路段交通狀況更復雜,受到隨機因素影響更大大,而且遇到突發事故的幾率也增大.因此,基于SVM和Kalman的動態預測提高了預測精度和魯棒性,是預測集裝箱碼頭集卡到達時間的有效方法.
2.2 敏感性分析
為進一步分析各因素的重要性,進行敏感性分析.采用蒙特卡洛法進行仿真分析:在給定的集合中,隨機抽取一個個體,僅改變這個個體的一個影響因素的數值,然后使用動態預測模型進行預測,比較新的預測結果與原有的差別.由于影響因素在歸一化后,范圍都在[0,1]之間,因此每次改變量為0.1,則有預測結果對某個影響因素的敏感度R.
令n=n+1,抽取新的個體,重復上述過程,直到R的變化小于0.001.依次對變量:時刻t、天氣情況Et、星期數Wt、日期數Mt和貨物類型Φ進行敏感度分析,結果見表1.從結果可以看出,變量中影響最大的是時刻數,其次是天氣情況;影響最小的是日期數.

表1 敏感度分析結果
3 結束語
針對集裝箱碼頭外部集卡到達時間預測問題,采用SVM和Kalman濾波相結合的方法,以SVM支持向量機的預測結果為初始值,通過集卡車載GPS獲取實時數據,使用Kalman濾波算法對結果進行動態更新.結果表明,基于SVM和Kalman濾波的動態預測模型能提高集卡到達時間預測準確性和魯棒性.
碼頭集卡到達時間預測影響因素復雜,進一步研究可以考慮更多因素,如,紅綠燈數量、集裝箱貨物類型的影響,進一步提高預測的效果.同時,結合多種交通信息或數據進行預測也是值得進一步研究的方向.
[1]AL-DEEK H M,JOHNSON G,MOHAMED A,et al.Truck trip generation models for seaports with container and trailer operation[J].Transportation Research Record:Journal of the Transportation Research Board,2000,1719(1):1-9.
[2]KLODZINSKI J,AL-DEEK H M.Transferability of an intermodal freight transportation forecasting model to major Florida seaports[J].Transportation Research Record:Journal of the Transportation Research Board,2003,1820(1):36-45.
[3]KLODZINSKI J,AHMAD A D,GEORGIOPOULOS M,et al.Development of a java applet for generating truck trips from freight data[J].Transportation Research Record:Journal of the Transportation Research Board,2004,1870(1):10-17.
[4]XIE Y,HUYNH N.Kernel-based machine learning methods for modeling daily truck volume at seaport terminals[J]. Transportation Research Record:Journal of the Transportation Research Board,2009,1875(2):110-117.
[5]SIDERIS A,BOILéM P,SPASOVIC L N.Using on-line information to estimate container movements for day-to-day marine terminal operation[R].New Jersey:New Jersey Institute of Technology,2010.
[6]ZHAO W,GOODCHILD A V.The impact of truck arrival information on container terminal rehandling[J].Transportation Research Part E:Logistics and Transportation Review,2010,46(3):327-343.
[7]JONES E G,MICHAEL W C.Managing containers in a marine terminal:Assessing information needs[J].Transportation Research Record:Journal of the Transportation Research Board,2002(1):92-99.
[8]于 濱,楊忠振,林劍藝.應用支持向量機預測公交車運行時間[J].系統工程理論與實踐,2007(4):160-172.
[9]JULA H,DESSOUKY M,IOANNOU P A.Realtime estimation of travel times along the arcs and arrival times at the nodes of dynamic stochastic networks[J].Intelligent Transportation Systems,IEEE Transactions on,2008,9(1):97-110.
[10]陳旭梅,龔輝波,王景楠.基于SVM和Kalman濾波的BRT行程時間預測模型研究[J].交通運輸系統工程與信息,2012,12(4):29-34.
[11]DONG B,CAL C,LEE S E.Applying support vector machines to predict building energy consumption in tropical region[J].Energy and Buildings,2005,7(5):545-553.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19