4-PUS/PUU并聯(lián)機(jī)構(gòu)在機(jī)床上的應(yīng)用*
2015-04-19 02:03:06鄭小民鄒曉暉王紅州
機(jī)械制造 2015年11期
□ 鄭小民 □ 鄒曉暉 □ 高 健 □ 王紅州
1.江西省機(jī)械科學(xué)研究所 南昌 330002
2.沈陽凱迪絕緣有限公司 沈陽 110025
并聯(lián)機(jī)床是將具有高剛度、高精度、高負(fù)載能力等優(yōu)點(diǎn)的并聯(lián)機(jī)構(gòu)[1]應(yīng)用在機(jī)床行業(yè)的一種新型數(shù)控加工設(shè)備,并聯(lián)機(jī)床實(shí)質(zhì)上是現(xiàn)代機(jī)器人技術(shù)和機(jī)床結(jié)構(gòu)技術(shù)相結(jié)合的產(chǎn)物,其原型是并聯(lián)機(jī)器人操作機(jī)[2]。并聯(lián)機(jī)床的基本特征是安裝刀具的動(dòng)平臺(tái)由多個(gè)支鏈連接到固定平臺(tái),通過這些支鏈上的主動(dòng)副驅(qū)動(dòng)動(dòng)平臺(tái)運(yùn)動(dòng),以改變刀具在空間的位置和姿態(tài),從而實(shí)現(xiàn)刀具相對(duì)工件的進(jìn)給運(yùn)動(dòng)。由于采用了并聯(lián)結(jié)構(gòu),所以并聯(lián)機(jī)床相對(duì)傳統(tǒng)機(jī)床具有的特點(diǎn)[3]:① 系統(tǒng)剛度質(zhì)量比大;② 響應(yīng)速度快;③ 機(jī)械本體的精度較高;④ 環(huán)境適應(yīng)性強(qiáng);⑤技術(shù)附加值高。
目前國內(nèi)外研究的并聯(lián)機(jī)床大都集中在3自由度和6自由度的機(jī)型上,而對(duì)機(jī)床來說,要加工復(fù)雜的零件最多需要5個(gè)自由度就可以完成。所以,6自由度并聯(lián)機(jī)構(gòu)應(yīng)用在并聯(lián)機(jī)床上將有1個(gè)多余的自由度,這顯然是一種不必要的浪費(fèi)。而3自由度的并聯(lián)機(jī)構(gòu)為完成復(fù)雜的任務(wù),就必須借助其它2個(gè)自由度的運(yùn)動(dòng),這將使并聯(lián)機(jī)構(gòu)的優(yōu)點(diǎn)大打折扣。因此,研究5自由度的并聯(lián)機(jī)床是非常有意義的。燕山大學(xué)研究了構(gòu)型分別為5-UPS/PRPU和6-PUS/UPU的五軸聯(lián)動(dòng)并聯(lián)機(jī)床[4,5];浙江大學(xué)研究了構(gòu)型為 5-PUS/UPU 的五軸聯(lián)動(dòng)并聯(lián)機(jī)床[6];南陽理工學(xué)院研究了構(gòu)型為5-UPS/UPU的五軸聯(lián)動(dòng)并聯(lián)機(jī)床[7];筆者研究了4-PUS/PUU并聯(lián)機(jī)構(gòu)在機(jī)床上的應(yīng)用。
1 4-PUS/PUU并聯(lián)機(jī)床構(gòu)型
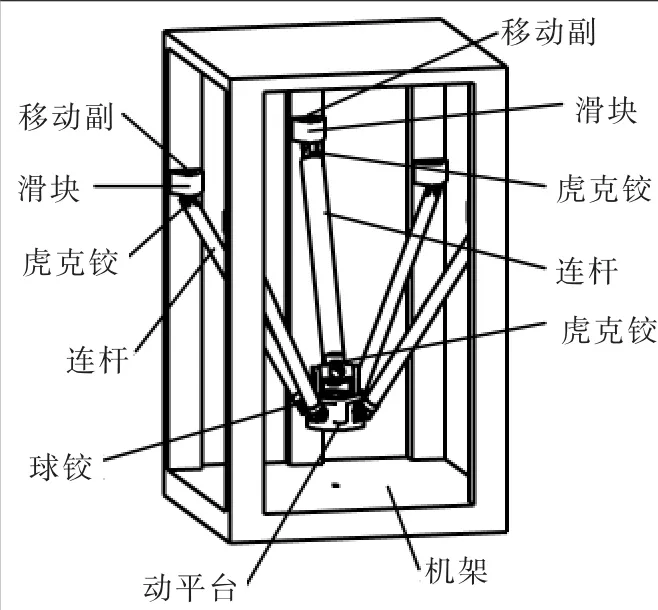
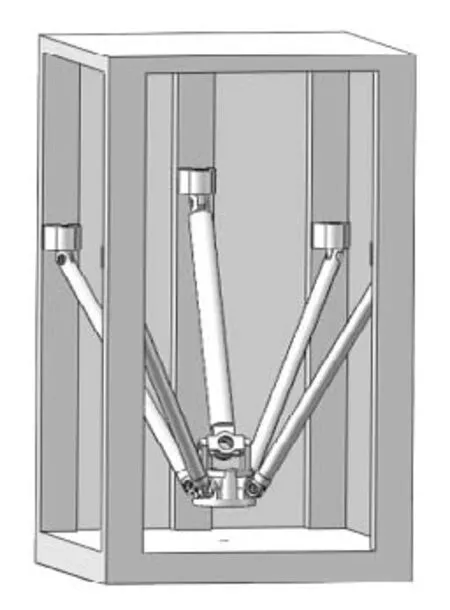
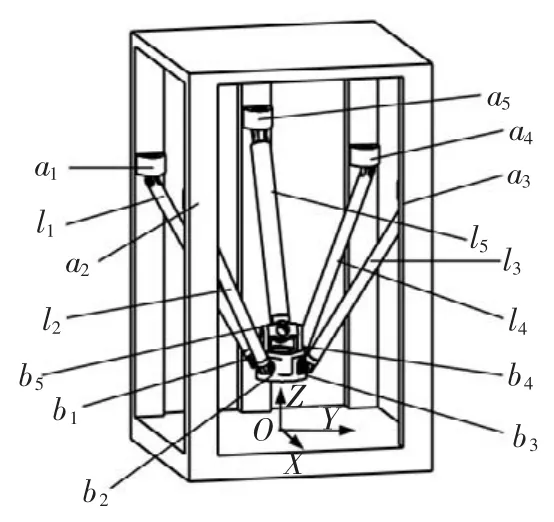
▲圖1 4-PUS/PUU并聯(lián)機(jī)床
如圖1所示,4-PUS/PUU并聯(lián)機(jī)床由機(jī)架、4條相同的無約束支鏈、1條約束支鏈以及動(dòng)平臺(tái)組成。無約束支鏈由滑塊、連桿組成,滑塊一端通過移動(dòng)副與機(jī)架連接,另一端通過虎克鉸與連桿連接,連桿另一端通過球鉸與動(dòng)平臺(tái)連接。約束支鏈同樣由滑塊、連桿組成,滑塊一端通過移動(dòng)副與機(jī)架連接,另一端通過虎克鉸與連桿連接,連桿另一端通過虎克鉸與動(dòng)平臺(tái)連接。機(jī)架上安裝5條平行導(dǎo)軌,其中4條導(dǎo)軌按照長方形的4個(gè)頂點(diǎn)位置布置,分別與4條無約束支鏈連接,第5條導(dǎo)軌安裝在長方形一條邊的中點(diǎn)位置,與約束支鏈連接,滑塊可在導(dǎo)軌上移動(dòng),5個(gè)滑塊運(yùn)動(dòng)帶動(dòng)5根連桿運(yùn)動(dòng),再帶動(dòng)動(dòng)平臺(tái)運(yùn)動(dòng),即實(shí)現(xiàn)動(dòng)平臺(tái)及其上安裝的電主軸的三平兩轉(zhuǎn)空間5自由度運(yùn)動(dòng)。
2 4-PUS/PUU并聯(lián)機(jī)構(gòu)的自由度分析[8]
4-PUS/PUU并聯(lián)機(jī)構(gòu)由機(jī)架、動(dòng)平臺(tái)以及連接這兩部分的5條支鏈組成,動(dòng)平臺(tái)的運(yùn)動(dòng)情況受這5條支鏈的影響。每條支鏈包含多個(gè)運(yùn)動(dòng)副,而每個(gè)運(yùn)動(dòng)副可由運(yùn)動(dòng)螺旋來表示,即每條支鏈有自己的運(yùn)動(dòng)螺旋系,運(yùn)動(dòng)螺旋系的反螺旋為支鏈的約束螺旋系,表示該條支鏈能夠提供給動(dòng)平臺(tái)的約束,所有支鏈的約束螺旋系求并可獲得動(dòng)平臺(tái)所受的約束螺旋系,再對(duì)動(dòng)平臺(tái)約束螺旋系求反螺旋,可獲得動(dòng)平臺(tái)的運(yùn)動(dòng)螺旋系,該運(yùn)動(dòng)螺旋系即為動(dòng)平臺(tái)的自由度,也稱為4-PUS/PUU機(jī)構(gòu)的自由度。
4 條無約束支鏈 li(i=1、2、3、4) 具有相同的結(jié)構(gòu),支鏈運(yùn)動(dòng)螺旋如圖2所示,其螺旋系表達(dá)為:
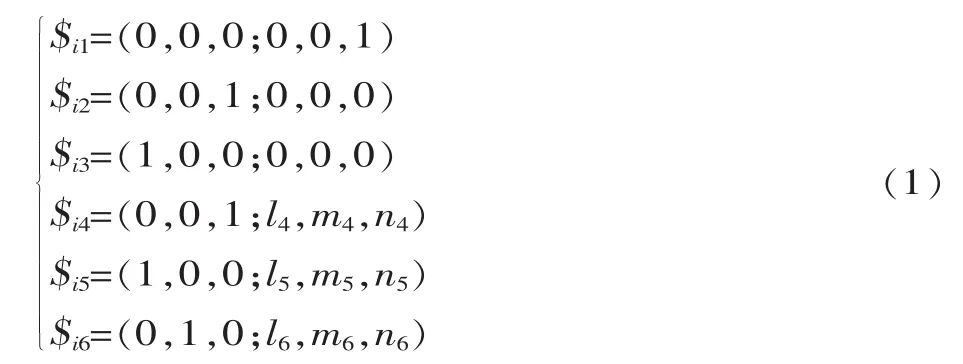
該螺旋系為六系螺旋,不存在反螺旋(無約束螺旋系),故這4條支鏈不能給動(dòng)平臺(tái)提供約束。
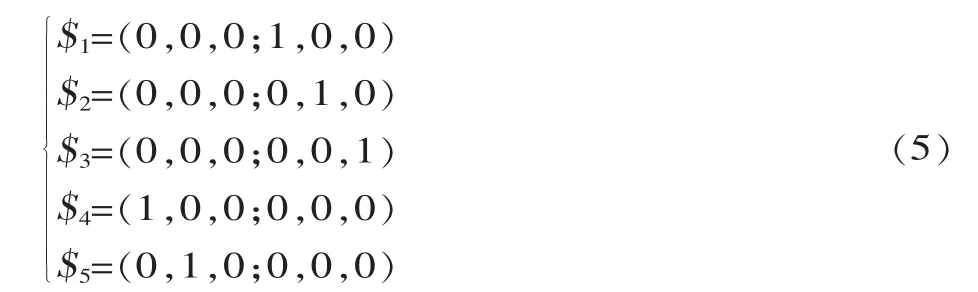
約束支鏈l5的運(yùn)動(dòng)螺旋如圖3所示,其螺旋系表達(dá)為:
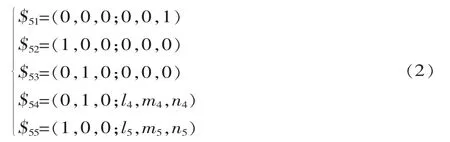
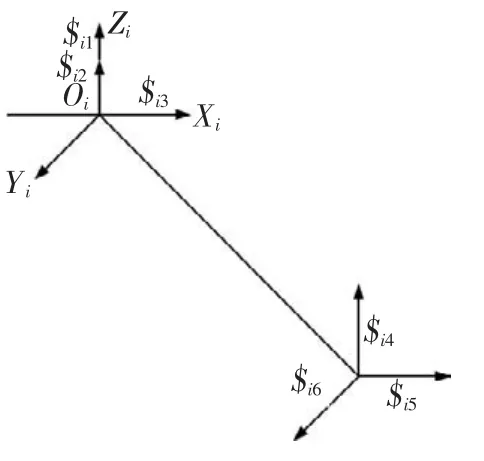
▲圖2 無約束支鏈運(yùn)動(dòng)螺旋
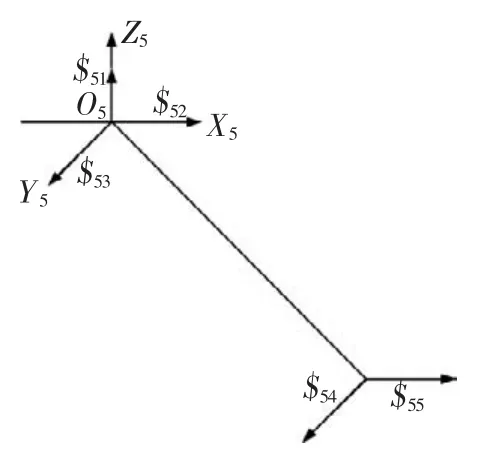
▲圖3 約束支鏈運(yùn)動(dòng)螺旋
對(duì)該螺旋系求逆,獲得其反螺旋為:

該螺旋即為約束支鏈提供給動(dòng)平臺(tái)的約束。對(duì)所有支鏈的約束螺旋求并,可得動(dòng)平臺(tái)的約束螺旋系,由于4-PUS/PUU機(jī)構(gòu)中5條支鏈只有1條約束支鏈提供約束,故動(dòng)平臺(tái)的約束螺旋與約束支鏈的約束螺旋相同,為:

對(duì)該螺旋求反螺旋,獲得動(dòng)平臺(tái)的運(yùn)動(dòng)螺旋系為:
該運(yùn)動(dòng)螺旋系即為動(dòng)平臺(tái)的自由度,表示動(dòng)平臺(tái)具有三維平動(dòng)兩維轉(zhuǎn)動(dòng)空間5自由度的運(yùn)動(dòng)。
3 基于SolidWorks的4-PUS/PUU機(jī)構(gòu)運(yùn)動(dòng)學(xué)分析
如圖4所示,在SolidWorks中建立4-PUS/PUU并聯(lián)機(jī)床各零部件的三維模型,并按照所需連接方式完成裝配圖。如圖5所示,機(jī)架底面相互垂直的兩個(gè)方向?yàn)閄、Y軸,按右手法則確定Z軸,建立基礎(chǔ)坐標(biāo)系,并給出了4-PUS/PUU機(jī)構(gòu)的連桿及連接點(diǎn)的表達(dá)方式。圖6所示為俯視連桿連接點(diǎn)的位置示意圖,圖7所示為動(dòng)平臺(tái)上各連接點(diǎn)的位置示意圖,其具體尺寸見表1。
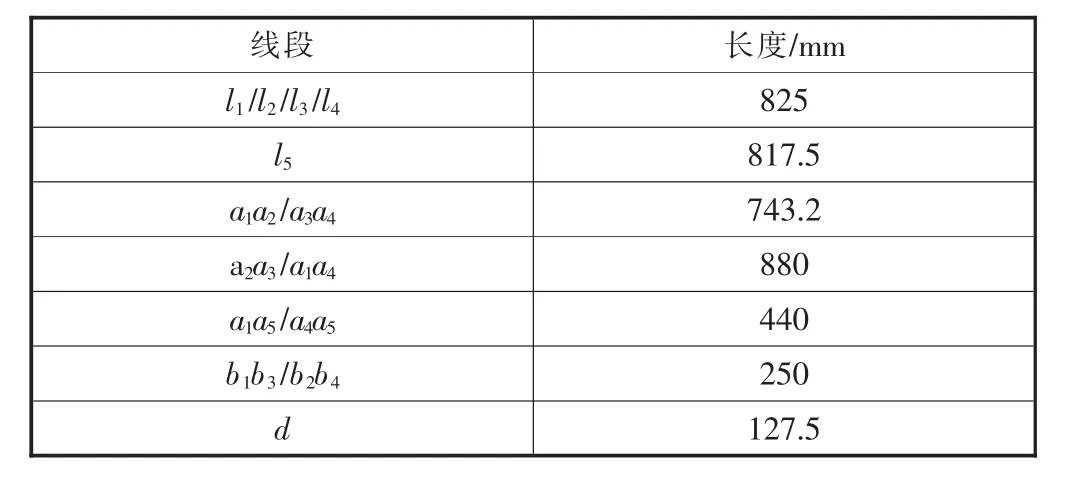
表1 4-PUS/PUU機(jī)構(gòu)具體尺寸
▲圖4 4-PUS/PUU機(jī)構(gòu)的三維建模
▲圖5 4-PUS/PUU機(jī)構(gòu)標(biāo)記符號(hào)
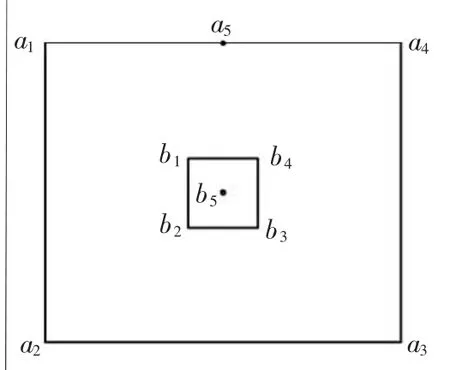
▲圖6 俯視標(biāo)記符號(hào)
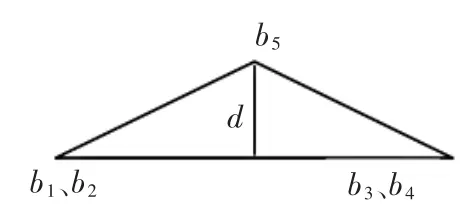
▲圖7 動(dòng)平臺(tái)連接點(diǎn)標(biāo)記符號(hào)
以 a1、a2、a3、a4、a5的坐標(biāo)分別為 (-371.6,-440,1036)、 (371.6, -440,1036)、 (371.6,440,1036)、 (-371.6,440,1036)、 (-371.6,0,1207.85)為初始位置,動(dòng)平臺(tái)在0~2 s內(nèi)勻速沿X軸平動(dòng)100 mm,動(dòng)平臺(tái)在3~4 s內(nèi)勻速沿Y軸平動(dòng)100 mm,動(dòng)平臺(tái)在5~6 s內(nèi)勻速沿Z軸平動(dòng)100 mm,可獲得動(dòng)平臺(tái)運(yùn)動(dòng)過程中支鏈滑塊的運(yùn)動(dòng)情況,圖8給出了約束支鏈滑塊(可用a5點(diǎn)來表示)在0~6 s內(nèi)的位移、速度和加速度。
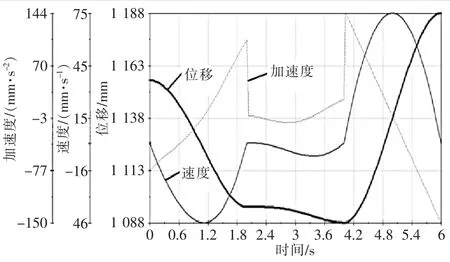
▲圖8 約束支鏈滑塊的運(yùn)動(dòng)輸出
4 結(jié)論
(1)采用螺旋理論建立了4-PUS/PUU機(jī)構(gòu)各支鏈運(yùn)動(dòng)螺旋系,并通過運(yùn)動(dòng)螺旋求交,約束螺旋求并的原則得出動(dòng)平臺(tái)的自由度數(shù)目和性質(zhì),該機(jī)構(gòu)具有三維平動(dòng)兩維轉(zhuǎn)動(dòng)空間5自由度的運(yùn)動(dòng)。
(2)在SolidWorks軟件中建立4-PUS/PUU機(jī)構(gòu)零部件的三維模型,并通過適當(dāng)?shù)募s束建立機(jī)構(gòu)的三維裝配圖,通過給定動(dòng)平臺(tái)的運(yùn)動(dòng)軌跡及速度獲得支鏈滑塊的位置、速度、加速度等運(yùn)動(dòng)學(xué)數(shù)據(jù)。
[1]程世利.并聯(lián)機(jī)構(gòu)若干基本問題的研究[D].南京:南京航空航天大學(xué),2011.
[2]汪勁松,黃田.并聯(lián)機(jī)床-機(jī)床行業(yè)面臨的機(jī)遇與挑戰(zhàn)[J].中國機(jī)械工程,1999,10(10):1103-1107.
[3]韓先國.并聯(lián)機(jī)床相關(guān)理論及設(shè)計(jì)方法研究[D].北京:北京航空航天大學(xué),2002.
[4]梁龍曉.5UPS-PRPU冗余并聯(lián)機(jī)床控制系統(tǒng)設(shè)計(jì)與冗余驅(qū)動(dòng)控制研究[D].秦皇島:燕山大學(xué),2014.
[5]梁順攀,竇玉超,趙永生.6-PUS/PUU并聯(lián)機(jī)構(gòu)開放式控制系統(tǒng)的研究[J].計(jì)算機(jī)工程與設(shè)計(jì), 2014, 35(1):303-309.
[6]李凌豐,彭鐵柱,劉際軒.空間五自由度并聯(lián)機(jī)床[P].中國專利:CN101850519A,2010-10-06.
[7]賈艷麗,劉巖.基于Raleigh-Ritz的五自由度并聯(lián)機(jī)床剛度分析及仿真[J].制造業(yè)自動(dòng)化, 2014,36(6):99-111.
[8]黃真,趙永生,趙鐵石.高等空間機(jī)構(gòu)學(xué)[M].北京:高等教育出版社,2006.
