基于超磁致伸縮材料的管道爬行器設計
2015-04-25 09:59:40隋曉梅方秀珍趙章榮
制造業自動化 2015年3期
關鍵詞:結構
隋曉梅,方秀珍,趙章榮
SUI Xiao-mei1, FANG Xiu-zhen1, ZHAO Zhang-rong2
(1.華北科技學院,三河 065201;2.國家林業局北京林業機械研究所,北京 100029)
0 引言
在工業、核工業、石油天然氣等領域中,管道作為一種有效的物料輸送手段而得到廣泛應用,為了提高這些管道的壽命,防止泄露等事故的發生,管道機器人作為滿足高效準確的故障診斷、檢測及維修的手段應運而生,其廣泛地應用于管道的探傷、補口、維修、焊接等諸多領域。目前研制的管道爬行器大多采用傳統的機械結構、電機驅動形式,技術上比較成熟,適用面較廣,可滿足大部分要求[1~3]。但常規的推進方式缺點明顯:結構尺寸大和重量大,功率損失大,噪聲差,運動不靈活。
基于智能材料, 如形狀記憶合金材料(SMA)、超磁致伸縮材料(GMM)、壓電陶瓷材料(PZT)、磁流變液材料等的管道爬行器由于易于微型化,功耗小,運動靈活,噪聲小等優點,逐漸成為研究熱點。趙麗娟等[4]用形狀記憶合金彈簧和普通鋼絲彈簧聯接作為動力驅動元件設計制作出一種蛇形機器人,其動作靠電流的通、斷來控制。趙玉俠等[5]研制出利用形狀記憶合金制成的壓縮彈簧在加熱和冷卻過程中釋放的能量而行進的機器人。張永順等[6]通過管外時變振蕩磁場頻率的改變,媒介于微機器人磁致伸縮微驅動器的磁機耦合作用,將時變振蕩磁場能轉換成機器人彈性腿的振動機械能,從而實現機器人的行走。
本文提出一種基于超磁致伸縮材料管道爬行器的結構設計,可在直徑小且需要較大驅動動力的情況下,能對管道進行有效的檢測與維護。
1 管道爬行器的總體設計
基于超磁致伸縮材料管道爬行器由超磁致伸縮馬達,螺旋頭驅動部件,支撐部件構成。螺旋頭上安裝有三只傾斜輪子、支撐部件上安裝六只可以伸縮的輪子,結構如圖1所示。圖1(a)為管道爬行器整體結構,圖1(b)為爬行器在管道中運行位姿仿真,圖1(c)為爬行器裝配拆分。利用超磁致伸縮旋轉電機驅動器驅動傾斜的輪子螺旋上升,爬行過程中通過卷簧,使三個小輪的向徑同步變化,可以很好適應口徑在一定范圍(70mm~100mm)內變化的管道。萬向連軸節可使爬行器靈活的轉彎(0~90o)。利用超磁致伸縮馬達,大大簡化了管道爬行器的驅動方式,提高了可靠性,降低了成本。整體結構簡單,穩定性高,對環境適應力強,能在各種惡劣環境中正常工作。
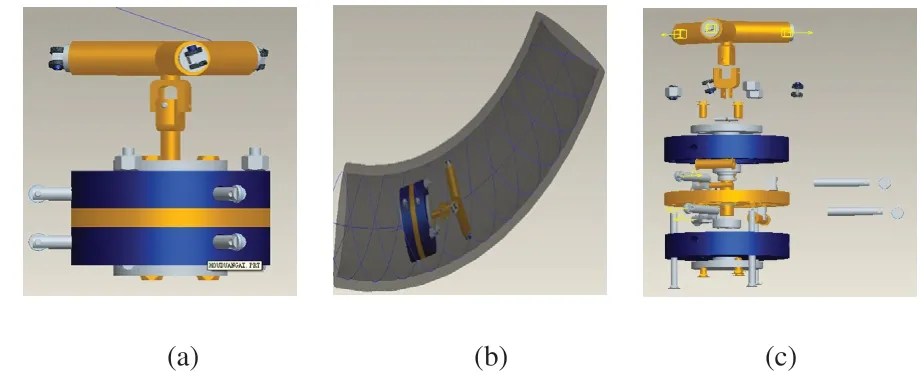
圖1 螺旋管道機器人結構圖
2 超磁致伸縮馬達的設計
新型超磁致伸縮馬達[7]由GMM驅動器、轉子、定子等組成。利用超磁致伸縮棒作為驅動元件,用正余弦波作為激勵電信號驅動轉子旋轉。定子包括預壓機構、柔性放大機構。
2.1 GMM驅動器結構設計
GMM驅動器由棒狀GMM、激勵線圈、線圈骨架、永久磁鐵等零件組成。選擇TX系列稀土大磁滯伸縮材料產品,取超磁致伸縮棒的計算伸長量 ΔL等于設計最大輸出位移Xmax,并且假設磁致伸縮系數λ在外加磁場作用下達到2400×10-6kA/mm以上,超磁致伸縮棒的計算長度L:


圓整超磁致伸縮棒的直徑為8mm,此時最大輸出力為:

式中:E為超磁致伸縮棒的彈性模量,A為超磁致伸縮棒的截面積。
稀土超磁致伸縮材料的尺寸規格國內目前尚沒有統一標準,各生產單位通常可根據用戶要求進行各種尺寸的加工。經上述計算,最后選取的超磁致伸縮棒規格為GMM:Φ8×45mm。2片2.5mm厚的釹鐵硼永久磁鐵貼于GMM兩端,用于提供偏置磁場,消除“倍頻現象”。根據不同壓力下GMM磁滯伸縮特性,施加預壓力后會使GMM能量得到充分發揮,為了能獲得所需預壓應力且方便調節,使機械結構更加微小化,采用壓圈彈簧結構給磁致伸縮棒施加壓力,如圖2所示。GMM預壓力強度則對超磁致伸縮棒的預壓力F:

超磁致伸縮棒的預壓縮的位移:


考慮到對調節方便程度和壓力大小區分度的要求,取預壓蝶簧的壓縮變形量Δh為0~5mm比較合適,此時可以求出對應的預壓蝶簧剛度系數kl,這樣就可以根據螺栓擰度乘以kl來確定預應力大小。所加的壓應力與超磁致伸縮棒軸線嚴格平行、均衡分布,避免產生彎矩。
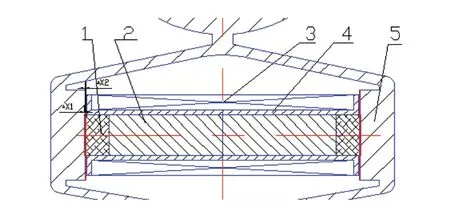
圖2 彎壓曲放大驅動器結構示意圖
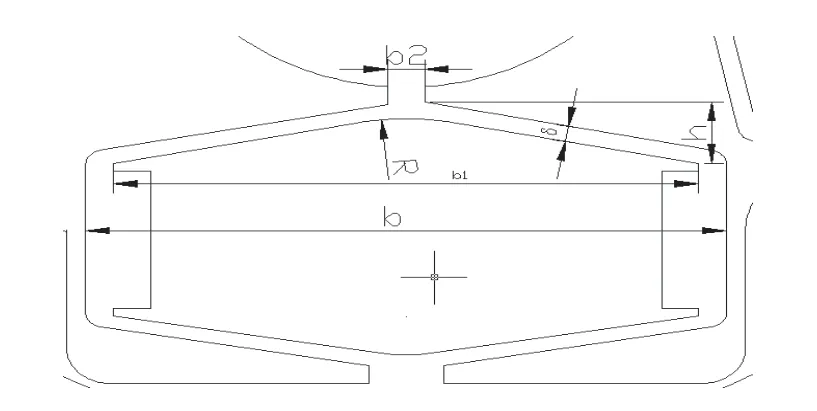
圖3 柔性放大機構
考慮到馬達結構、預壓力施加方式等因素,最終選擇如圖3所示的Shell柔性結構。GMM單元驅動器沿Shell結構的長軸放置,通電線圈激勵GMM 材料伸縮,推動Shell產生柔性變形,在短軸上形成放大的輸出位移。在實現微位移放大的同時也使位移的方向產生90o轉變。放大機構所用材料為65Mn,彈性模量E=200Gpa,泊松比μ=0.288,極限應力780Mpa。機構總寬度b=68mm,空腔底寬b1=54mm,材料厚度δ=1.6mm,深度h=4mm。所設計的柔性放大機構其放大倍數可提高一倍。
2.2 定子、轉子結構設計
以往超磁致伸縮馬達是利用超磁致伸縮材料的磁致伸縮效應, 在驅動磁場的激勵下, 由磁致伸縮振子(馬達定子)將電磁能轉換成機械能, 并通過定子和轉子間的接觸摩擦力推動轉子運動。這種傳動機構能量損耗大,零件磨損嚴重,壽命短。鑒于以往電機的缺點,本文在旋轉電機傳動結構中使用一齒差漸開線行星齒輪傳動的方式進行傳動,其顯著的優點在于摩擦小、結構簡單緊湊,有利于電機的進一步小型化,傳動效率高達0.85~0.91,運轉平穩,齒形容易加工,裝拆方便等。查詢相關數據,設計傳動比i=35,輸入軸的頻率f=10Hz,則輸出轉速:

為減少裝配誤差對馬達性能的影響, 將定子與驅動器通過線切割加工方法做成一體,裝配如圖4所示。超磁致伸縮馬達具體設計參數如下:
GMM:Ф8×45mm;線圈匝數:2640,線圈內徑為5mm,外徑為9.8mm,長度為51mm;繞線架:內徑為9.8mm,壁厚為1mm,長度為53mm;釹鐵硼永久磁鐵:Ф8×25mm;轉子直徑:Ф20mm。

圖4 超磁致伸縮馬達裝配圖
3 管道爬行器螺旋頭設計
螺旋頭結構采用較為廣泛的雙層輪結構和徑向彈簧布置方式。雙層輪組合徑向彈簧,如圖5所示。驅動頭采用兩層輪結構,共六個驅動輪,使用雙層輪結構改善了運動的穩定性。工作原理是驅動輪通過三個圓柱支撐在管壁上,彈簧呈徑向星形布局。在彈簧的直接壓力下獲得管道對驅動輪的正向壓力,每個驅動輪承受彈簧對它一半的力,驅動輪在彈簧力和管道壁對驅動輪的徑向支反力的作用下保持靜平衡。根據彈簧呈星形徑向布置的實際允許安裝尺寸,可取彈簧中徑D1=6mm,壓縮量λ1=19-39mm,胡克系數k=2時,彈簧力F1=38N~78N時,經計算圓柱彈簧的幾何尺寸為:鋼絲直徑d=1mm;彈簧外徑D2=8mm;彈簧有效圈數n1=30;彈簧自由高度H0=80mm;彈簧工作高度Hn=41mm~60mm。
4 管道爬行器支撐機構設計
管道爬行器的支撐部分采用三個相差120o的支撐輪支撐著管壁,如圖6所示。為了運動穩定采用雙支撐輪支撐,每個支撐輪桿用螺母裝配在端蓋上,用彈簧支撐著輪桿可以適應不同管徑,且與管壁支撐緊密。端蓋的中心處鉆有一個M16的孔,目的是使該爬行器能夠模塊化,后面可以用相同的結構攜帶負載。端蓋上分布著三個120o的孔,讓三個輪桿通過其中,起到導向的作用。輪桿上的螺紋與螺母連接固定在端蓋上,使輪桿在端蓋孔中滑動而不至于掉出來。螺母與端蓋之間安裝一個彈簧,使輪桿在管壁上有一定的支撐力。支撐桿設計直徑為Ф14mm,長為77mm。支撐桿上與螺母連接的螺紋為M14長為20mm,裝輪子的槽深14mm。銷孔的直徑為Ф6mm。
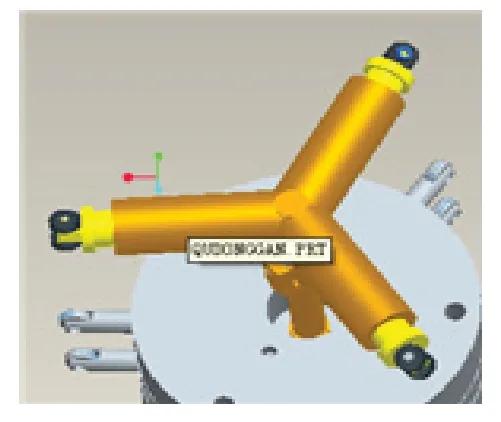
圖5 圓柱彈簧星形徑向布局
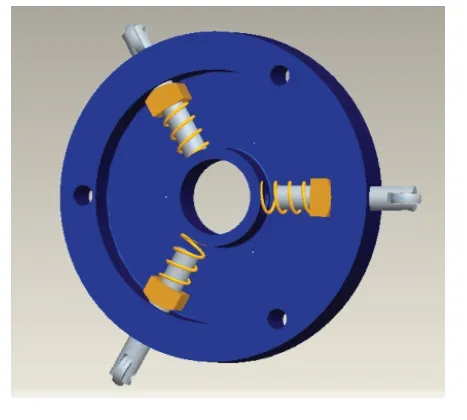
圖6 管道爬行器支撐機構
5 結束語
本文采用超磁致伸縮驅動器研制出一種螺旋管道爬行機器人,并對機器人系統進行了全面結構設計和校核,利用ProE/Mechanism運動仿真功能,檢驗了爬行器在不同輸出轉速和不同驅動輪傾斜角度下,爬行器的驅動輪與其本體不發生干涉,說明設計的有效性。
[1] 杜家熙,寧李譜,寧欣.管道爬行機器人結構研究[J].起重運輸機械,2010(5)∶58-61.
[2] 張延恒,逢增輝.一種蠕動式管道機器人的設計[J].機械設計與制造,2010,4∶13-14.
[3] 徐從啟,解旭輝,戴一帆.新型微小管道機器人驅動特性分析[J].國防科技大學學報,2010,32(1)∶152-158.
[4] 趙麗娟,解曉松,劉杰,等.用形狀記憶合金驅動的一種新型蛇形機器人[J].制造業自動化,2005,27(2)∶32-34.
[5] 趙玉俠,何廣平,高德文.形狀記憶合金驅動的微型管道機器人機械結構設計[J].機械設計與制造,2009,4∶172-174.
[6] 張永順,賈振元,丁凡,等.外磁場驅動無纜微型機器人行走特性的分析[J].機械工程學報,2003,39(6),135-139.
[7] 黃敏,周建軍.新型超磁致伸縮馬達的結構研究[J].機電工程,2006,23(3)∶12-14.
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50
