基于DSP和FPGA的欠驅動靈巧手控制系統設計
2015-04-26 08:24:04孫愷張劼何廣平陸震
機床與液壓 2015年3期
孫愷,張劼,何廣平,陸震
(1.北方工業大學機電工程學院,北京 100144;2.北京航空航天大學自動化科學與電氣工程學院,北京 100191)
0 前言
欠驅動多指靈巧手是一類典型的新型仿人手,它在結構設計上采用了欠驅動原理,使其驅動單元數目少于機構自由度數目,它相對于全驅動靈巧手具有成本低廉、結構簡單、控制相對較易、體積較小、質量較輕等優勢,而且這類機器人手操作靈活,自適應能力較強,能夠完全包絡被抓取物,抓持性能良好[1-2]。目前,許多結構和功能各異的欠驅動靈巧手已被逐漸廣泛應用于殘疾人假肢、航空航天等相關領域,具有較好的應用前景。
為了保證欠驅動靈巧手在操作和抓持各類物體時的運動特點和功能要求,解決其軌跡規劃非完全可控[3]等問題,欠驅動靈巧手控制系統應具備足夠的自動化程度,針對被抓持物體的不同類別和特點,可以準確協調多指抓持過程的運動特性,快速反饋抓持過程中的具體復雜信息,具有較為靈敏的手指感知功能,能夠實時地進行精確高效的控制,確保抓持和操作物體的可靠性和穩定性[4-6]。以往基于欠驅動原理設計的靈巧手控制系統在實現的技術手段上具有一定的局限性,存在一定程度的能量耗散和系統運行不穩定。針對以上相關問題,結合所研制的欠驅動多指靈巧手樣機的運動特性和任務要求,提出了基于DSP和FPGA主從結構的復合式遞階控制系統,并探索了基于遺傳算法的最優抓持運動規劃問題,軟件部分采用模塊化思想設計,最后進行了相關實驗驗證,保證了控制系統的可靠性、穩定性和響應快速性。
1 欠驅動靈巧手機械結構
欠驅動多指靈巧手機械結構包括腱、手指、掌部和內部傳動等部分,如圖1所示。靈巧手手指均采用腱和滑輪的結構傳遞運動和動力,每只手指均分別由一個電機獨立驅動,從而使3個關節依次耦合運動,同時通過對多個電機的有效協調控制和手指壓力信息的采集,最終完成整手的穩定彎曲和伸展動作,形成自適應包絡抓持、操作各類不同物體。
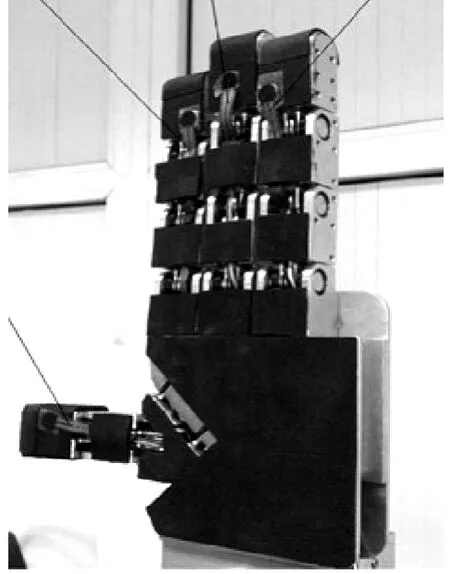
圖1 欠驅動多指靈巧手
2 控制系統總體結構設計
欠驅動多指靈巧手由于其運動特性和任務要求,除了需要對各個被動關節有效的控制之外,還需要對各手指的力/位置和整手多指的協調運動進行實時準確控制,為了滿足上述要求,控制系統采用了主從控制和自主控制相結合的復合式遞階控制體系結構,整個系統由3個分層構成,依次是上位機終端決策層、多指協調運動層和底層控制層,如圖2所示。上位機終端決策層通過USB總線與多指協調運動層交互通信,實時獲取采集到的靈巧手運動、傳感器信號等信息,同時遠程監控靈巧手運行狀態,并根據所獲取的各類信息完成對靈巧手運動軌跡的規劃和自動調整。多指協調運動層負責整體協同工作和信息的反饋。底層控制層主要針對被動關節的運動控制和手指壓力信息采集,該層接受來自上層的運動指令完成對電機的伺服控制,精度較高,具體負責控制器底層行為。

圖2 控制系統總體結構框圖
3 控制系統硬件設計
上位終端決策層主要用于抓持運動整體規劃和自動調整,它負責發出各類單指或多指運動的控制指令,能夠顯示各種狀態信號的監控,包括:單指和多指的運行狀態、伺服系統運動參數(目標速度、絕對位置、位置偏差、電流),壓力傳感器信息、各類報警情況等,同時還可以設置相關參數(如指端壓力閾值、位置零位等),以及調試運行和緊急制動。
由于多指協調運動層直接控制底層設備,它負責協調具體的抓持、操作運動,往往需要有較高可靠性、實時性和靈活性,因此該層采用了DSP和FPGA相結合的主從結構模式,硬件結構如圖3所示。
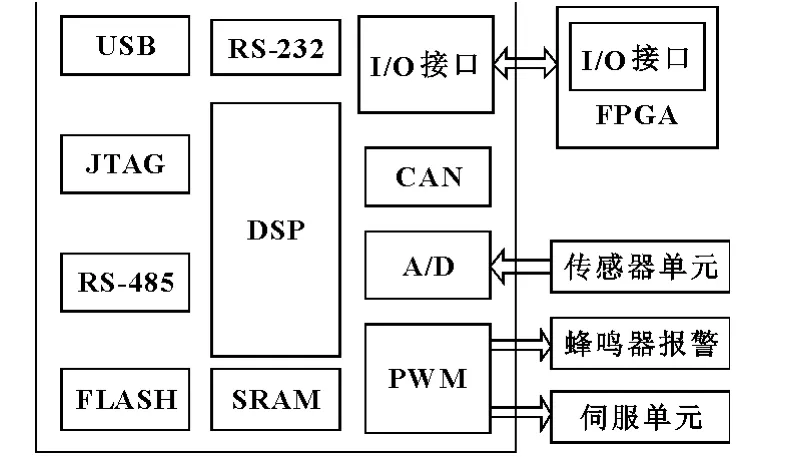
圖3 多指協調運動層硬件結構圖
微處理器選用的是某公司的TMS320F28335,其增加了浮點運算內核,內部資源豐富,主頻可達150 MHz,具有更強大的數據處理能力,同時提供了豐富的片內外設資源和各類接口,如增強型ePWM、A/D等,能夠為控制器算法的實現提供可行的硬件基礎,特別是適合于底層電機控制,滿足抓持任務要求。FPGA由于其強大的邏輯處理和并行數據處理能力,能夠較好地滿足設計任務要求,該控制系統選用的是CycloneⅣ系列的EP4CE6E22C8,其內部具有豐富的邏輯資源。在設計中,FPGA用來實現DSP外圍的譯碼電路和位置信息保存,其內部設計了正交解碼(QEP)鑒相和計數電路,DSP可通過外部存儲器總線EMIF與FPGA進行通信,讀取FPGA對電機編碼器脈沖信號處理完成后所獲得的計數器數據,可用于伺服電機運動信息的獲取,便于協調控制。
該層還外擴了SRAM和Flash,用于大容量存儲數據,USB接口用于與上位終端層通信,232串口和485串口分別用于軟件調試和預留接口,JTAG用于程序下載和仿真,蜂鳴器用于錯誤信息的報警。
底層控制層是整個控制系統設計中最為基礎和關鍵的部分,其主要用于靈巧手手指關節驅動和指端壓力信號的采集,完成穩定地抓持、操作各類物體,如圖4所示。對于伺服電機控制,微處理器DSP具有增強型PWM(ePWM)模塊,該模塊中的每個完整的PWM通道都是由兩個PWM輸出組成,并配有硬件擴展模塊HRPWM(高精度脈沖寬度調制器),因而能夠產生足夠的PWM信號控制直流伺服電機。為了提高控制系統的穩定性和可靠性,伺服電機驅動芯片采用某公司的LP6206PD芯片,同時在處理器和電機驅動芯片之間采取了光耦隔離和整形,提高了抗干擾能力。直流伺服電機集成了光電編碼器,編碼器信號隨著電機的轉動輸出三對差分信號,通過芯片AM26LS32的信號處理,三對差分信號變為三路脈沖信號(即A信號、B信號、C信號),這三路脈沖信號輸入至FPGA內部單元設計的解碼電路(QEP)中,完成伺服電機轉速信息的采集工作,并把結果保存在FPGA內部寄存器中,DSP再由EMIF總線與FPGA進行通信,讀取寄存器數據。在設計中,還對伺服電機電流進行了采樣,最終完成對電機電流環的有效控制。對于指端壓力信息采樣,使用了高精度的壓阻式傳感器FSR系列,該傳感器增強了指端對抓取物體壓力的感知能力,壓力信號通過鉗位、運放等調理電路和RC濾波后被采樣,由DSP內部的A/D轉換器轉換為數字信號,提供給微處理器,實現對指端壓力信息的實時控制,使指端壓力不超過設定的閾值。
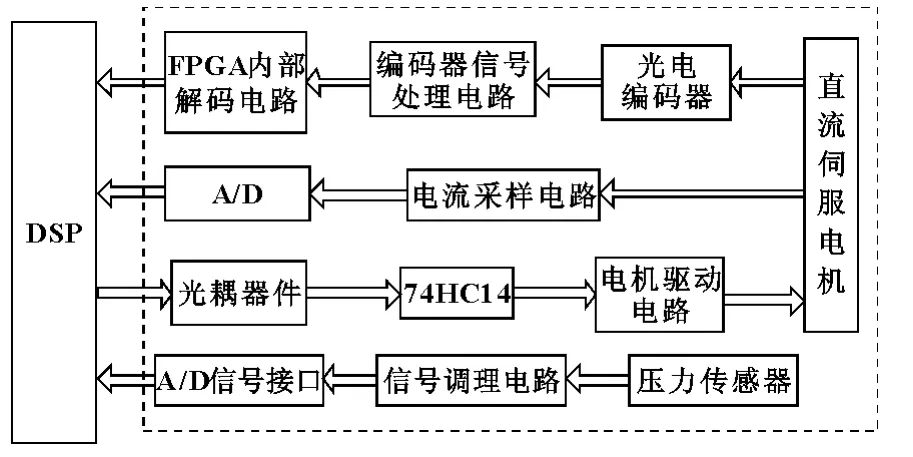
圖4 底層控制層硬件結構圖
控制系統的通信模塊主要用于上位終端層與多指協調運動層間的指令傳輸和信息反饋,根據欠驅動靈巧手仿人抓持物體的實際工作環境和較多的控制信息,采用了USB總線協議作為通信標準,USB總線具有較高的傳輸效率,提高了靈巧手工作的可靠性。芯片采用的是FT245RL,DSP輸出使能信號和讀寫信號(由片選信號通過74HC1G02GV處理得到),同時在設計中也使用了NUP2105L防ESD干擾。
4 控制系統軟件及算法設計
控制系統軟件部分采用了模塊化設計思想,其關鍵在于底層運動控制部分,電機的運動狀態和指端壓力信息的反饋直接影響欠驅動靈巧手能否穩定抓持物體,控制系統各層軟件的設計采用自底向上的原則。根據抓持任務,底層軟件可具體劃分為位置信息保存(包括初始零位信息)、USB和串口通信、電機運動PID控制、抓持、放松回零、抓持力控制等主要功能模塊,空間任意位置均可設置為指節初始零位,電機電流環的錯誤處理單元能有效地避免指節的“彈射”現象所產生的抓持失效和電機堵轉,數字式PID可較好地實現關節位置的閉環控制,力控制模塊能有效地監測指端壓力閾值。上位機軟件負責與下層交互通信,獲取運動狀態、傳感器壓力反饋信息,完成系統監控和運動規劃的軟件調整。圖5所示為底層運動具體的軟件控制流程。
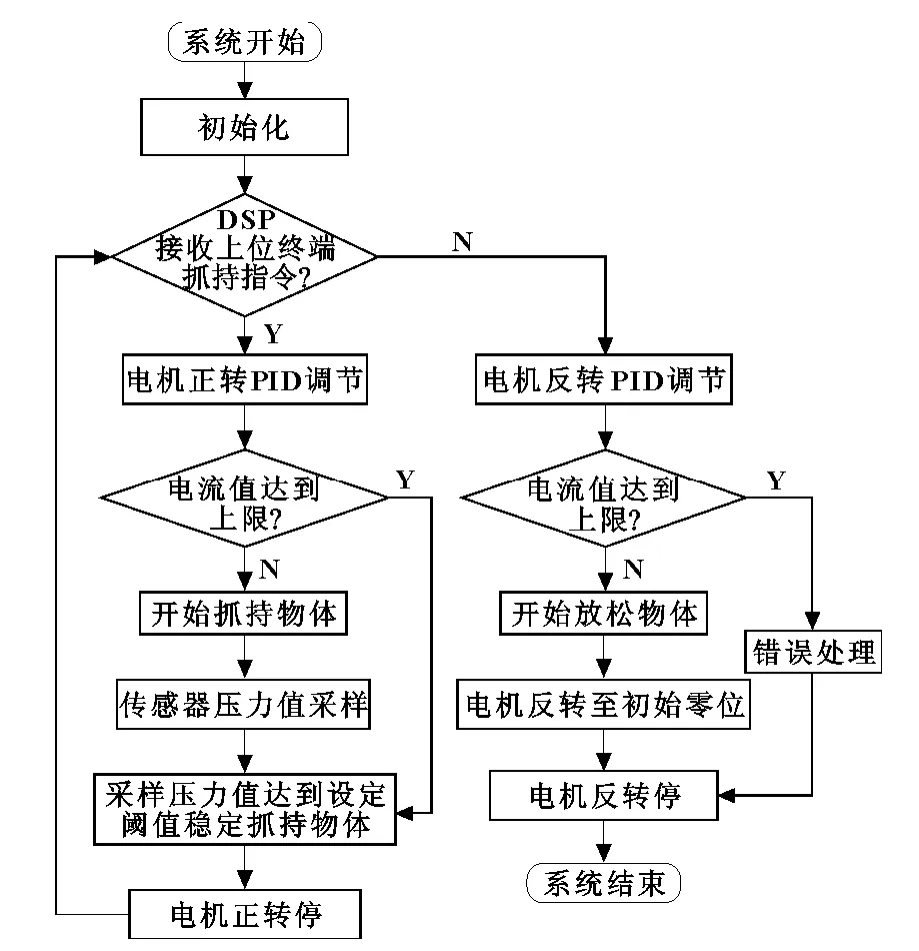
圖5 底層運動控制軟件流程圖
靈活有效的抓持規劃算法是決定整個系統是否穩定的關鍵因素,抓持的目的在于通過接觸點將外部的力與運動傳遞給被抓持物體,使物體受力平衡,能夠實現相關預期操作。文中所述的欠驅動靈巧手采用腱式結構設計,可實現對被抓持物體的包絡抓取,該問題可抽象為一個特殊的車間作業調度問題(JSSP),因此可采用基于遺傳算法(GA)來對欠驅動靈巧手進行近似的最優抓持運動規劃[7]。
車間作業調度問題是一類滿足任務配置和順序約束要求的資源分配問題[8],也是約束組合優化和典型NP難問題。文中所提出的特殊車間作業調度問題可以用以下數學模型描述:
設有M臺設備,N個工件,每個工件包含一道或者多道工序,工件的工序順序預先確定,所有的工件均有相同的加工順序,每臺設備只能加工一個工序,不同的設備對不同的工序加工性能和時間不一致,加工一旦開始無法中斷,工件間具有相同的優先級,使得在滿足性能指標的情況下,能夠確定每個工序合適的加工設備和最短的全部工件加工時間。
結合具體的欠驅動靈巧手抓持運動特性,即:手指各個關節依次運動,各指節依次接觸被抓物表面的適宜點,從而實現包絡抓持,文中所提出特殊的車間作業調度問題和欠驅動靈巧手抓持運動特性的映射關系如表1所示。
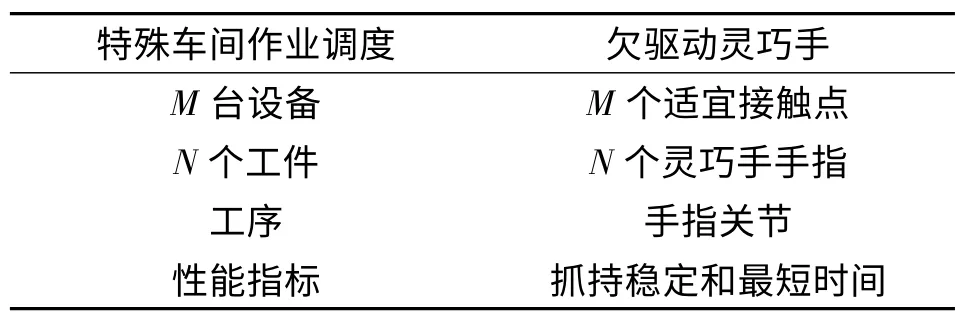
表1 映射關系
其中,上表所述的適宜接觸點需在考慮具體的操作任務的情況下,借用文獻[9]相關算法來實現,文獻[9]給出了在考慮實際被抓物體的重力和慣性等因素下,能夠進行穩定抓持的指尖接觸點所滿足的條件;抓持穩定則可通過力封閉和最短的抓持運動時間等指標進行評價。
在欠驅動包絡抓持規劃算法設計上,采用了遺傳算法(GA)尋求該問題的最優近似解,主要的遺傳操作包括:復制、交配、變異。針對文中所提出基于實際靈巧手工作特性的特殊JSP問題,首先要解決染色體編碼問題,可將工件(靈巧手手指)的工序(手指關節)作為基因元素,從而得到編碼空間的染色體。選擇算子采用輪盤賭選擇方法,在交叉操作中采用文獻[10]所提出的單點順序交叉算子,變異算子采用逆序變異的方法,適應度函數的變換式為F(x)=Cmax-f(x),f(x)表示作業加工最短時間,最后再進行抓持穩定性(力平衡)準則判斷。相關仿真參數設置為:種群規模m=30,交叉概率Pc=0.75,變異概率Pm=0.05,進化代數為150,模擬的結果表明:該算法能夠趨近欠驅動靈巧手的近似最優抓持運動規劃,且算法能夠較好地收斂。
5 控制系統抓持測試實驗
根據欠驅動靈巧手抓持運動性能的要求,搭建了系統硬件平臺進行抓持測試實驗,測試過程如下:上位機終端設定測試初值,協調層接收控制命令,驅動底層電機的具體運動,同時反饋給上位機終端實時顯示,完成對系統的控制和監測,測試結果表明:底層控制層能夠較好地完成運動指令,響應迅速,欠驅動靈巧手能夠穩定地完成抓持各類物體。上位機界面如圖6所示,部分抓持效果如圖7所示。
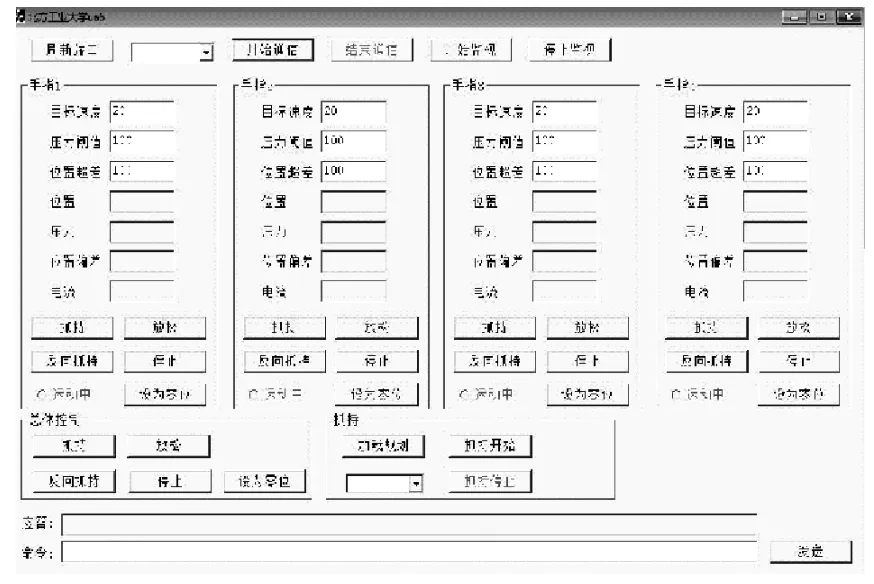
圖6 上位機界面
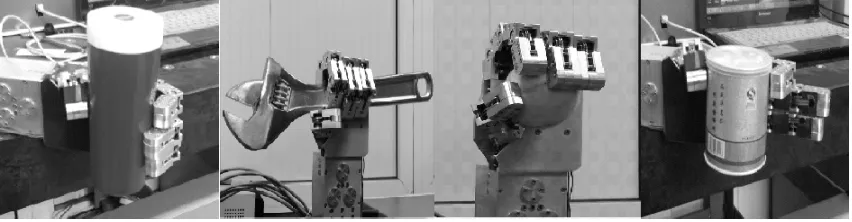
圖7 抓持效果實驗
6 結論
基于欠驅動原理設計的靈巧手系統具有明顯的優勢,根據抓持運動特性設計的復合式階梯控制系統具有工作穩定、響應迅速、可靠性高等特點,該系統充分利用了處理器性能和外設資源,軟件采用了模塊化思想,近似最優抓持規劃問題應用了遺傳算法,降低了系統復雜度,有效提高了靈巧手指節運動效率。通過相關抓持物體測試實驗,說明了該系統能夠滿足欠驅動靈巧手抓持運動的控制要求。
[1]KRAGTEN Gert A,HERDER JUST L.The Ability of Underactuated Hands to Grasp and Hold Objects[J].Mechanism and Machine Theory,2010,45(3):408-425.
[2]PETKOVIC'D,PAVLOVIC'N D,C'OJBA?IC'?,et al.Adaptive Neuro Fuzzy Estimation of Underactuated Robotic Gripper Contact Forces[J].Expert Systems with Application,2013,40(1):281-286.
[3]欒楠,明愛國,趙錫芳,等.欠驅動機器人的最優軌道生成與實現[J].上海交通大學學報,2002,36(10):1442-1425.
[4]MATRONE G C,CIPRIANI C,SECCO E L,et al.Principal Components Analysis Based Control of a Multi-dof Underactuated Prosthetic Hand[J].Journal of Neuro Engineering and Rehabilitation,2010,7(1):16.
[5]ZOLLOL,ROCCELLA S,GUGLIELMELLI E,et al.Biomechatronic Design and Control of an Anthropomorphic Artificial Hand for Prosthetic and Robotic Applications[J].IEEE/ASME Transactions on Mechatronics,2007,12(4):418-429.
[6]YANG Dapeng,LIU Hong,GV Y,et al.An Anthropomorphic Robot Hand Developed Based on Underactuated Mechanism and Controlled by EMG Signals[J].Journal of Bionic Engineering,2009,6(3):255-263.
[7]劉慶波,余躍慶,王浩.基于遺傳算法的欠驅動機器人運動規劃[J].控制工程,2008,15(1):64-67.
[8]王書鋒,鄒益仁.車間作業調度(JSSP)技術問題簡明綜述[J].系統工程理論與實踐,2003(1):49-55.
[9]LIPPIELLO V,SICILIANO B,VILLANI L.Multi-fingered Grasp Synthesis Based on the Object Dynamic Properties[J].Robotics and Autonomous Systems,2013,61(6):626-636.
[10]謝勝利,黃強,董金.求解JSP的遺傳算法中不可行調度的方案[J].計算機集成制造系統,2002(11):902-906.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00

- 機床與液壓的其它文章
- Manufacturing of self-lubricating diamond tools with Ni-Cr alloy adding with Ni/C
- Vibration response analysis of a lathe spindle by using the ANSYS finite element method
- Car following model with consideration of the vehicle’s mechanical inertia effect and its stability analysis
- Software design for spur gear tooth thickness based on MATLAB/GUI
- Dynamic study on ultrasonic horn
- Analysis and research of OPC technology in coal mine monitoring data transmission system