名優茶并聯采摘機器人的結構設計與工作空間分析
2015-04-26 08:24:06高鳳陳勇
機床與液壓 2015年3期
高鳳,陳勇
(南京林業大學機械電子工程學院,江蘇南京 210037)
0 前言
隨著農村勞動力緊缺,采茶人工荒已經成為制約茶產業可持續發展的瓶頸。每年有30%~40%的春茶不能及時采摘。現有的采茶機基于切割式工作原理,工作效率高,但是對新梢與老葉沒有選擇性,只能用于大宗茶采摘,不能滿足高檔名優茶的采摘要求。本文作者創新性地集成主動機器視覺技術和并聯機器人技術,研究具備新梢智能識別功能的名優茶采摘機器人。
并聯機器人具有剛度大、誤差小、速度快及精度高等優點,滿足名優茶高速采摘和精準性的要求。采用閉鏈結構的并聯采茶機器人,使名優采茶高效精準自動化采摘成為可能。目前,針對并聯機器人的研究主要是運動學及動力學分析[1-2],奇異性分析[3]、優化設計[4]和工作空間分析[5-6]等。并聯機器人各單鏈之間的運動干涉限制了工作空間大小,分析工作空間成為實現機器人設計指標的關鍵手段。
1 機器人結構設計
基于Delta機器人技術和茶葉采摘技術,設計了適用于機采茶園的名優茶并聯采摘機器人,包括靜平臺、動平臺、驅動臂、執行臂和末端執行器五個部分。靜平臺放置控制系統,減少了機器人轉動慣量。動平臺安裝末端執行器,實現機器人有選擇性地高速采摘。驅動臂和執行臂通過控制系統驅動末端執行器運動。每個執行臂由4個完全相同的球鉸聯接,始終保持平行四邊形的運動特性。
圖1是機器人的工作示意圖。
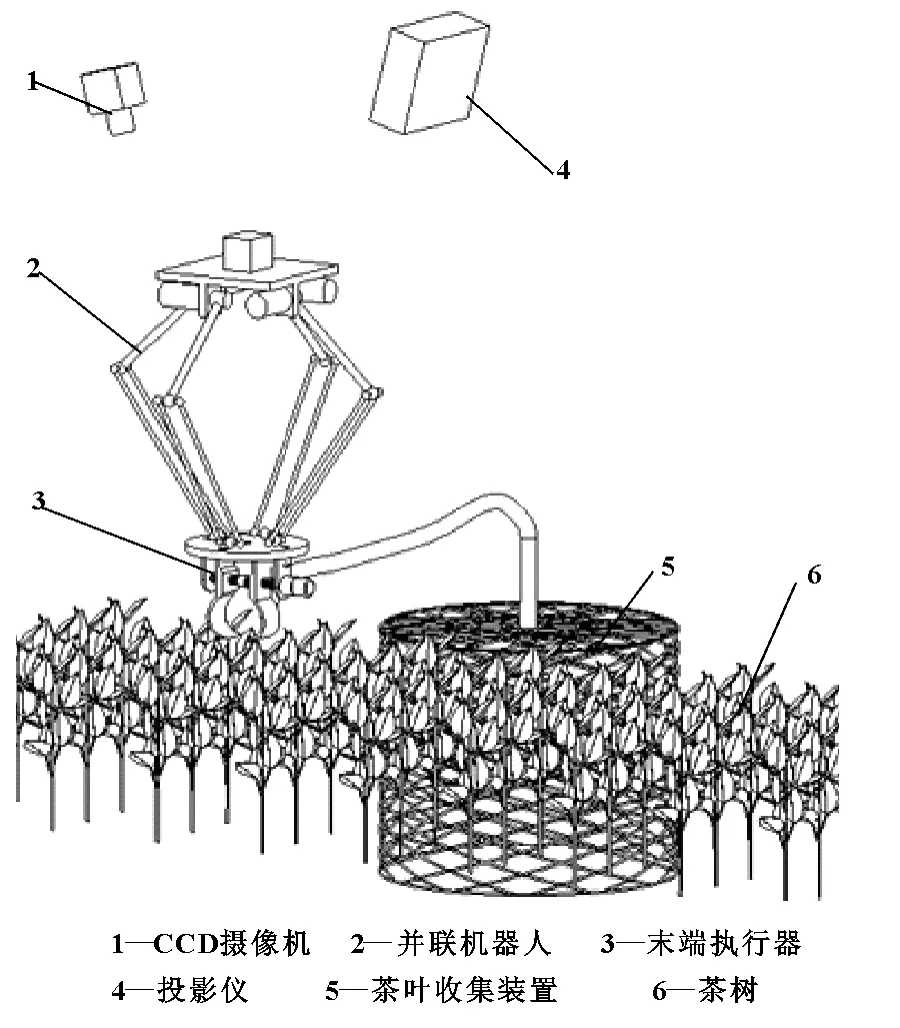
圖1 機器人工作示意圖
在該機器人采茶系統中,CCD攝像機1和投影儀4根據顏色特征和光柵投影技術實現新梢的識別、定位;控制系統驅動的并聯機構2帶動末端執行器3運動到新梢的空間位置,完成新梢的有選擇性采摘。
1.1 并聯機器人設計
由驅動臂和執行臂組成的并聯機構,決定了機器人整體尺寸及茶葉采摘工作空間的大小。因此,必需進行名優茶并聯采摘機器人尺度綜合分析。即在給定機構靈巧度范圍30°≤qi≤150°和桿件不發生干涉的前提下,利用GADS建立和求解給定工作空間的Delta機構幾何設計變量的最優化問題,求出最優臂長。
對指定工作空間Delta機構的最優尺度綜合定義如下[7]:
已知:指定工作空間體積W。
求解:工作空間包含W的Delta機構的幾何參數。
假設目標函數F(Ⅰ)具有n個參數,則最優化問題可表示為:
min F(Ⅰ)
s.t.hi(Ⅰ,P)≤0表示所有的點P都在指定的W工作空間內。

式中:Ⅰ=(x1,x2,…,xn)是未知的參數向量。每一個變量允許的變化范圍xj=[xjmin,xjmax],(j=1,2,…,n)。其中最優解用Ⅰ*表示。
通過運動學逆解分析[8],求出問題的約束條件hi(Ⅰ,P),即

上述不等式(2)描述空間的一個體積,該體積的邊界可由式hi(P)=hi(x y z)=0來確定。若用一系列特征點表示指定的工作空間W,當滿足約束條件hi(Ⅰ,Pk)≤0(i=1,2,3,4,k=1,…,Npt)時,W包含在機器人的工作空間內。
其中l和L表示驅動臂和執行臂臂長,r表示單鏈一端點距離靜平臺中心與另一端點距離動平臺中心的距離差,H表示指定工作空間到Delta機器人靜平臺的距離,角度αi描述四個電機的位置,Pi表示驅動臂在靜平臺上的安裝位置。
為了用于實驗室的初次試驗,設定一個較小的工作空間W為300 mm×300 mm×120 mm,如圖2所示,其中Npt=8。要求設計的機器人工作空間必須包含W。新梢在豎直方向上的高度差小于100 mm。
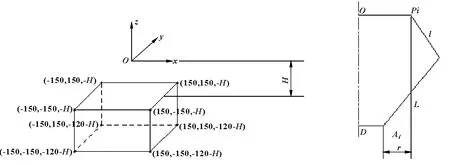
圖2 給定的工作空間
將Pk代入式(2)中,未知量為L,l,r,H,可定義相互獨立的設計變量為Ⅰ=[l,L,r,H]。計算Pk至曲面hi=0的距離,確定目標函數F(Ⅰ)。其中hi符號取決于Pk點相對于曲面的位置。因此,求解機器人尺度綜合等價于尋找一個距離Pk點最近的曲面。
優化問題的約束條件為4個hi(Ⅰ,Pk)≤0(i=1,2,…4)的曲面,因此必須求出函數F(Ⅰ,Pk)=|h1(Ⅰ,Pk)|+|h2(Ⅰ,Pk)|+|h3(Ⅰ,Pk)|+|h4(Ⅰ,Pk)|的最小值,確定問題最優解。該函數可以看作是關于點Pk的權,那么,優化的最終目標是尋找一組最小設計變量Ⅰ*=[l,L,r,H],使得Delta機器人產生的工作空間包含指定的空間W。
1.2 GADS優化
運用GADS求解機器人的最優問題,優化工具箱中的主函數為:

約束函數為:

設定參數并運行,得到計算結果:L=273.077,l=220.871,r=40.279,H=244.203。
由于遺傳算法初始種群的隨機性,每次產生的個體距最佳個體的距離不同。為求解出最優結果,通過多次調試運行,確定最終臂長。調試結果如表1所示。
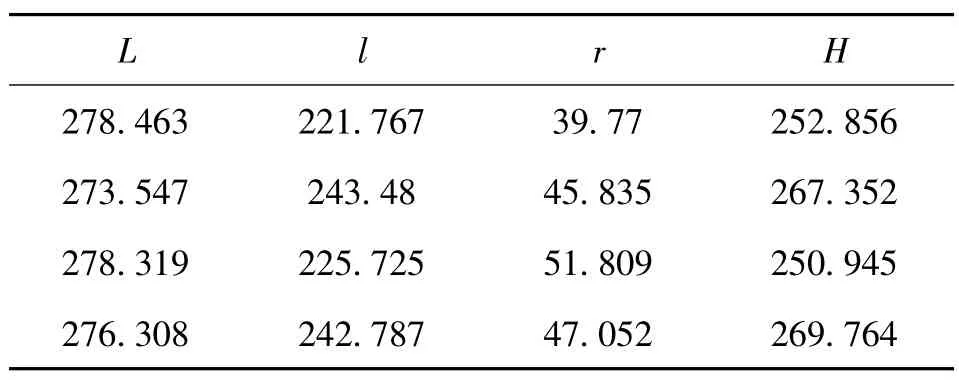
表1 MATLAB優化結果
通過多次優化計算,得出l=230 mm,L=275 mm,其中r=45 mm,H=260 mm。
2 工作空間分析
機器人工作空間是衡量機器人性能的重要指標[9]。根據并聯機構的運動特性,機器人工作空間簡化為四條完全相同的單鏈形成的四個包絡體的交集。工作空間內的點必須滿足以下兩個條件[10]:
(1)逆解方程均需有實數解,即判別式Δi≥0,(i=1,2,3,4)。
(2)求解的關節轉角qi有兩組解,需至少有一組能滿足相應的關節約束條件qmin≤qi≤qmax,(i=1,2,3,4)。
2.1 確定工作空間
利用雅克比矩陣計算得到的執行臂位置向量BiAi[8],根據BiAi=L建立約束方程:

式中
對于每一條單鏈,式(6)中qi為變量,a、d、l、αi、L為機構常量,所以式(6)表示為空間曲線的參數方程,記為R(qi)=(xi(qi),yi(qi),zi(qi))T。此處R(qi)表示垂直于xOy平面,圓心為Ni=(-(d-a)cosαi,-(d-a)sinαi,0)的圓。當qi在允許范圍內變化時,R(qi)表示一段圓弧,記為π:R(qi)。
由式(5)可知,每條單鏈的工作空間表示為一個球面,球心位于(xi,yi,zi),半徑為L。即工作空間為球心沿圓曲線連續移動形成的包絡體,軸線過Ni點的一個圓環面。但由于受驅動轉角范圍的限制,圓曲線π不是一個整圓,按式(6)求出端點的位置坐標。因此,單鏈子空間為圖3所示的一段圓環面,兩端面為球心分別在Bi1,Bi2的半球面。
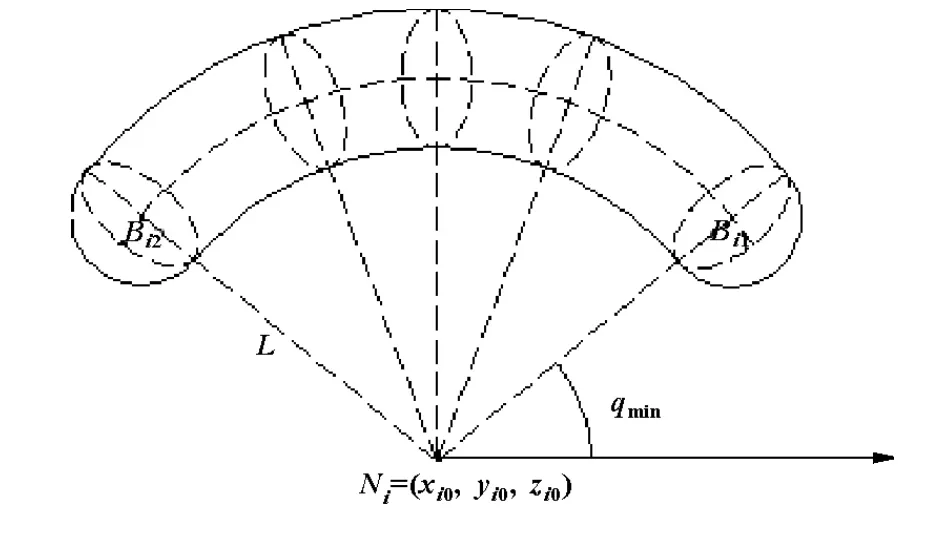
圖3 單鏈工作空間
如果Bi1Bi2≥2l,則子空間內部沒有空洞;如果Bi1Bi2≤2l,則子空間兩邊界球體相交,其交集{P(x,y,z),|P-Bi1|≤l}和{P(x,y,z),|P-Bi2|≤l}為動平臺參考點不可到達的子空間區域,子空間內存在空洞,空洞邊界為兩球的相交部分[11]。根據給定驅動角的轉動范圍30°≤qi≤150°,通過幾何計算得Bi1Bi2=476≥2l,即采茶機器人的工作空間中沒有空洞。
2.2 工作空間極值計算
利用一系列平行于xOy的平面,將工作空間分割成厚度為Δz的微分子空間。鑒于并聯機構的對稱性,工作空間的最低截面z=zmin與最高截面z=zmax必然出現在x=0,y=0的位置。令x=0,y=0,對z軸方向進行一維搜索。
給定迭代初始值z0、z1,確保z1位于工作空間之內,z0位于工作空間之外。為確保z0絕對位于工作空間之外,將z0取得足夠小。不斷重復以下步驟,直到dz=z1-z0≤ε,ε為迭代精度。
令z=(z0+z1)/2,如果(x=0,y=0,z)為工作空間內的點,即滿足機器人工作空間內的點要求的兩個條件,取z1=z,否則取z0=z,由于每次迭代dz嚴格遞減,搜索結果逐漸收斂于zmin。同理,求解zmax。
通過上述方法,利用MATLAB計算出zmin≈-503 mm、zmax≈-165 mm。
2.3 工作空間邊界搜索
進行機器人工作空間邊界搜索時,假設微分子空間為圓柱體。按照機器人工作空間內的點滿足的約束條件,依次進行邊界搜索。為保證搜索的精確性及完整性,起點z0應從比工作空間最低點zmin更低的位置開始,如圖4所示。搜索完成后,再分析沿z軸方向增量為Δz的子空間,直到z=zmax為止。
子空間邊界由圖5所示的快速極坐標搜索法確定,工作空間內的點用極坐標表示。起始角由θ0開始,極徑ρ0從0遞增直至ρmax,當機構關節轉角參數滿足下列約束條件之一時,搜索停止并記錄該極徑ρ0。
qi1>q1max或qi1<q1min,qi2>q2max或qi2<q2min,qi3>q3max或qi3<q3min(i=1,2,3,4)。
以Δθ為增量,重復上述計算,完成微分子空間邊界點的搜索,其體積可用式(7)計算。

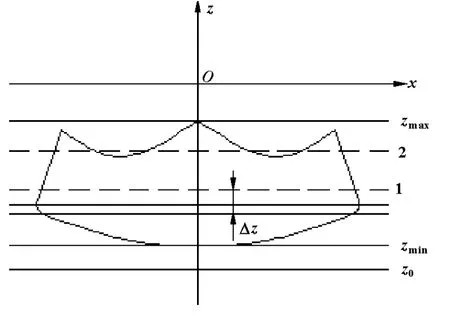
圖4 工作空間微分子空間
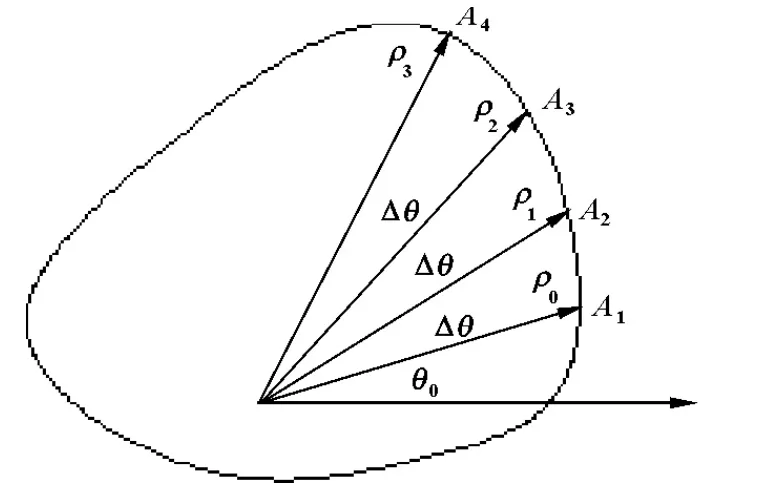
圖5 工作空間極坐標搜索圖
以Δz為增量,重復上述步驟,所求的機器人工作空間體積V等于各微分子空間的體積之和。
通過上述工作空間的計算,利用MATLAB中plot命令繪制圖6所示空間三維圖。
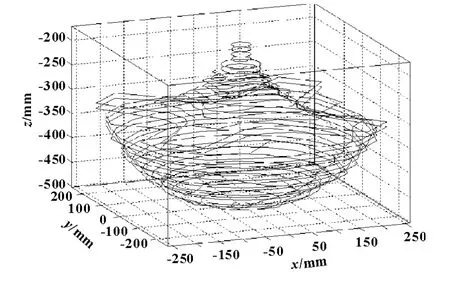
圖6 名優茶并聯采摘機器人工作空間
由圖6可看出,名優茶并聯采摘機器人的工作空間滿足設計要求。以此為依據,制造了圖7所示的機器人物理樣機模型。
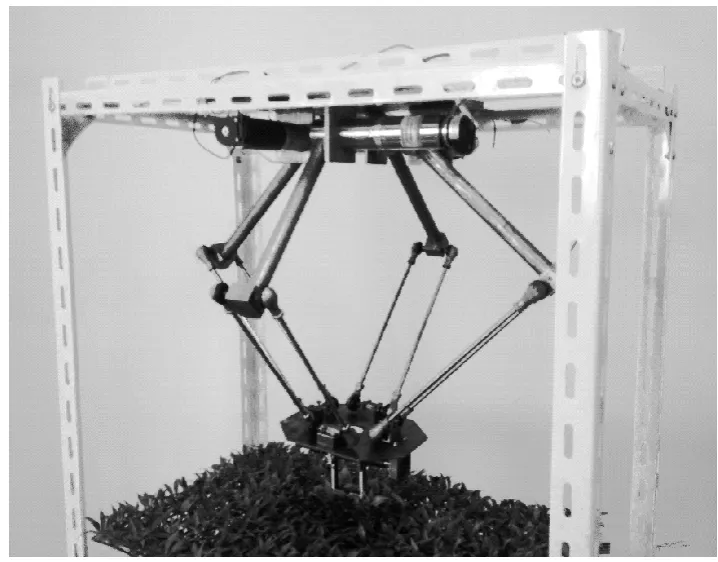
圖7 機器人物理樣機
3 結束語
完成了名優茶并聯采摘機器人的結構設計,建立了機器人物理樣機模型。在運動學逆解的基礎上,采用GADS優化工具箱,確定了機器人臂長尺寸。結合數值法和幾何法,利用快速極坐標搜索法計算出機器人工作空間的邊界,并在MATLAB中繪制出三維圖,驗證了機器人滿足設計的需求。
[1]STEFAN S.Inverse Dynamics of the 3-PRR Planar Parallel Robot[J].Robotics and Autonomous Systems,2009,57(5):556-563.
[2]劉宏偉,馬質璞.3-RPS并聯機構運動學分析及仿真[J].機械設計與制造,2012,50(1):211-213.
[3]HORIN PB,SHOHAM M.A Class of Parallel Robots Practically Free of Parallel Singularities[J].Journal of Mechanical Design,2008,130(5):052303-052311.
[4]王冰,陳久川.平面并聯平動機器人尺寸設計研究[J].機床與液壓,2007,35(9):37-41.
[5]ALTUZARRA O,AGINAGA J,HERNANDEZ A,et al.Workspace Analysis of Positioning Discontinuities Due to Clearances in Parallel Manipulators[J].Mechanism and Machine Theory,2011,46(5):577-592.
[6]尹小琴,馬履中.三平移并聯機構3-RRC的工作空間分析[J].中國機械工程,2003,14(18):1531-1533.
[7]LARIBI M A,ROMDHANE L,ZEGHLOUL S.Analysis and Dimensional Synthesis of the DELTA Robot for a Prescribed Workspace[J].Mechanism and Machine Theory,2007,42(7):859-870.
[8]高鳳.名優茶并聯采摘機器人結構設計與仿真[D].南京:南京林業大學,2013.
[9]KUMAR V.Characterization of Workspaces of Parallel Manipulators[J].Journal of Mechanical Design,1992,114(3):368-375.
[10]許敏.改進的Delta型并聯機器人機構運動性能研究[D].沈陽:東北大學,2007.
[11]王霄,韓亞峰,林躍強,等.Delta型并聯運動激光切割機床的工作空間分析[J].農業機械學報,2007,38(1):154-157,126.

- 機床與液壓的其它文章
- Manufacturing of self-lubricating diamond tools with Ni-Cr alloy adding with Ni/C
- Vibration response analysis of a lathe spindle by using the ANSYS finite element method
- Car following model with consideration of the vehicle’s mechanical inertia effect and its stability analysis
- Software design for spur gear tooth thickness based on MATLAB/GUI
- Dynamic study on ultrasonic horn
- Analysis and research of OPC technology in coal mine monitoring data transmission system