五自由度并聯(lián)機(jī)器人機(jī)構(gòu)運(yùn)動(dòng)性能優(yōu)化研究
2015-04-26 08:24:16李瑞霞
機(jī)床與液壓 2015年3期
關(guān)鍵詞:優(yōu)化
李瑞霞
(長(zhǎng)治醫(yī)學(xué)院生物醫(yī)學(xué)工程系,山西長(zhǎng)治 046000)
0 前言
并聯(lián)機(jī)構(gòu)由于其本身具有的諸多優(yōu)點(diǎn),如剛度高、承載能力強(qiáng)、動(dòng)態(tài)性能好、速度快和結(jié)構(gòu)簡(jiǎn)單等,受到了國(guó)際學(xué)術(shù)界和工程界的廣泛重視[1-2]。陳修龍等[3]對(duì)4-UPS-UPU并聯(lián)式坐標(biāo)測(cè)量機(jī)的靈巧度從7個(gè)性能指標(biāo)進(jìn)行了研究,齊明[4]對(duì)4-UPS/UPU 5自由度并聯(lián)機(jī)構(gòu)進(jìn)行了分析,提出給定工作空間使其操作性能最優(yōu)的尺度綜合方法,吳文強(qiáng)等[5]對(duì)串聯(lián)機(jī)器人的性能指標(biāo)進(jìn)行了優(yōu)化分析,Tao等[6]對(duì)三轉(zhuǎn)動(dòng)并聯(lián)機(jī)構(gòu)進(jìn)行了性能指標(biāo)優(yōu)化分析,對(duì)于對(duì)立的性能指標(biāo)提出加權(quán)因子,李明磊等[7]提出了基于差異演化算法對(duì)并聯(lián)機(jī)構(gòu)進(jìn)行結(jié)構(gòu)優(yōu)化。
本文作者以一種可實(shí)現(xiàn)5自由度的4-UPS-UPU并聯(lián)機(jī)器人機(jī)構(gòu)為研究對(duì)象,建立其運(yùn)動(dòng)學(xué)模型及雅克比矩陣,考慮機(jī)構(gòu)在運(yùn)動(dòng)空間內(nèi)的運(yùn)動(dòng)學(xué)性能,引入全域條件指標(biāo)和全域梯度指標(biāo)為優(yōu)化目標(biāo),基于多學(xué)科設(shè)計(jì)優(yōu)化軟件Modefrontier對(duì)機(jī)構(gòu)進(jìn)行了多目標(biāo)優(yōu)化研究。采用柱坐標(biāo)極限搜索法求解機(jī)構(gòu)工作空間,通過(guò)求解其全域條件指標(biāo)的近似值,得到優(yōu)化目標(biāo)的數(shù)學(xué)模型;采用實(shí)驗(yàn)設(shè)計(jì)和粒子群優(yōu)化算法對(duì)機(jī)構(gòu)進(jìn)行了優(yōu)化求解,求得最優(yōu)Pareto解,對(duì)優(yōu)化前后的運(yùn)動(dòng)性能進(jìn)行了比較分析,為并聯(lián)機(jī)構(gòu)多目標(biāo)優(yōu)化設(shè)計(jì)提供參考依據(jù)。
1 4-UPS-UPU并聯(lián)機(jī)構(gòu)模型
1.1 并聯(lián)機(jī)構(gòu)描述
4-UPS-UPU并聯(lián)機(jī)構(gòu)的模型及坐標(biāo)系的建立如圖1所示,該機(jī)構(gòu)由動(dòng)平臺(tái)、定平臺(tái)及連接動(dòng)平臺(tái)和定平臺(tái)的4條完全相同的驅(qū)動(dòng)支鏈UPS以及1條驅(qū)動(dòng)支鏈UPU組成。4個(gè)完全相同的驅(qū)動(dòng)支鏈由1個(gè)虎克鉸,1個(gè)移動(dòng)副和1個(gè)球鉸按照U-P-S的順序連接而成。另一驅(qū)動(dòng)支鏈由一個(gè)移動(dòng)副和兩個(gè)虎克鉸按照U-P-U的順序連接而成[8]。
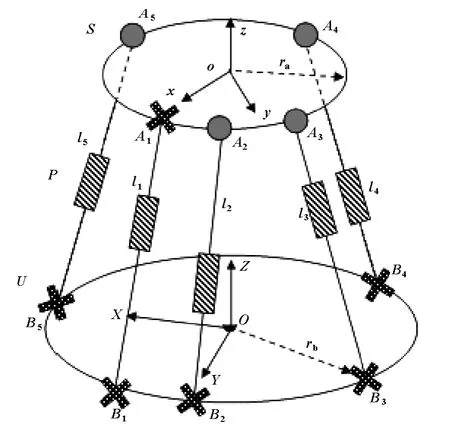
圖1 4-UPS-UPU并聯(lián)機(jī)構(gòu)簡(jiǎn)圖
以該并聯(lián)機(jī)構(gòu)的動(dòng)靜平臺(tái)的幾何中心o、O為原點(diǎn),分別建立機(jī)構(gòu)的相對(duì)坐標(biāo)系o-xyz和參考坐標(biāo)系O-XYZ,動(dòng)平臺(tái)外接圓半徑為ra,x軸指向點(diǎn)A1,鉸點(diǎn)Ai在動(dòng)平臺(tái)圓周上均勻分布,z軸垂直于動(dòng)平臺(tái)方向向上,y軸正方向按右手定則給定;靜平臺(tái)外接圓的半徑為rb,X軸指向B5,B1與X軸正向夾角為45°,其余4個(gè)虎克鉸相距90°均勻分布,Z軸垂直于定平臺(tái)方向向上,Y軸由右手螺旋定則給定。
1.2 自由度的計(jì)算
根據(jù)傳統(tǒng)的自由度求解公式

式中:F為機(jī)構(gòu)的自由度,n為構(gòu)件數(shù),g為運(yùn)動(dòng)副數(shù),fi為第i個(gè)運(yùn)動(dòng)副的自由度數(shù)。d為機(jī)構(gòu)的階數(shù),當(dāng)機(jī)構(gòu)為空間機(jī)構(gòu)時(shí),式中的d=6。球副的自由度為3,虎克鉸的自由度為2,移動(dòng)副的自由度為1。該機(jī)構(gòu)中,則F=5。即動(dòng)平臺(tái)具有X軸、Y軸、Z軸移動(dòng)的自由度以及繞X軸、Y軸轉(zhuǎn)動(dòng)的自由度。
1.3 機(jī)構(gòu)位置分析
動(dòng)平臺(tái)鉸點(diǎn)Ai在相對(duì)坐標(biāo)系oxyz和參考坐標(biāo)系OXYZ下的矢量坐標(biāo)可以表示為(Aix,Aiy,Aiz)T和(AiX,AiY,AiZ)T。
靜平臺(tái)鉸點(diǎn)Bi在相對(duì)坐標(biāo)系O-XYZ下的坐標(biāo)為(BiX,BiY,BiZ)T。
點(diǎn)Ai從坐標(biāo)系o-xyz轉(zhuǎn)換到坐標(biāo)系O-XYZ下表示為

式中:P=[x y z]T表示相對(duì)坐標(biāo)系o-xyz原點(diǎn)在定坐標(biāo)系下的位置矢量,根據(jù)RPY變換理論,可得旋轉(zhuǎn)矩陣Q為
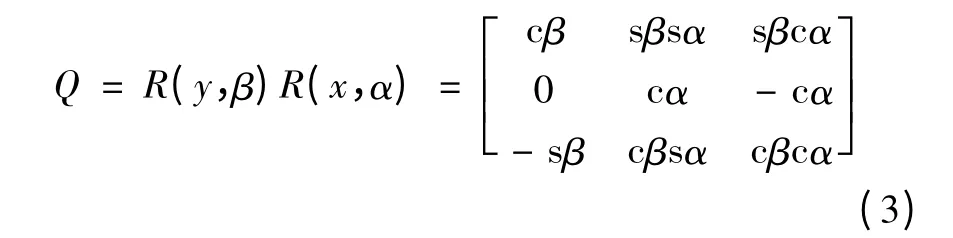
式中:sβ=sinβ,cβ=cosβ,其余類似。
驅(qū)動(dòng)桿的長(zhǎng)度矢量表達(dá)式為

則驅(qū)動(dòng)桿的長(zhǎng)度li為

若已知?jiǎng)悠脚_(tái)的位姿,即可求出各連桿長(zhǎng)度,即運(yùn)動(dòng)學(xué)逆解。
1.4 雅可比矩陣分析
對(duì)于并聯(lián)機(jī)構(gòu)4-UPS-UPU,雅可比矩陣反映驅(qū)動(dòng)關(guān)節(jié)速度與動(dòng)平臺(tái)速度之間的映射關(guān)系。設(shè)動(dòng)平臺(tái)o點(diǎn)的線速度,動(dòng)平臺(tái)的角速度ω=,鉸點(diǎn)Ai的速度可表示為

則第i條支鏈的驅(qū)動(dòng)速度l·
i可表示為

其中si為驅(qū)動(dòng)支鏈的單位向量

把式(6)代入式(7)中,得

則并聯(lián)機(jī)構(gòu)的雅可比矩陣為

2 機(jī)構(gòu)運(yùn)動(dòng)性能指標(biāo)的建立
2.1 全域條件指標(biāo)

Gosseli[9-10]提出了全域條件指標(biāo),能夠評(píng)估機(jī)構(gòu)在整個(gè)工作空間上的運(yùn)動(dòng)性能,公式定義為其中ν為局部條件數(shù),ν=1/κ(J),κ(J)為雅可比條件數(shù),κ(J)=‖J‖·‖J-1‖,‖·‖為矩陣的譜范數(shù),W為工作空間。
全域條件數(shù)越大,說(shuō)明整個(gè)工作空間的靈巧度越佳,因此,應(yīng)使優(yōu)化目標(biāo)GCⅠ處于最大化。
2.2 全域梯度指標(biāo)
F A LARA-MOLINA[11-12]提出了全域梯度指標(biāo),它代表局部條件數(shù)的波動(dòng)情況,定義為

其中局部條件數(shù)的梯度可以表示為

GPⅠ近似等于整個(gè)工作空間下局部梯度的最大值,若梯度越小,說(shuō)明整個(gè)工作空間的靈巧度波動(dòng)性越小。于是,希望全域梯度指標(biāo)取最小。
2.3 工作空間求解
為了求解全域條件指標(biāo)和全域梯度指標(biāo),需要求解該并聯(lián)機(jī)構(gòu)的工作空間。本文采用柱坐標(biāo)極限搜索法對(duì)4UPS-UPU并聯(lián)機(jī)構(gòu)定位姿(α=0,β=0)下位置工作空間求解。通過(guò)搜索空間中動(dòng)平臺(tái)參考點(diǎn)的位置對(duì)應(yīng)的桿長(zhǎng)和運(yùn)動(dòng)副轉(zhuǎn)角以及奇異性判斷是否符合限制條件,判斷該位置點(diǎn)是否在工作空間內(nèi)。搜索工作空間的流程圖見圖2。
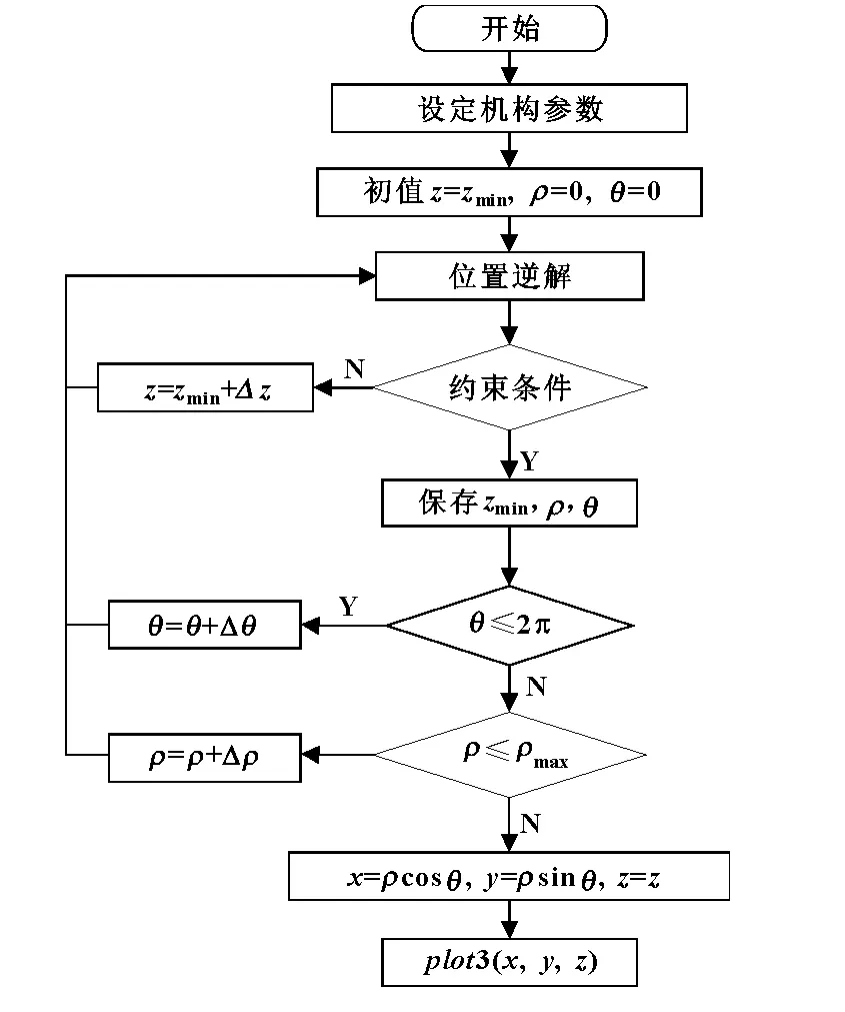
圖2 并聯(lián)機(jī)構(gòu)工作空間搜索流程圖
具體的步驟為:
(1)將工作空間用平行于XY平面的的平面簇將Z軸分成n等份,沿Z軸以步長(zhǎng)為Δz的子空間從Zmin到Zmax進(jìn)行搜索;
(2)每一子空間z'內(nèi),采用柱坐標(biāo)確定子空間,動(dòng)平臺(tái)參考點(diǎn)o在參考坐標(biāo)系下的坐標(biāo)為(ρcosθ,ρsinθ,z)。極角θ從0到2π以步長(zhǎng)為Δθ=2π/100搜索,極徑從ρ=0以步長(zhǎng)Δρ=0.01 m搜索至ρmax=0.5 m。
(3)在搜索過(guò)程中,判斷動(dòng)平臺(tái)參考點(diǎn)是否滿足約束條件。如果機(jī)構(gòu)滿足約束條件且至少有一個(gè)取等號(hào),則該點(diǎn)為工作空間的邊界點(diǎn),從而得到每個(gè)截面上的邊界線,最終由邊界線描繪出工作空間的三維輪廓;
(4)將柱坐標(biāo)系下的ρ、θ轉(zhuǎn)化到笛卡爾坐標(biāo)系下,x=ρcosθ,y=ρsinθ。用坐標(biāo)(x,y,z)表示,Matlab繪制機(jī)構(gòu)工作空間的三維圖形。
機(jī)構(gòu)參數(shù)初始值見表1。

表1 機(jī)構(gòu)參數(shù)表
借助MATLAB軟件編寫工作空間程序,可求得機(jī)構(gòu)的三維工作空間,如圖3所示。
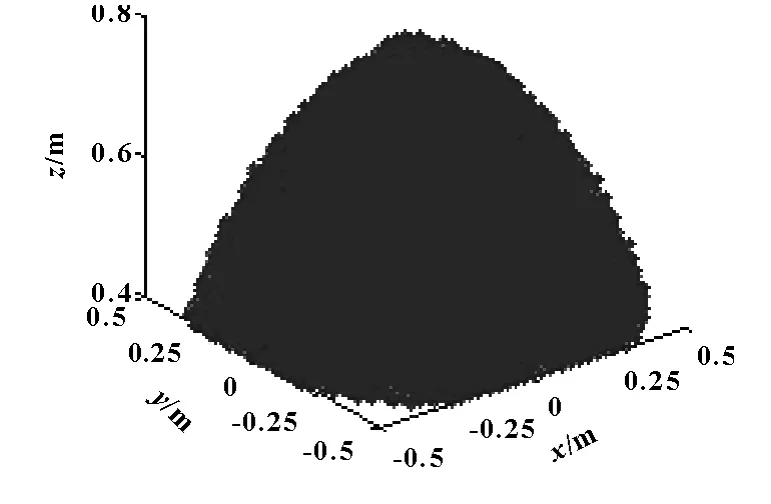
圖3 4-UPS-UPU并聯(lián)機(jī)構(gòu)的工作空間
3 優(yōu)化模型的建立
選擇該并聯(lián)機(jī)構(gòu)的結(jié)構(gòu)參數(shù)lmin=0.4為固定值,ra、rb、lmax作為設(shè)計(jì)變量;優(yōu)化目標(biāo)為機(jī)構(gòu)的全域條件指標(biāo)GCⅠ和全域梯度指標(biāo)GGⅠ,則機(jī)構(gòu)的多目標(biāo)優(yōu)化模型為
4 優(yōu)化結(jié)果分析
Modefrontier集成MATLAB,采用實(shí)驗(yàn)設(shè)計(jì)、優(yōu)化算法來(lái)求解GCⅠ的最大值和GPⅠ的最小值。實(shí)驗(yàn)設(shè)計(jì)采用最優(yōu)拉丁超立方設(shè)計(jì),粒子群優(yōu)化算法參數(shù)配置如下[13]:粒子種群大小為40,粒子個(gè)數(shù)設(shè)為10,慣性權(quán)重為0.9,全局增量為0.9,粒子增量為0.9,決定在當(dāng)前位置與最好位置之間的區(qū)域分辨率的最大速度為0.1,運(yùn)行失敗的罰值為1030,運(yùn)行失敗的目標(biāo)值為1030。任務(wù)組合流程圖如圖4所示。
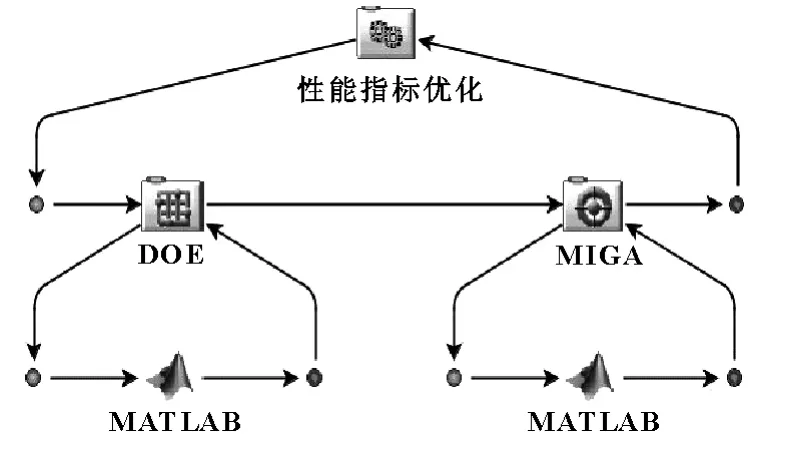
圖4 Modefrontier多目標(biāo)優(yōu)化任務(wù)流程圖
Modefrontier在進(jìn)行多目標(biāo)優(yōu)化過(guò)程中,實(shí)驗(yàn)設(shè)計(jì)會(huì)對(duì)優(yōu)化模型進(jìn)行計(jì)算,并剔除不符合約束條件的值,滿足約束條件的值會(huì)進(jìn)入優(yōu)化環(huán)節(jié),進(jìn)行多目標(biāo)優(yōu)化求解,多次遺傳迭代后可得到全域條件性能指標(biāo)和全域梯度指標(biāo)的Pareto解集,如圖5所示。

圖5 全域性能指標(biāo)的Pareto解集
設(shè)計(jì)變量對(duì)性能指標(biāo)的影響如圖6、7所示。

圖6 ra、rb對(duì)全域條件指標(biāo)的影響圖
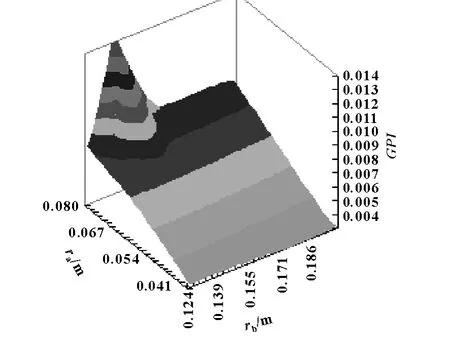
圖7 ra、rb對(duì)全域梯度指標(biāo)的影響圖
從圖5可以看出,全域條件指標(biāo)和全域梯度指標(biāo)是近似正相關(guān),這是兩個(gè)相互沖突的指標(biāo),增大GCⅠ的同時(shí)也會(huì)增大GPⅠ。從圖6和圖7可以看出,隨著設(shè)計(jì)變量的增大,性能指數(shù)也在增加,因此,需要設(shè)計(jì)者從Pareto解中選擇符合要求的解。
選擇P點(diǎn)作為可行解,比較優(yōu)化前后目標(biāo)函數(shù)變化情況,見表2。

表2 設(shè)計(jì)變量與性能指標(biāo)優(yōu)化前后結(jié)果比較
優(yōu)化前GCⅠ=0.093,GPⅠ=0.9×10-2;優(yōu)化后GCⅠ=0.122,GGⅠ=0.97×10-2,全域條件指標(biāo)增大了30%,而全域梯度指標(biāo)僅僅增大7%。
多目標(biāo)優(yōu)化不同于單目標(biāo)優(yōu)化,并不是獲取一個(gè)目標(biāo)的最優(yōu)解,由于多目標(biāo)函數(shù)的相互沖突,使得Pareto解未必占優(yōu)。但如果單純優(yōu)化一個(gè)目標(biāo),就會(huì)使得其他性能很差。因此,同時(shí)對(duì)多個(gè)性能指標(biāo)進(jìn)行優(yōu)化設(shè)計(jì)時(shí),需要決策者權(quán)衡滿足不同要求的優(yōu)化結(jié)果,合理選取設(shè)計(jì)參數(shù)的值。
5 結(jié)論
(1)以一種可實(shí)現(xiàn)5自由度的4-UPS-UPU并聯(lián)機(jī)器人機(jī)構(gòu)為研究對(duì)象,建立其運(yùn)動(dòng)學(xué)模型及雅克比矩陣,考慮機(jī)構(gòu)在運(yùn)動(dòng)空間內(nèi)的運(yùn)動(dòng)學(xué)性能,并引入全域條件指標(biāo)和全域梯度指標(biāo)作為運(yùn)動(dòng)靈巧度的評(píng)價(jià)指標(biāo);
(2)采用柱坐標(biāo)邊界極限搜索法求解工作空間的方法,求解了全域條件指標(biāo)的數(shù)學(xué)模型;在建立優(yōu)化目標(biāo)、選擇設(shè)計(jì)變量、確定優(yōu)化目標(biāo)的基礎(chǔ)上,構(gòu)建了4-UPS-UPU機(jī)構(gòu)運(yùn)動(dòng)靈巧度多目標(biāo)優(yōu)化模型;
(3)基于多學(xué)科設(shè)計(jì)優(yōu)化軟件Modefrontier對(duì)機(jī)構(gòu)進(jìn)行了多目標(biāo)優(yōu)化研究,采用實(shí)驗(yàn)設(shè)計(jì)和粒子群優(yōu)化算法對(duì)機(jī)構(gòu)進(jìn)行了優(yōu)化,求得Pareto解,并從多組解中合理選擇了最優(yōu)解,并合理確定了結(jié)構(gòu)參數(shù)和優(yōu)化參數(shù),通過(guò)優(yōu)化前后結(jié)果比較,機(jī)構(gòu)運(yùn)動(dòng)性能得到增強(qiáng),該文為并聯(lián)機(jī)構(gòu)優(yōu)化設(shè)計(jì)提供參考依據(jù)。
[1]PLITEA Nicolae,SZILAGHYI Andras,PISLA Doina.Kinematic Analysis of a New 5-DOF Modular Parallel Robot for Brachytherapy[J].Robotics and Computer-Integrated Manufacturing,2015,31:70-80.
[2]LI Yangming,XU Qingsong.Kinematics and Inverse Dynamics Analysis for a General 3-RPS Spatial Parallel Mechanism[J].Robotics,2005,23:219-229.
[3]陳修龍,高慶,趙永生.4-UPS-UPU并聯(lián)式坐標(biāo)測(cè)量機(jī)的靈巧度研究[J].計(jì)算機(jī)集成制造系統(tǒng),2012,18(6):1200-1208.
[4]齊明.4-UPS/UPU5自由度并聯(lián)機(jī)構(gòu)尺度綜合方法[J].哈爾濱工業(yè)大學(xué)學(xué)報(bào),2009,11(41):160-164.
[5]WU Wenqiang,GUAN Yisheng,LI Huaizhu,et al.Performance Analysis and Optimization of Serial Robots[C].Proceeding of the 2012 IEEE international Conference on Robotics and Biomimetics,2012.
[6]SUN Tao,SONG Yiming,DONG Gang.Optimal Design of a Parallel Mechanism with Three Rotational Degree of Freedom[J].Robotics and Computer-Integrated Manufacturing,2012,28(4):500-508.
[7]李明磊,賈育秦,張學(xué)良,等.基于多目標(biāo)差異演化算法的并聯(lián)機(jī)構(gòu)結(jié)構(gòu)優(yōu)化[J].中國(guó)機(jī)械工程,2010,21(16):1915-1920.
[8]陳修龍,賈帥帥,鄧昱,等.新型4-UPS-UPU并聯(lián)坐標(biāo)測(cè)量機(jī)剛?cè)狁詈蟿?dòng)力學(xué)性態(tài)[J].吉林大學(xué)學(xué)報(bào):工學(xué)版,2011,41(4):1020-1024.
[9]GHOMMEM M,HAJJM R,MOOK D T B,et al.Global-Local Optimization of Flapping Kinematics in Hovering Flight[J].International Journal of Micro Air Vehicles,2013,5(2):109-126.
[10]張彥斌,張海軍,吳鑫.新型純移動(dòng)并聯(lián)機(jī)構(gòu)的運(yùn)動(dòng)學(xué)和靈巧性分析[J].機(jī)床與液壓,2010,38(15):13-16.
[11]LARA-MOLINA F A,ROSARIO J M,et al.Multi-Objective Design of Parallel Manipulator Using Global Indices[J].The Open Mechanical Engineering Journal,2010,4:37-47.
[12]CUI Guohua,ZHANG Haiqiang,XU Feng,et al.Kinematics Dexterity Analysis and Optimization of 4-UPS-UPU Parallel Robot Manipulator[C].Intelligent Robotics and Applications Lecture Notes in Computer Science,2014.
[13]JAMSHID Aghaei,KASHEM M Muttaqi,ALI Azizivahed,et al.Distribution Expansion Planning Considering Reliability and Security of Energy Using Modified PSO(Particle Swarm Optimization)algorithm[J].Energy,2014,65:398-411.
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45

- 機(jī)床與液壓的其它文章
- Manufacturing of self-lubricating diamond tools with Ni-Cr alloy adding with Ni/C
- Vibration response analysis of a lathe spindle by using the ANSYS finite element method
- Car following model with consideration of the vehicle’s mechanical inertia effect and its stability analysis
- Software design for spur gear tooth thickness based on MATLAB/GUI
- Dynamic study on ultrasonic horn
- Analysis and research of OPC technology in coal mine monitoring data transmission system