基于SolidWorks&SimMechanics對3-UPU并聯機器人運動學仿真及控制
2015-04-26 08:23:10宋馬軍陳健偉張榮興朱城偉
機床與液壓 2015年21期
宋馬軍,陳健偉,張榮興,朱城偉
(江西理工大學機電工程學院,江西贛州 341000)
0 前言
少自由度并聯機構具有高剛度、高精度、高靈活性、高承載能力等優點,一定程度上改善了六自由度并聯機構工作空間小、運動支鏈多、生產成本高等缺點[1-2]。其中,三自由度并聯機構具備了少自由度并聯機構的優點且控制相對容易,在各領域中具有廣泛的應用價值和潛力。HUNT[3]于1983年提出的3-RPS并聯機器人得到了廣泛的應用,黃真等[4]對3-RPS并聯機器人的位置、運動和受力進行了研究,LI等[5]對3-UPU并聯機構的瞬時運動學性能進行了分析。SimMechanics是Matlab中的機構系統模塊集,它可用各種運動副和剛體組合進行機構的建模和仿真,為多體動力機械系統及控制系統提供了正向動力學分析、逆向動力學分析、運動學分析、線性化分析等。利用SimMechanics工具進行機構建模仿真不需要建立數學模型和編程,即可實現實時分析和機構運動狀態的模擬顯示。但SimMechanics對復雜模型裝配體的直接建模工作量大和出錯率高,模型中坐標系的設定難度大和數據計算繁瑣等缺點。基于模型轉換接口技術提高了復雜模型的建模仿真的工作效率,降低了建模出錯率,在建模仿真中基本不需要對數據的計算。
PID控制因算法比較簡單、控制一般可建立精確數學模型的系統可靠性高、原理簡單、魯棒性好和能達到理想的控制效果等優點,已被廣泛應用于各個領域的工業生產中[6]。但由于它是一種線性結構的控制,而對于非線性、不確定性系統,如對于并聯機器人想要實現理想的控制效果較難。模糊控制是以模糊語言變量、模糊邏輯推理及模糊集合為基礎,由論域映射到論域的非線性控制,屬于智能控制算法的一種。它具有被控對象不需要有精確的數學模型、易于接受、魯棒性和適應性好等優點[7]。
本文作者利用螺旋理論對3-UPU并聯機構實現純平動的構型進行了分析,該構型的特點是同支鏈兩個虎克副中,兩個內側的轉動軸心和兩個外側的轉動軸心均相互平行。運用SolidWorks&SimMechanics模型轉換接口技術對3-UPU并聯機構的運動特性仿真,大大地提高了SimMechanics模塊對于復雜實體仿真建模的準確性,避免大量數據的計算,提高了操作效率。基于Matlab語言對傳統PID控制系統和模糊PID控制系統的性能及3-UPU并聯機構的控制對比。
1 3-UPU型并聯機構運動特性分析
如圖1所示,3-UPU并聯機構由兩個相似的正三角形平臺和三條相互獨立的支鏈組成,每條支鏈由兩個虎克副和一個移動副所組成。坐標系O-XYZ和坐標系o-xyz分別固結于定、動平臺中心處。定、動平臺外接圓半徑分別為R=100 mm和r=50 mm。初始位置時,動平臺中心相對于定坐標為zp=。
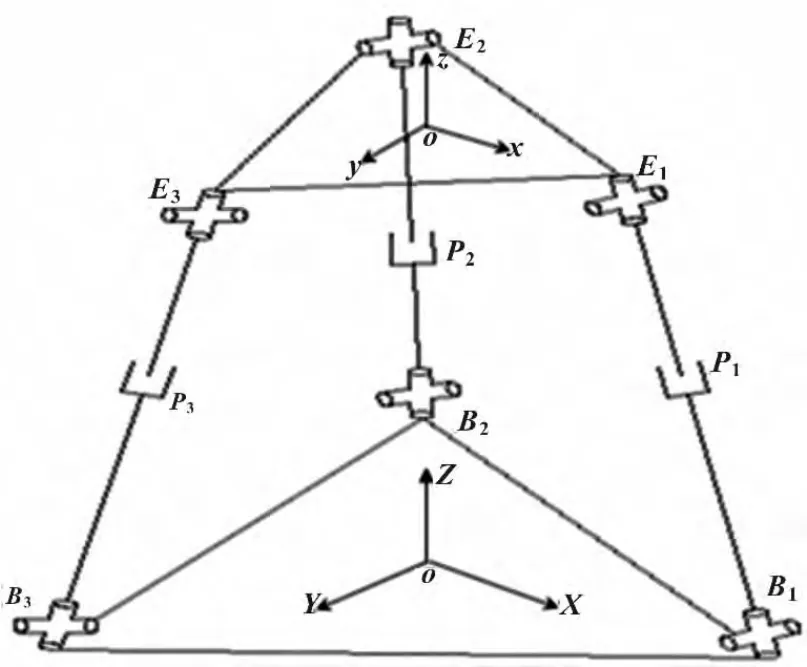
圖1 3-UPU型并聯機器人結構示意圖
1.1 螺旋理論
螺旋理論形成于19世紀。1900年R.S.BALL完成經典著作《旋量理論》。20世紀前半葉,幾乎無人問津旋量理論。1948年,F.M.DIMENTBERG在分析空間機構時,才再次應用了這個理論。此后,旋量理論才逐漸為機構學所重視,得以迅速地發展[8]。
如圖2,螺旋理論中的一個旋量可同時表示空間一組對偶矢量。
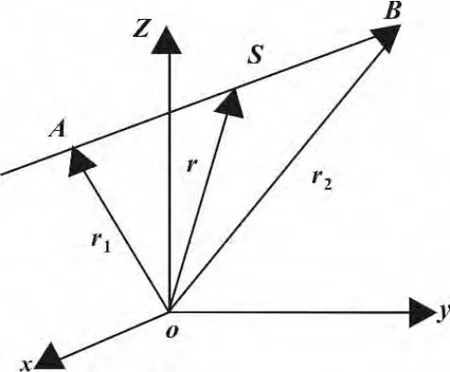
圖2 螺旋系幾何示意圖
旋量用對偶矢量表示:

式中:r×s=s0-hs為該旋量軸線位置,h為旋量節距,具有長度單位。當h=0,(s;s0)=(s;s0)為線矢量;當h=∞,(s;s0)=(0;s)為偶量。

式中:“。”表示螺旋的互易積。0節距的力螺旋描述的是力,無窮大節距的力螺旋則是力偶。逆螺旋定義的是機構的公共約束,借助Mathematic可求得逆螺旋。
1.2 3-UPU型并聯機器人逆螺旋
因支鏈均為UPU,任取一條支鏈進行分析,如圖3。以虎克副B1外側軸心為X軸建直角坐標系OXYZ,支鏈與X軸的夾角為α。依據螺旋理論可得支鏈B1E1的運動螺旋為:
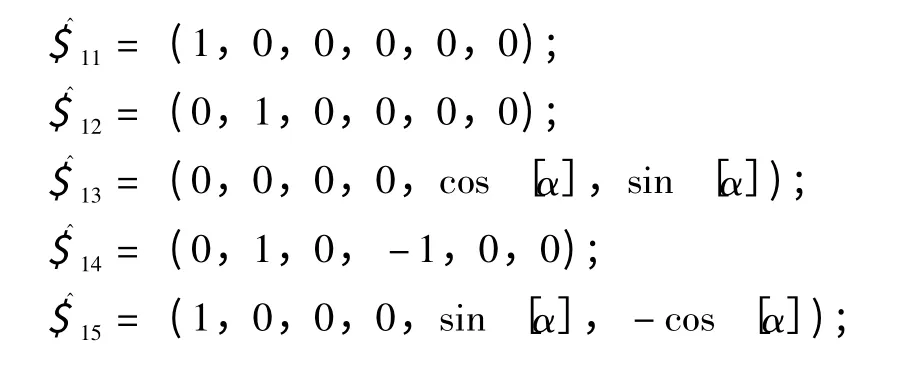
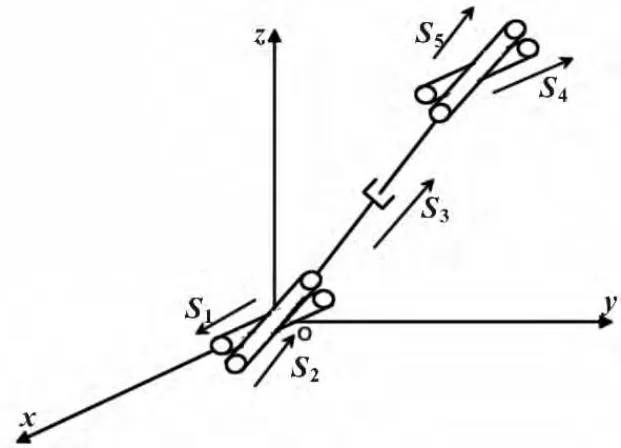
圖3 UPU支鏈運動螺旋
支鏈是由末端受5個螺旋組合而成的螺旋系,并受到一個約束。由于運動螺旋的反螺旋是結構約束,表示物體在三維空間受到的約束,支鏈末端受到的約束和支鏈螺旋系的反螺旋是等價的。利用Mathematica計算可得反螺旋為:

分析可得,支鏈受到一個約束力偶,約束支鏈沿z軸的轉動自由度。同理,另外兩條支鏈也各受一個約束力偶,并依據線矢和旋量在不同幾何空間下的最大線性無關數表[9]可確定該機構受X、Y、Z方向的力偶約束,只能三維平動。
2 3-UPU型并聯機構建模
SimMechanics是Simulink中機構系統模塊集,它可對各種運動副連接等剛體進行建模與仿真,實現對機構系統進行動態性能分析與設計目的。借助該工具進行機構分析不需要建立復雜的數學模型和程序的設計即可實現實時分析和機構運動狀態的模擬顯示,它大大地提高機構設計和研究人員的工作效率[10-11]。
基于SimMechanics的機構建模有兩種方法,分別是直接方法和間接方法。直接方法是利用SimMechanics對機構建模,建模過程雖簡單,但仿真前的各模塊參數設置易于出錯,尤其是涉及到一些剛體的慣性矩等參數設置,適用于簡單的機構。間接方法是借助于實體建模工具及其與SimMechanics的接口技術實現機構的聯合建模仿真,該方法適用于復雜模型。
本文作者利用SimMechanics&SolidWorks接口技術對3-UPU并聯機構的建模與仿真過程可闡述如下:
(1)運用SolidWorks對并聯機構實體建模,如圖4,并另存為.XML文件;
(2)Matlab中執行mech_import命令,通過Import Physical Modeling XML窗口導入.XML文件,在SimMechanics中生成機構的可視化結構模型。如圖5—7,對模型添加所需的驅動及檢測模塊,并另存為.SLX文件。接口技術的好處在于生成的模型中,各構件的參數均已自動設置;
(3)合理地設置初始參考輸入值,如齊次變換矩陣、初始位置等,如圖8所示;
(4)設置Configuration Parameters中的可視化選項并運行,可得如圖9中可視化的仿真實體。

圖4 3-UPU并聯機構實體圖
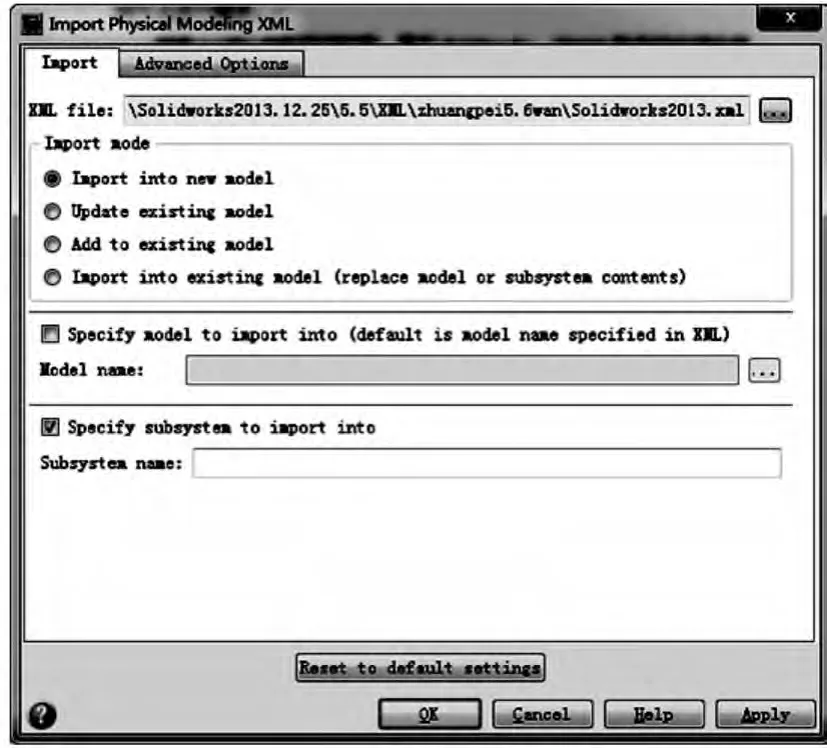
圖5 XML文件轉換器圖
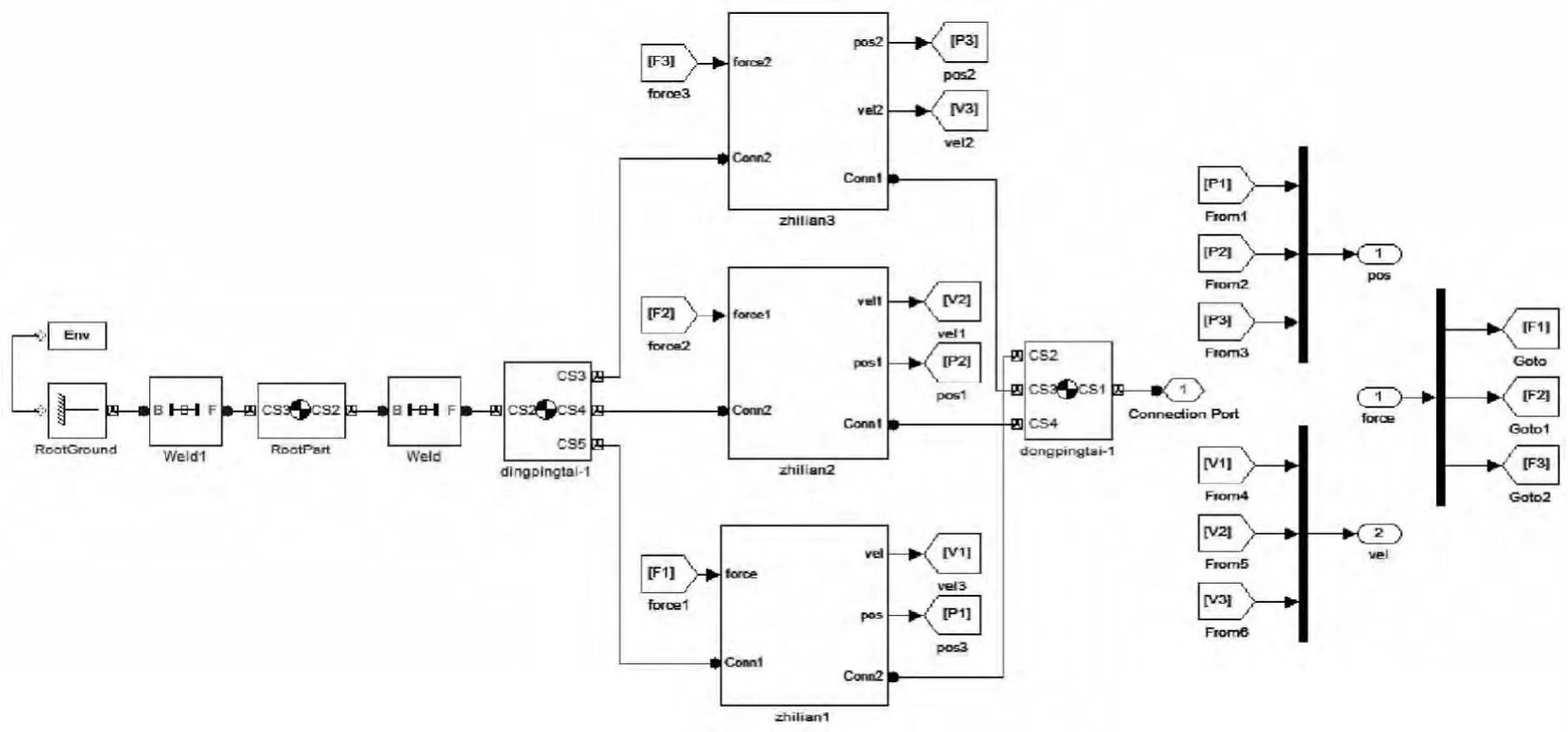
圖6 3-UPU并聯機構轉化后機構整體圖
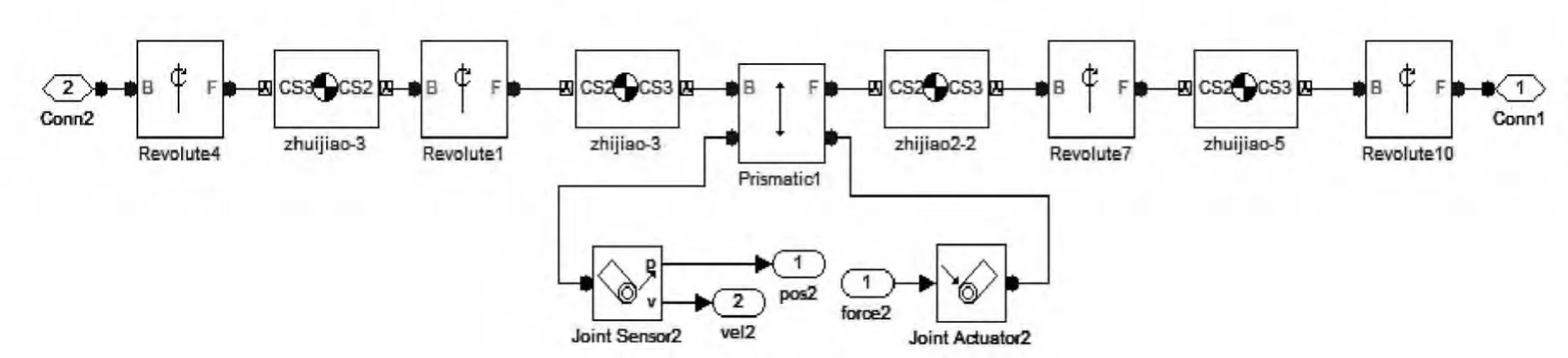
圖7 3-UPU并聯機構支鏈模型圖
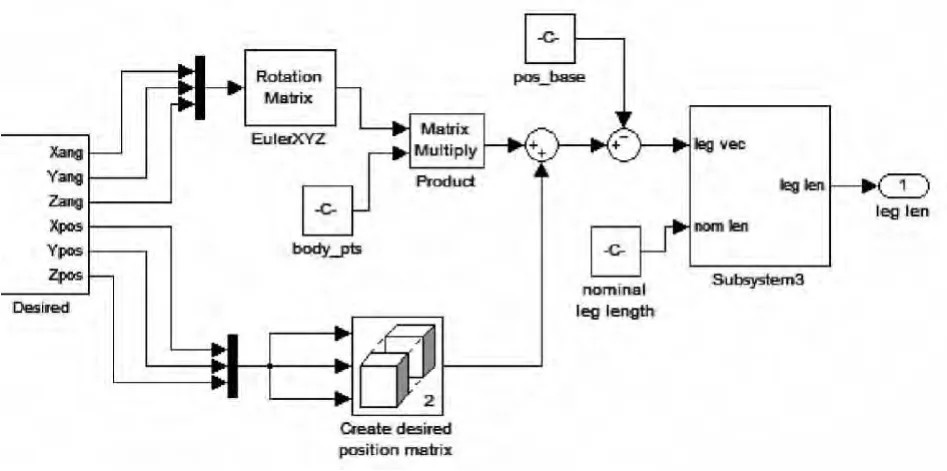
圖8 理論模型
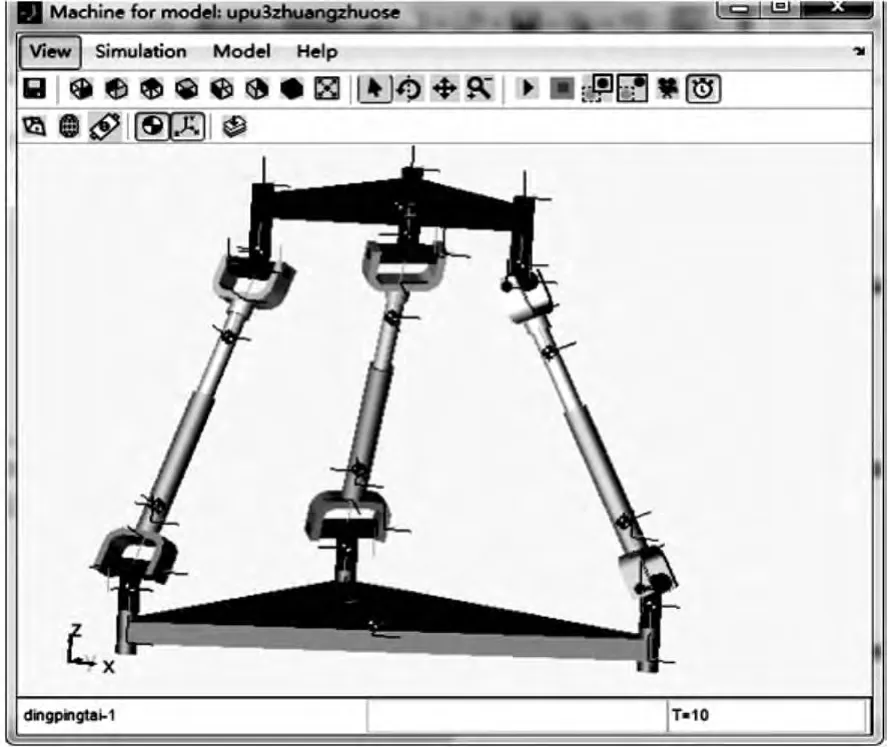
圖9 3-UPU并聯機構轉換后的可視化結構圖
3 控制系統設計
3.1 傳統PID控制
傳統PID控制具有結構簡單、穩定性好、可靠性高等優點,如圖10所示。
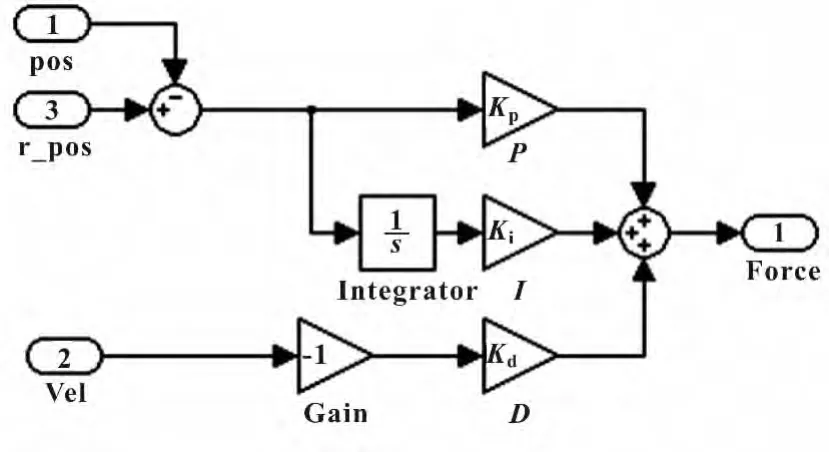
圖10 傳統PID控制圖
PID控制原理,是在理想狀態下由計算公式所得到的期望值與實際輸出值的差構成控制偏差,作為控制器的輸入量,再對其輸入量進行比例運算、積分運算、微分運算,經過線性組合合并成控制量輸出,再由控制量對被控對象進行控制。根據傳統PID控制原理,對3-UPU并聯機構仿真的傳統PID控制系統可設計成如圖7所示,參數Kp、KI、KD可由試驗緊湊法整定。
3.2 模糊PID控制
由于PID控制中,參數調整的不確定性,大大增加了控制過程中的工作量,同時使其控制作用很難達到最佳效果。模糊PID控制原理(如圖11)就是應用模糊理論,通過分析PID控制參數的作用效果,構造隸屬度函數,建立模糊規則,運用模糊推理,使PID參數能夠實現實時最佳參數調整。
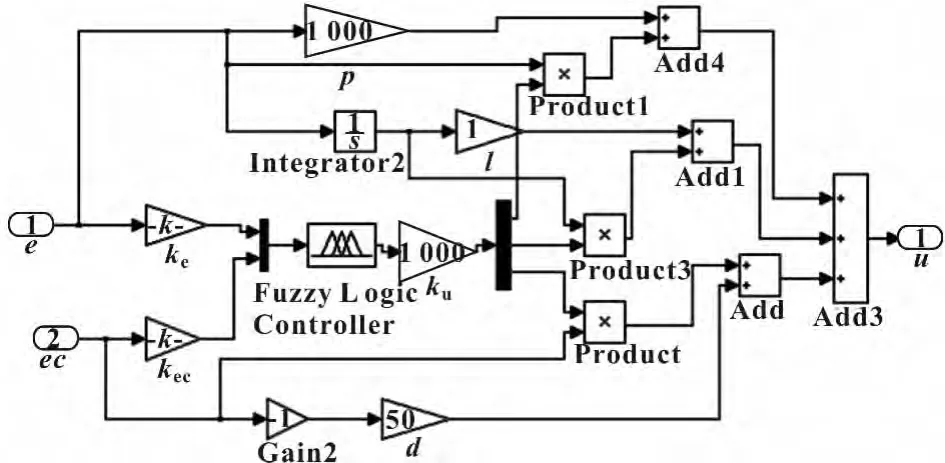
圖11 模糊PID控制系統
模糊推理是依據輸入輸出量的模糊語言變量及其隸屬函數,通過由模糊規則確定的對應關系進行運算,以確定任意值的輸入量對應的輸出量的值,并以此得到詳細的控制查詢表。模糊推理方法有很多種,包括Mamdani極大極小運算法、乘積模糊推理法和由日本學者Tsukamoto提出的適合單調隸屬函數的模糊推理方法等。其中,Mamdani極大極小運算法應用廣泛,能滿足運算的復雜程度和得到信息的豐富程度的綜合要求。
3.2.1 變量和模糊規則的確定
由于模糊PID控制器主要是針對PID的3個參考調整,使其能夠實現參數自調整的效果。同時,對于該控制器的輸入,選取控制器的偏差E和偏差變化EC作為輸入量,kp、ki、kd為輸出量。基本原理是把if-then規則定義為乘積空間中的二元模糊關系。對模糊控制的模糊子集可表示如下:

用模糊語言變量表示為(NB,NM,NS,ZO,PS,PM,PB)。
結合傳統PID參數的整定,根據相關領域的專家對PID控制試驗數據分析,可得對輸入輸出變量模糊區域的模糊規則表。表1中共49條模糊規則,由第一條語句所確定的控制規則為u1,同理可得控制量的模糊集合u為:

模糊集合的論域U可采用最大隸屬度原則進行模糊模式的識別歸類,該方法應用于個體的識別,設Ai∈F(U)(i=1,2,…,n),對u0∈U,若存在i0,使Ai0(u0)=max{ A1(u0),A2(u0),…,An(u0)},則認為u0相對地隸屬于Ai。
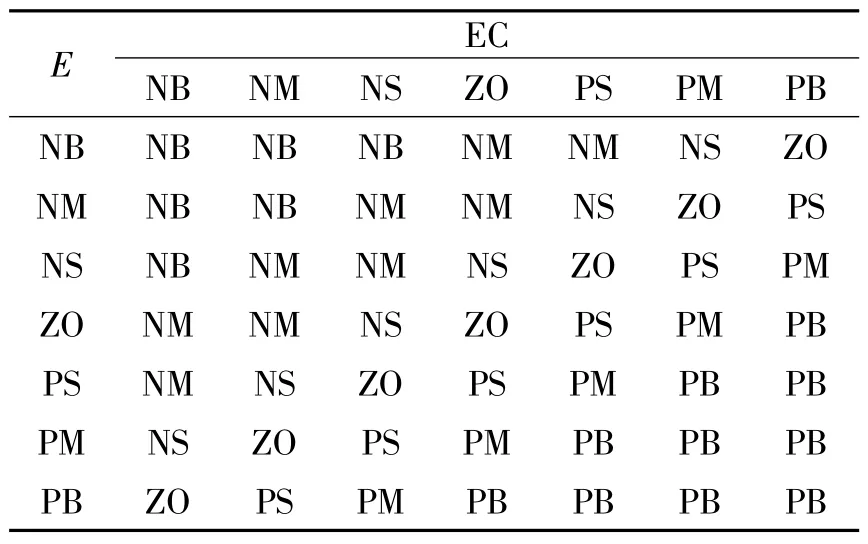
表1 模糊規則表
文中采用工業控制中廣泛使用去模糊法—加權平均法,可得關于模糊規則的模糊相似矩陣R=(rij)n×m給出,具體值為rulelist=[1 1 7 1 5 1 1;1 2 7 1 3 1 1;1 3 6 2 1 1 1;1 4 6 2 1 1 1;1 5 5 3 1 1 1;1 6 4 4 2 1 1;1 7 4 4 5 1 1;2 1 7 1 5 1 1;2 2 7 1 3 1 1;2 3 6 2 1 1 1;2 4 5 3 2 1 1;2 5 5 3 2 1 1;2 6 4 4 3 1 1;2 7 3 4 4 1 1;3 1 6 1 4 1 1;3 2 6 2 3 1 1;3 3 6 3 2 1 1;3 4 5 3 2 1 1;3 5 4 4 3 1 1;3 6 3 5 3 1 1;3 7 3 5 4 1 1;4 1 6 2 4 1 1;4 2 6 2 3 1 1;4 3 5 3 3 1 1;4 4 4 4 3 1 1;4 5 3 5 3 1 1;4 6 2 6 3 1 1;4 7 2 6 4 1 1;5 1 5 2 4 1 1;5 2 5 3 4 1 1;5 3 4 4 4 1 1;5 4 3 5 4 1 1;5 5 3 5 4 1 1;5 6 2 6 4 1 1;5 7 2 7 4 1 1;6 1 5 4 7 1 1;6 2 4 4 5 1 1;6 3 3 5 5 1 1;6 4 2 5 5 1 1;6 5 2 6 5 1 1;6 6 2 7 5 1 1;6 7 1 7 7 1 1;7 1 4 4 7 1 1;7 2 4 4 6 1 1;7 3 2 5 6 1 1;7 4 2 6 6 1 1;7 5 2 6 5 1 1;7 6 1 75 1 1;7 7 1 7 7 1 1];
對程序執行命令showrule(‘a’)、ruleview(‘a’)和surfview(‘a’)便可得相應的模糊邏輯工具箱的GUI圖如圖12—14所示。

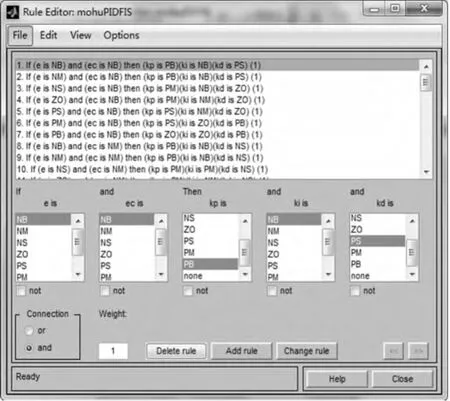
圖12 模糊規則編輯器圖
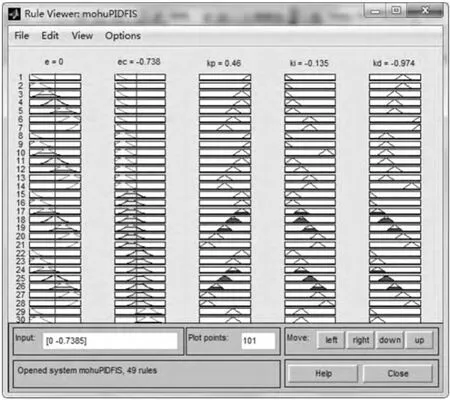
圖13 模糊規則觀察器圖
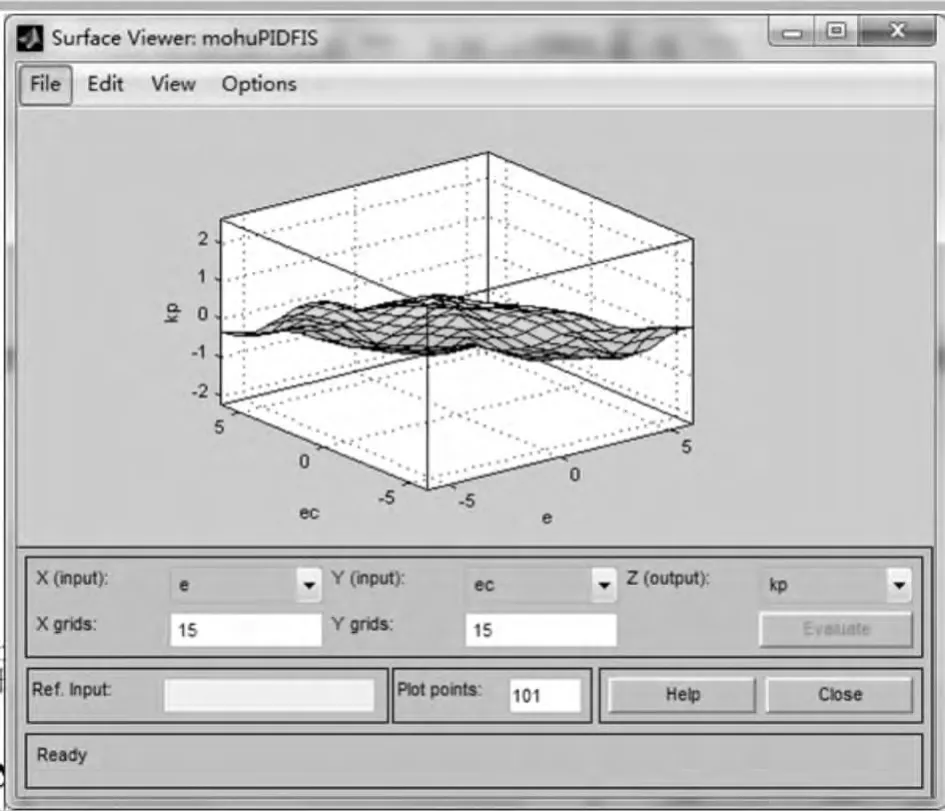
圖14 輸出曲面觀察器圖
3.2.2模糊控制器設計
模糊控制器是直接實現模糊推理算法的專用工具。可用軟件和硬件兩種方式完成模糊控制器的功能。當計算量比較小時,可用軟件實現,但對于一些計算量大、實時要求高的控制系統,需要用硬件設備直接實現模糊推理,以達到計算迅速、使用簡便的目的[12]。模糊控制器的設計步驟包括模糊化、構建模糊推理規則、確定權與規則信度和反模糊化,如圖10中的Fuzzy Logic Controller,設計程序見3.2.1節。
4 仿真
根據文中所建立的3-UPU型并聯機構及控制系統模型,采用Matlab語言對傳統PID控制和模糊PID控制進行程序設計并進行控制性能比較,如圖15。PID參數調整值為kp=1.3、ki=4.3、kd=0.57,輸入三平動信號為15sin( 5πt)的正弦信號。3-UPU型并聯機器人動平臺位置跟蹤圖與輸入信號相近,如圖16。
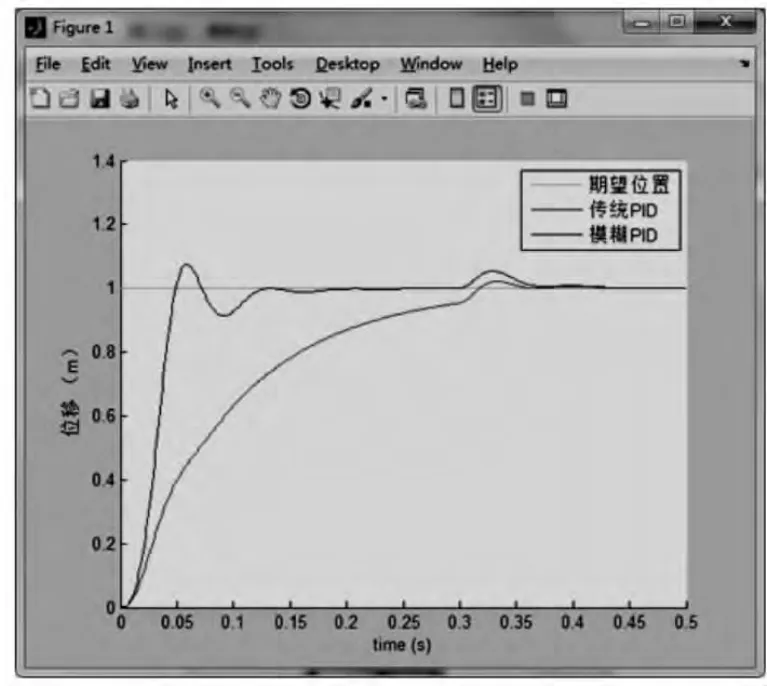
圖15 傳統PID與模糊PID控制響應對比圖
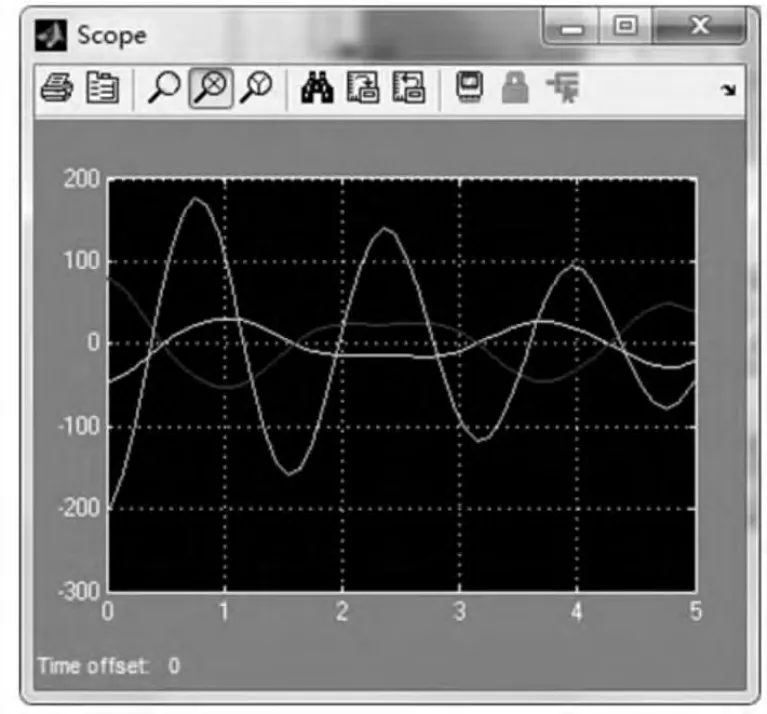
圖16 3-UPU型并聯機器人模糊PID控制動平臺位置跟蹤
5 結束語
文中對提出的3-UPU并聯機構運動特性仿真和控制系統進行了分析。首先,利用模型轉換接口技術建模仿真;其次,對傳統和模糊PID控制方法建立模型及系統性能分析。結果對比可得:由于并聯機構具有明顯的非線性,傳統PID控制很難實現預期的控制目標。模糊PID控制較傳統PID控制具有控制精度高、響應更快、性能明顯改善等優點。文中還通過XML文件中附帶的STL文件提供了每個剛體的可視化實體動畫模型。同時,3-UPU并聯機構仿真結果也驗證了1.2節所得的3個轉動均被約束力偶約束,僅實現純平動。該方法提高了復雜且不易在SimMechanics中直接建模的模型的建模效率和準確率。
[1]BAJPAI A,ROTH B.Workspace and Mobility of a Closeloop Manipulator.[J].The International Journal of Robotics Research,1986,5(2):131-142.
[2]GOSSELIN CM,ANGELESJ.The Optimum Kinematic Design of a Spherical Three-degree-of-freedom Parallel Manipulator[J].Mech.Transm.Autom.Des.1989,111(2):202-207.
[3]HUNT K H.Structural Kinematics of In-parallel-actuated Robot Arms[J].ASME Journal of Mechanisms,Transmission and Automation in Design,1983,105(4):705-712.
[4]黃真,孔令富,方躍法.并聯機器人機構學理論及控制[M].北京:機械工業出版社,1997.
[5]LI Jianfeng,WANGJinsong.Inverse Kinematic and Dynamic Analysis of a 3-OF Parallel Mechanism[J].Chinese Journal of Mechanical Engineering,2003,16(1):54-58.
[6]朱大昌,李培,顧起華,等.全柔順并聯機構理論[M].北京:冶金工業出版社,2013.09.
[7]朱大昌.基于并聯支撐機構的車載雷達天線自動調平系統研究[D].北京:北京交通大學,2008.
[8]黃真,趙永生,趙鐵石.高等空間機構學[M].北京:高等教育出版社,2006.
[9]黃真,孔令富,方躍法.并聯機器人機構學理論及控制[M].北京:機械工業出版社,1997.
[10]楊樹川,邵金龍,楊術明等.基于SolidWorks&SimMechanics的機構運動分析與仿真[J].河北工業科技,2011(4):221-225.
[11]張立勛.機電系統建模與仿真[M].哈爾濱:哈爾濱工業大學出版社,2009.
[12]石辛民,郝整清.模糊控制及其MATLAB仿真[M].北京:清華大學出版社;2008.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02
山東工業技術(2016年15期)2016-12-01 05:31:22
