基于磁致伸縮原理的汽車油量儀的設計
2015-04-28 03:34:45付永慶楊佳彬
應用科技 2015年4期
付永慶,楊佳彬
哈爾濱工程大學信息與通信工程學院,黑龍江哈爾濱150001
基于磁致伸縮原理的汽車油量儀的設計
付永慶,楊佳彬
哈爾濱工程大學信息與通信工程學院,黑龍江哈爾濱150001
為提高汽車油量測量精度,設計了一種基于磁致伸縮原理的新型數字化汽車油量儀。具體介紹了脈沖功率放大、回波信號放大與整形、高精度時間測量以及CAN輸出接口等電路模塊。討論了環境溫度測量誤差和液位測量波動誤差的分析與校正,從而大大提高了油量儀的測量精度及環境適應能力。通過實驗數據表明,該設計滿足高精度汽車油量測量的要求,為油量儀的產品化生產奠定了基礎。
磁致伸縮;液位測量;傳感器;時間測量;溫度補償
網絡出版地址: http://www.cnki.net/kcms/detail/23.1191.U.20150730.0847.001.html
目前油量測量的方法有很多,比如超聲波式、雷達式、電容式、光電式、液壓式、熱學式,但大部分汽車油量測量依然使用比較傳統的浮子式電位計測量法,這種測量手段存在精度低、故障率高等弊端[1]。為了解決這一難題,本文提出一種基于磁致伸縮原理的汽車油量測量系統,它利用材料的磁致伸縮效應對油箱油位進行非接觸式測量,具有測量精度高、抗干擾能力強、故障率低、安裝簡便等優點。特別適合高精度汽車油量儀的應用場合。
1 磁致伸縮液位傳感器的測量原理及結構
1.1磁致伸縮原理
磁致伸縮液位傳感器的測量機理源于材料的磁致伸縮特性。鐵磁材料在外磁場作用下,材料內部方向任意的磁疇將發生旋轉,旋轉至與外磁場方向一致,使其長度或體積發生微小變化,這一現象稱為磁致伸縮效應[2]。當然也存在磁致伸縮逆效應,即當材料受到壓力或拉力作用時,材料內部的磁化狀態也隨之改變。但磁致伸縮效應及其逆效應有多種表現形式,磁致伸縮液位傳感器主要應用其中的維德曼效應及其逆效應取得傳感器信號。維德曼效應是指當磁致伸縮材料同時受到軸向磁場和縱向磁場磁化時發生扭轉從而產生扭轉波的現象,這是測量信號的激發基礎;維德曼逆效應,也稱維拉里效應,是指磁致伸縮材料由于扭轉導致周圍磁場變化的現象,這是信號接收的基礎[3]。磁致伸縮原理并不復雜,但由于磁致伸縮量特別微小,一般的鐵鎳合金只有30×10-6,即使應用新型超稀土材料,磁致伸縮量也不過1 000×10-6,所以對硬件接收電路具有很高的要求。
1.2油量傳感器測量原理及結構
磁致伸縮液位傳感器是綜合應用磁致伸縮效應、浮力原理、電磁感應理論和電子技術等綜合技術的高技術產品[4]。它主要由波導管、非接觸磁環、應變脈沖拾取器和電子電路所組成,其結構如圖1所示。
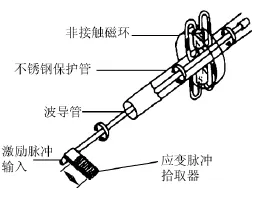
圖1 磁致伸縮液位傳感器結構
工作時,由電子電路向磁致伸縮波導絲發送一起始脈沖,與此同時將在波導絲周圍產生與波導絲垂直的環形磁場,二者沿著波導絲以光速向尾端傳播。不銹鋼外管上套有內置永久磁鐵的浮子隨液面上下浮動,同時產生一軸向磁場。當兩磁場相交時,產生一螺旋磁場,根據維德曼原理,螺旋磁場在此處激發一扭轉波,扭轉波以超聲波速沿著波導絲向兩端傳播。當扭轉波傳播到波導絲尾部時被阻尼元件吸收,當扭轉波傳播回頂部時,被磁致伸縮換能器接收,轉換為傳感器的終止脈沖。由于波導絲的材質是一定的,所以扭轉波的傳播速度也是一定的[5]。因此通過測量起始脈沖與終止脈沖的時間差t,再乘以扭轉波速v就可得到被測液面的高度d,即

根據磁致伸縮原理,可將傳統的浮子接觸式液位測量轉變為非接觸式液位測量。而現在影響測量精度的主要因素是扭轉波的傳播速度和計時精度。
2 傳感器電路設計
磁致伸縮液位傳感器電路原理如圖2所示,微控制器通過端口產生起始脈沖,經功率放大電路驅動波導絲,換能器用于接收到磁致伸縮效應產生的微弱回波信號,信號強度一般在2 mV左右,因此需通過放大和整形電路處理才能形成終止脈沖。高精度計時電路用于計算起始脈沖與終止脈沖之間的時間差,微處理器負責按式(1)接觸液位的高度[6]。由于測量過程是連續的,所以磁浮子的位置信息能被實時地檢測出來,并且輸出端數據能以各種便利的接口形式給出,例如以CAN數據的形式輸出[7]。
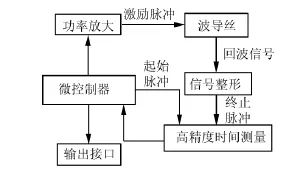
圖2 磁致伸縮液位傳感器結構
2.1脈沖功率放大電路
根據磁致伸縮效應,對施加于波導絲的激勵脈沖有嚴格的要求。首先為了保證磁致伸縮效應顯著,就必須要有足夠強的環形磁場,因此激勵脈沖電流一定要大,因為波導絲的低阻特性,應對起始脈沖進行功率放大;其次為了獲得較好的回波信號,脈沖寬度亦不能太大,應保證在微秒級,同時脈沖要有較好的矩形系數,即上升時間和下降時間要盡量短;最后還要根據傳感器的量程以及扭轉波速對脈沖設置合適的周期,以保證其扭轉波在波導絲中有最長的傳播時間,但周期也不宜過長,否則會影響傳感器的刷新時間。
本設計利用微處理器一根端口線產生一周期為10 ms、脈寬為5 μs的起始脈沖,其上升和下降時間均為100 ns左右。由于微控制器的驅動能力有限,必須對其進行功率放大。考慮到激勵脈沖的電流要求,本文采用IRF840場效應管對起始脈沖進行功率放大,IRF840最大耐壓值為500 V最大電流值為8 A。通過功率放大得到一幅值為7.5 V,電壓脈沖信號,將其加載到長為500 mm的波導絲(阻值約為2.8 Ω左右)的發射端。波導絲中傳播的激勵脈沖電流強度超過2.5 A,完全滿足上述激勵脈沖要求。
2.2信號整形電路
信號檢測裝置模型如圖1中應變脈沖拾取器,磁致伸縮應變片與波導絲材質相同,二者剛性連接,并在應變片上纏繞線圈,根據維拉利效應與法拉第電磁感應原理來檢測回波信號。由于感應波信號大約只有2 mV,并且還含有雜波干擾,所以必須進行濾波,放大處理,考慮到感應波的特點,本文采用AD620儀表放大器對其進行放大,AD620不但擁有較高共模抑制比及增益帶寬積而且放大倍數大,完全有能力將信號放大到2 V左右甚至更高[8]
圖3是起始脈沖與經放大處理后的回波信號的對比圖,前一脈沖為感應到的激勵脈沖,中間為有用的回波。由圖可以看出,經放大處理后的波形幅值已經達到2 V左右,切回波信號干擾噪聲較少,完全滿足后繼電路處理要求。
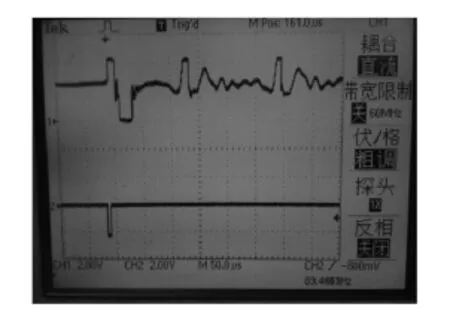
圖3 經放大得到的回波信號
回波信號送入時間測量電路前,還需要對其進行電平比較,得到終止脈沖后才能送入后繼的高精度時間測量電路。
2.3高精度時間測量
由于磁致伸縮油箱液位傳感器是通過檢測起始脈沖與終止脈沖之間的時間差來確定液位高度的,所以高精度時間測量是傳感器測量精度的基礎。由于微處理器的工作頻率只有12 MHz,無法滿足高精度時間測量的要求,所以本設計采用高精度計時芯片TDC-PG2對時間進行高精度測量。TDC-GP2是ACAM公司高精度時間測量芯片。其時間分辨率可以達到50 ps,遠遠超過了目前磁致伸縮液位傳感器對時間測量精度的要求。TDC-GP2可以進行三次采樣,平均電流消耗為15μA,測量范圍為500 ns~4 ms,完全滿足設計要求。TDC提供了精準的脈沖使能窗口,并具有高速脈沖發生器、溫度測量和時鐘控制功能[9]。
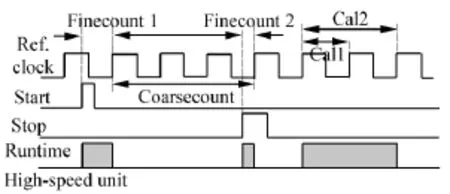
圖4 TDC-GP1時間測量原理
數字TDC是以信號通過內部門電路的傳播延遲來進行高精度時間間隔測量的。TDC的高速單元并不測量整個時間間隔,僅僅測量從START或STOP信號到相鄰的基準時鐘上升沿之間的間隔時間。在兩次精密測量之間,TDC記下基準時鐘的周期數。
由圖4可以清晰得出時間測量公式為

式中: CC為基準時鐘在相應區間內測量而得到的時間,Fc1和Fc2為TDC在相應區間內測得的通過門電路的個數,并記錄在內部寄存器中。在測量過程中必須對TDC內部進行校準,即記錄在一個和兩個基準時鐘周期內通過的門電路的個數用Cal1和Cal2表示。Tref為基準時鐘周期,測量結果存儲在內部的32位寄存器中[10]。
2.4輸出接口電路
為便于車載系統應用,本設計提供了CAN總線接口用于對外輸出油箱液位信息。設計中采用MCP2515作為CAN總線控制器,TJA1050作為CAN總線收發器,允許通過程序設置CAN總線波特率,支持以傳統模式或高速模式向外發送油箱液位測量數據,具有較強環境適應性,完全滿足與車載駕控儀表接口的應用要求。
3 軟件設置
3.1信號處理部分軟件設置
TDC與MCP2515都是通過SPI硬件與微處理器進行通信的,并且二者供電電源皆可以選擇3.3 V低電源供電,TDC-GP2程序流程如圖5所示。
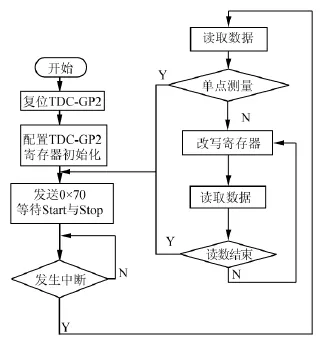
圖5 TDC-GP2程序流程
圖5中,系統上電,硬件復位。首先對芯片軟件復位,接下來對GP2進行配置寄存器設置以及初始化,確定選擇的測量范圍,Hit次數,發送0X70等待起始與終止信號,當滿足中斷條件時,GP2產生中斷信號,微處理器通過檢測該信號來判讀是否存在溢出中斷并進行數據讀取,并判斷是否為單點測量,如果是多點測量必須要重新向配置寄存器寫入數據來讀取其他測量值。
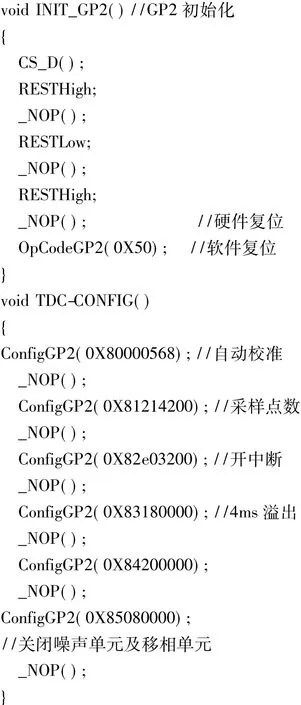
需要說明的是GP2的SPI工作在Model1模式,且需每次讀寫序列之間要保持SSN至少50 ns高電平。每次對TDC-GP2初始化之前都要對其進行復位,首先對其進行硬件復位再進行軟件復位,硬件復位時間必須大于50 ns。然后根據測量模式及具體要求對內部寄存器Reg0~Reg5進行配置,此時要注意關閉移相單元與噪聲單元,否則將導致測量失敗。不能對寄存器進行連續讀寫操作,每一個寄存器必須單獨尋址。為此給出部分關鍵程序代碼如下:
3.2數字濾波算法
由于環境干擾對TDC-GP2和其他電子部件的影響以及汽車行駛過程中油面晃動對測量讀數的影響,會造成液位測量讀數波動,故本設計采用數字濾波法來提高液位傳感器的穩定性。經過與其他數字濾波法進行比較發現,本文采用的改進的平均濾波法,具有穩定性高,反應速度快等優點,完全適用于汽車油位測量。
數字濾波算法流程如圖6所示。
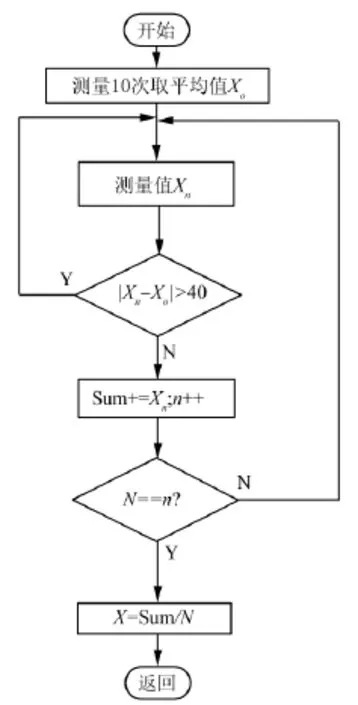
圖6 數字濾波程序流程
根據大量實驗結果表明,環境干擾產生的錯誤時間的發生概率小于10%,而且錯誤多為檢測到了錯誤的感應脈沖,這樣造成的測量錯誤最多為140 μs,所以每次開始都先取10次的測量結果的平均值為一門限,如果這10次測量中沒有錯誤則得到的為正確結果,如果里面出現了2次錯誤結果,經過平均以后結果也只比準確結果大28 μs左右。接下來的測量結果一次與此門限進行對比,如果二者差的絕對值大于40 μs則認為由于干擾產生了錯誤;如果小于40 μs則認為檢測到了正確的結果。最后完成所有測量并對其做平均算法得到最終結果。這種算法不但可以有效抑制由于干擾引起的錯誤,而且對汽車行駛時油面晃動也可以起到積極作用,大大消弱了輸出讀數的波動。
4 溫度對測量精度的影響及補償方法
由于燃油密度會隨著環境溫度變化而改變,而浮子在燃油中浸沒高度又會隨著密度的變化而變化,這就必定給測量結果帶來一定影響,必須加以修正[11]。
設浮子浸入燃油的高度為h,浮子浸入燃油高度變化為Δh,燃油密度為ρ,燃油密度變化為Δρ,利用阿基米德原理得知:

式中:負號表示浮子進入燃油的高度隨密度增加而減小。
通常采用溫度補償算法來修正此誤差,定義環境溫度為20℃時的燃油密度為標準密度,用d20表示,溫度為t時密度用dt表示。二者關系如下

式中α為修正系數。在無法直接測量燃油密度的情況下,通過測量燃油溫度來估算出燃油密度,用程序按照式(2)求出浮子在燃油中進入的高度,從而實現溫度補償。此外,盡量減小浮子重量也可以減小溫度對測量精度的影響[12]。
5 結束語
本設計將磁致伸縮技術應用到汽車油量測量中,提供了相應的軟硬件設計方法,通過實驗數據比對知,其油位測量精度可達到微米級,且本設計成本低廉。因其具有高精度測量和低故障率的特性,將其用于汽車油位測量領域具有絕對技術優勢及廣闊的市場應用前景。
[1]昌學年,姚毅,閆玲.位移傳感器的發展及研究[J].計量與測試技術,2009,36(9) : 42-44.
[2]趙芳,姜波,余向明,等.磁致伸縮效應在高精度液位測量中的應用研究[J].儀表技術與傳感器,2003(8) : 44-45.
[3]王崢,常曉明,腩若弘之.長線磁致伸縮位移傳感器激勵波的研究[J].太原理工學報,2010,41(3) : 241-244.
[4]王衛兵,陳國兵.基于磁致伸縮傳感器的液位連續控制系統設計[J].計算機測量與控制,2011,19(4) : 836-841.
[5]楊永枝.基于磁致伸縮效應的位移傳感器設計[C]//山西省電工技術學會2013學術年會論文集.太原,中國,2014: 104-110.
[6]馮建.磁致伸縮位移傳感器電路系統的設計[J].電子測量技術,2010,33(1) : 11-13.
[7]劉濤,裘祖榮,樊玉銘.磁致伸縮飛機油位傳感器的電路設計[J].電子測量技術,2006,29(3) : 173-174.
[8]柴婷婷.磁致伸縮位移傳感器檢測信號的實驗研究[J]測試測量技術.2008(6) : 8-11.
[9]馬小燕.基于TDC-GP2的時間間隔測量模塊研究[J].機電信息,2012(36) : 140-141.
[10]高濤,朱蘊璞,吳蕊,等.TDC-GP2在磁致伸縮傳感器中的應用[J].自動化儀表,2010,31(12) : 68-71.
[11]WANG Zheng,CHANG Xiaoming,WAKIWAKA H.Magnetic pole intensity model of magnetostrictive mosition sensor[J].Chinese Journal of Sensors and Actuators,2010,23(8) : 66-69.
[12]謝振峰,文紅義.磁致伸縮技術在內燃機車燃油液位傳感器上的應用[J].內燃機車,2009(1) : 243-245.
Design of auto oil measuring instrument based on the magnetostrictive principle
FU Yongqing,YANG Jiabin
College of Information and Communication Engineering,Harbin Engineering University,Harbin 150001,China
In order to improve the precision of auto oil measurement,a new digital automobile oil measuring instrument based on the magnetostrictive principle is designed.It includes power amplifier circuit,signal amplification and shaping circuit,high-precision time measuring circuit and CAN bus interface circuit.The measuring error caused by environmental temperature change is analyzed and corrected to improve the precision,which greatly improves the measuring accuracy and environment adaptability of the instrument.The signal waveform and measurement data of each module test show that this scheme can meet the requirements of high precision auto oil measurement,laying the foundation for the production of the oil measuring instrument.
magnetostrictive principle; liquid level measurement; sensor; time measuring; temperature compensation
TH816
A
1009-671X(2015) 04-048-05
10.3969/j.issn.1009-671X.201411013
2014-11-21.網絡出版日期: 2015-07-30.
付永慶(1956-),男,教授,博士生導師.
楊佳彬,E-mail: yang04508214@163.com.
猜你喜歡
核科學與工程(2021年4期)2022-01-12 06:30:26
今日農業(2020年19期)2020-12-14 14:16:52
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
測控技術(2018年9期)2018-11-25 07:45:00
石油化工自動化(2018年5期)2018-11-14 02:34:30
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中學物理·高中(2016年12期)2017-04-22 11:53:03
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
汽車維護與修理(2015年2期)2015-02-28 12:15:41