FPSO串靠外輸安全指揮系統(tǒng)設計與測試*
2015-04-29 05:08:48鄭曉濤朱進全
中國海上油氣 2015年6期
鄭曉濤 朱進全 余 捷
(中海油能源發(fā)展采油服務公司技術中心 天津 300451)
鄭曉濤,朱進全,余捷.FPSO串靠外輸安全指揮系統(tǒng)設計與測試[J].中國海上油氣,2015,27(6):122-126.
FPSO采用單點系泊方式作業(yè),可在20~1 000 m水深范圍內(nèi)工作,已被廣泛用于淺海、深海和邊際油氣田的開發(fā)[1-3]。目前FPSO外輸作業(yè)越來越頻繁,其安全性受風、浪、流等水文氣象及信息交流暢通等條件影響[4-6]。FPSO外輸作業(yè)是由單點、FPSO、穿梭油輪及拖輪通過串靠方式組成的系統(tǒng)進行的,當FPSO、穿梭油輪及拖輪3條船呈直線排列時為安全狀態(tài)。FPSO外輸作業(yè)時間一般較長(12~24 h),外輸作業(yè)人員在夜間操作時由于客觀原因對FPSO和穿梭油輪相對位置觀測不及時,等兩船相對距離過小或相對夾角過大時往往來不及調整兩船的位置關系;尤其當外輸作業(yè)期間遇到突發(fā)天氣情況時,提油船長需要依托風速風向、浪高浪向、流速流向、系泊纜拉力、FPSO與穿梭油輪之間相對距離和相對夾角等實時關鍵數(shù)據(jù)向拖輪發(fā)出拖曳指令,調整FPSO、穿梭油輪和拖輪的位置關系。由于提油船長缺少3條船相對位置關系的直觀數(shù)據(jù),只能依靠經(jīng)驗來指揮調整,存在發(fā)生碰撞、輸油軟管斷裂等安全隱患。
為了規(guī)避由于海上原油外輸作業(yè)所需關鍵信息缺乏導致指揮人員操作不當而造成的安全事故,同時減輕油輪外輸人員的勞動強度,急需設計一套FPSO串靠外輸作業(yè)安全指揮系統(tǒng),指揮人員可以根據(jù)該系統(tǒng)提供的數(shù)字化信息提升外輸作業(yè)的安全性。本文依托工信部項目“FPSO原油外輸系統(tǒng)集成技術研究及關鍵設備研制”,采用Visual Studio 2010程序開發(fā)平臺、Moses軟件、傳感器和GPS定位等技術,設計出一套便于操作的FPSO串靠外輸安全指揮系統(tǒng)軟硬件系統(tǒng)。該系統(tǒng)通過各種設備采集外輸關鍵參數(shù),通過設在FPSO上的中心站對采集數(shù)據(jù)進行處理,基于實測數(shù)據(jù)和作業(yè)船資料進行統(tǒng)計學分析得出船體運動狀態(tài)預報,并以無線通信的方式發(fā)送數(shù)據(jù)至手持終端。
1 系統(tǒng)設計
1.1 硬件設計
FPSO串靠外輸安全指揮系統(tǒng)硬件由單點GPS基準站、FPSO中心站、一體測量站、外輸參數(shù)采集設備、手持終端等組成(圖1)。其中,風速儀、浪流儀AWAC和GPS基準站安裝在FPSO單點上;系泊纜拉力傳感器安裝在FPSO纜繩上,配載儀、AIS系統(tǒng)、中心站安裝在FPSO船體上,通過電纜先將數(shù)據(jù)接入多信息號數(shù)據(jù)集成轉化模塊,然后將數(shù)據(jù)信號以網(wǎng)線RJ-45接口的形式接入服務器,服務器通過網(wǎng)線與數(shù)傳電臺進行連接;穿梭油輪上安裝一體測量站,由外輸指揮人員登船時攜帶安裝。
FPSO串靠外輸安全指揮系統(tǒng)工作時,GPS基準站向所有一體測量站和中心站發(fā)送實時動態(tài)測量差分信息,由一體測量站和中心站完成厘米級定位及船體姿態(tài)測量;FPSO上的服務器將監(jiān)測傳感器采集的數(shù)據(jù)信號經(jīng)過數(shù)據(jù)采集器處理后實時顯示在屏幕上,同時通過FPSO上的數(shù)傳電臺與穿梭油輪上的數(shù)傳電臺進行數(shù)據(jù)傳輸交換,再經(jīng)WIFI AP轉換,實現(xiàn)服務器終端與手持終端機的數(shù)據(jù)同步。
在外輸作業(yè)時,一體測量站臨時安裝在穿梭油輪和拖輪上,用于測量船體的位置、姿態(tài)等信息。為了明確各模塊的空間位置關系,對一體測量站進行了三維結構設計。FPSO串靠外輸安全指揮系統(tǒng)一體測量站結構如圖2所示,可以看出,主、從GPS天線由伸縮臂與主機固聯(lián),設備不工作時可卸下GPS天線并將GPS天線伸縮臂收回;電臺天線采用伸縮式一體天線,不使用時可以一并收回;主機內(nèi)部高度集成鋰電池、AC/DC電源模塊、姿態(tài)測量模塊、雙天線GPS模塊、中心控制模塊和數(shù)傳電臺模塊。由此可見,一體測量站結構設計實現(xiàn)了模塊化,具有質量配比合理、兼有“防錯插”功能、電磁屏蔽性能較好、連接器插接和設備維護方便等特點。
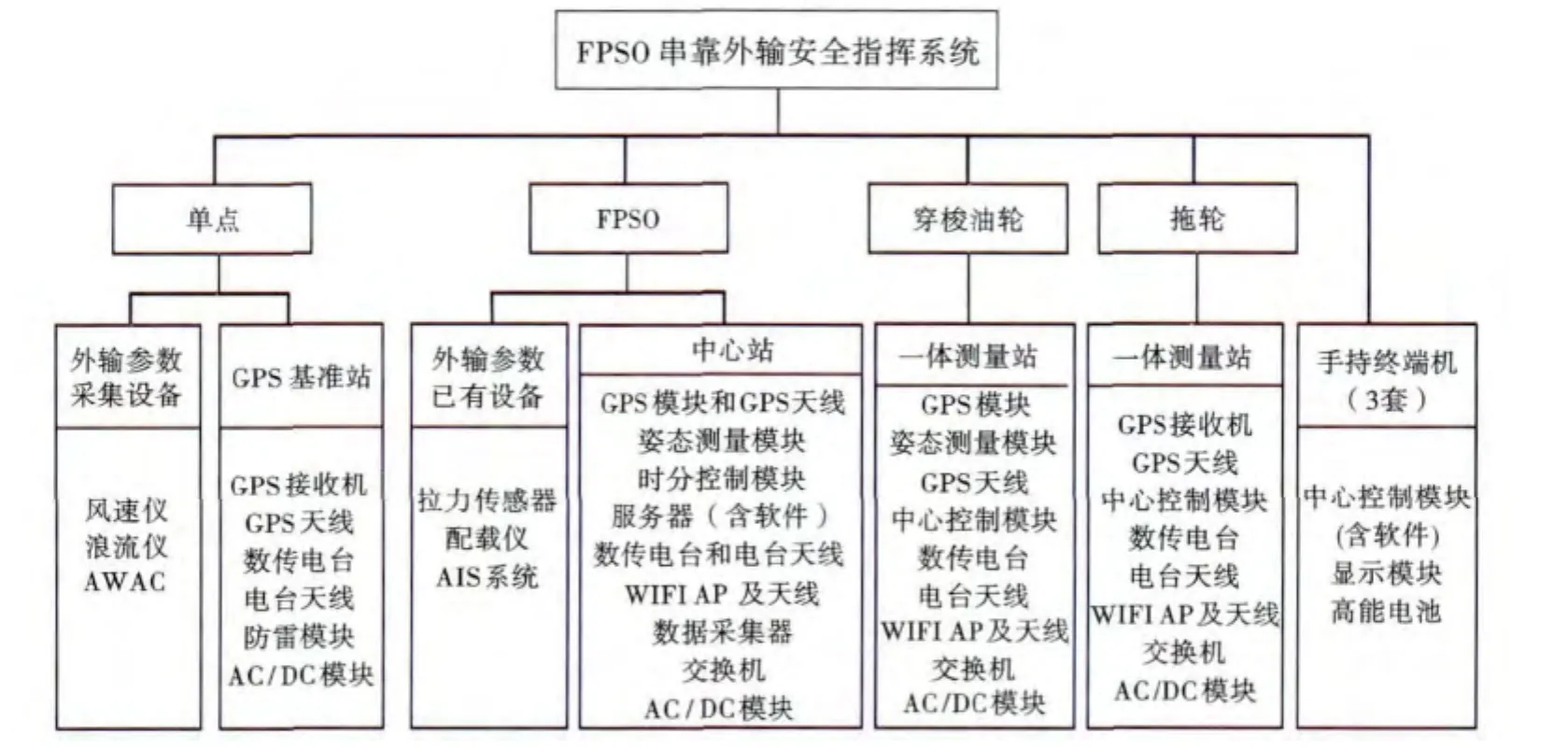
圖1 FPSO串靠外輸安全指揮系統(tǒng)結構圖Fig.1 Structure diagram of safety command system for FPSO tandem offloading operation
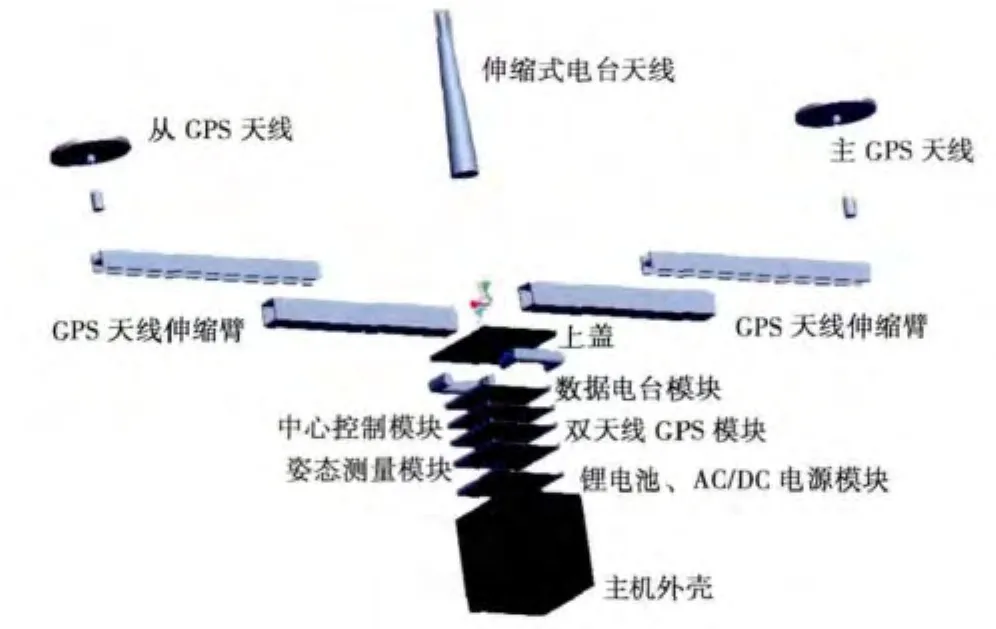
圖2 FPSO串靠外輸安全指揮系統(tǒng)一體測量站結構圖Fig.2 Structure diagram of integrated measuring station for FPSO tamdem offloading openation
1.2 軟件設計
1.2.1 系統(tǒng)邏輯結構設計
FPSO串靠外輸安全指揮系統(tǒng)按邏輯結構分為數(shù)據(jù)輸入、存儲與處理、顯示輸出等3個流程,如圖3所示。由圖3可知,F(xiàn)PSO串靠外輸安全指揮系統(tǒng)有船型數(shù)據(jù)庫、監(jiān)測數(shù)據(jù)庫、空間數(shù)據(jù)庫、預測數(shù)據(jù)庫、預警數(shù)據(jù)庫等五大數(shù)據(jù)庫,其中由船名、總長、型寬、型深、吃水等船型資料建立船型數(shù)據(jù)庫;監(jiān)測設備(如風速風向儀、浪流儀、拉力傳感器、配載儀、AIS系統(tǒng))傳送監(jiān)測數(shù)據(jù),采取標準化數(shù)據(jù)格式構建監(jiān)測數(shù)據(jù)庫;以嵌入FPSO外輸作業(yè)區(qū)域的電子海圖為背景,以船形圖標顯示船舶方位信息并構建空間數(shù)據(jù)庫;借助Moses軟件模擬計算FPSO外輸作業(yè)參數(shù)所得結果,并經(jīng)臨界條件過濾判斷形成預測數(shù)據(jù)庫;由預先設定的各種預警信息建立預警數(shù)據(jù)庫。
預測數(shù)據(jù)庫是FPSO串靠外輸安全指揮系統(tǒng)的核心。基于現(xiàn)場監(jiān)測數(shù)據(jù)進行風、浪、流共同作用下的FPSO外輸作業(yè)參數(shù)計算,不僅風、浪、流組合復雜多變,而且FPSO和穿梭油輪的船舶載度隨著輸油量變化而改變,因此計算的工作量頗大。如果該系統(tǒng)直接集成計算模塊,每一次預報均現(xiàn)場計算,且耗時大于0.5 h,那么預測和預警的功能在時效上將失去意義。為了能實時預報,模擬計算結果必須快速反饋,故基于FPSO外輸作業(yè)所在海域的水動力環(huán)境特征,模擬外輸作業(yè)期間FPSO與穿梭油輪在水流、波浪和風等共同作用下的運動姿態(tài)和方位等信息,建立模擬數(shù)據(jù)庫,這樣系統(tǒng)在每一次工作時即可迅速調入相應模擬值,為外輸作業(yè)安全提供決策參考。
1.2.2 模擬數(shù)據(jù)庫構建
模擬計算時,假定流體為均勻、不可壓縮、無黏、無旋條件下,流動的基本方程為關于速度勢的線性Laplace方程。應用線性理論后,定常空間速度勢φ(x,y,z)要滿足的控制方程[7]為 Δ2φ(x,y,z)=0。應用疊加原理,線性速度勢可分解為入射勢φI、繞射勢φD和對應于各運動模態(tài)的輻射勢φMj,即
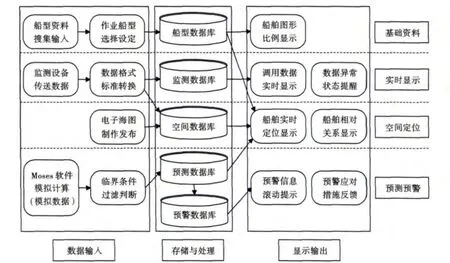
圖3 FPSO串靠外輸安全指揮系統(tǒng)邏輯結構圖Fig.3 Logic structure diagram of safety command system for FPSO tandem offloading operation


考慮到系泊系統(tǒng)、環(huán)境載荷等非線性因素的共同影響,需要采用時域方法進行求解。時域中的運動方程為,為系統(tǒng)的時延函數(shù),Bij為阻尼系數(shù)矩陣;t、τ為時間參數(shù),且0≤τ≤t;Gi為系泊纜張力;FiD為波浪載荷;FiW為風載荷;FiC為流載荷。
由FPSO、穿梭油輪以及系纜組成的多浮體系統(tǒng)在風、浪、流等環(huán)境載荷和系泊載荷的共同作用下處于平衡,在時域內(nèi)可根據(jù)平衡方程(2)對此多浮體系統(tǒng)進行求解,得到FPSO和穿梭油輪處于平衡位置的運動狀態(tài)數(shù)據(jù)。
Chen等[8]闡述了由頻域到時域轉換的多浮體運動分析方法,表明由此方法可得任意波隨時間變化的響應。結合外輸系統(tǒng)現(xiàn)狀,建立了FPSO串靠外輸安全指揮系統(tǒng)數(shù)值模擬流程,如圖4所示。由圖4可知,依據(jù)廠家提供的FPSO和穿梭油輪的型值表建立FPSO、穿梭油輪的水動力模型。將FPSO、穿梭油輪劃分成面單元,建立系泊系統(tǒng),定義系統(tǒng)的初始位置及風、浪、流等環(huán)境參數(shù),在時域中模擬多浮體運動響應及計算系泊系統(tǒng)的受力。主要分析步驟如下:
1)利用三維勢流理論計算船舶在頻域中的水動力系數(shù)(附加質量、輻射阻尼、波浪力);
2)通過卷積積分將頻域中的水動力系數(shù)轉換成時域下的水動力系數(shù);
3)根據(jù)系泊纜繩的預張力確定其初始參數(shù);
4)計算風力和流力;
5)不計入系纜子系統(tǒng),求解時域中的運動方程;
6)根據(jù)船體的運動計算系泊纜的動力參數(shù);
7)在船體運動方程計入系纜張力后,求解時域運動方程。重復第6步和第7步,直至得到系統(tǒng)的穩(wěn)態(tài)解,得出在模擬時間內(nèi)FPSO及穿梭油輪所處的位置、運動速度及加速度。
式(2)中:i,j=1,2,…,6,為船體六自由度,包括縱蕩、橫蕩、垂蕩、橫搖、縱搖和艏搖;Mij為浮體質量矩陣;Aij(∞)為浮體附加質量矩陣;X為浮體的位移向量(包括縱蕩、橫蕩、升沉、橫搖、縱搖和艏搖);Aij為質量慣性矩矩陣;Cij為浮體恢復力系數(shù)矩陣;Lij=
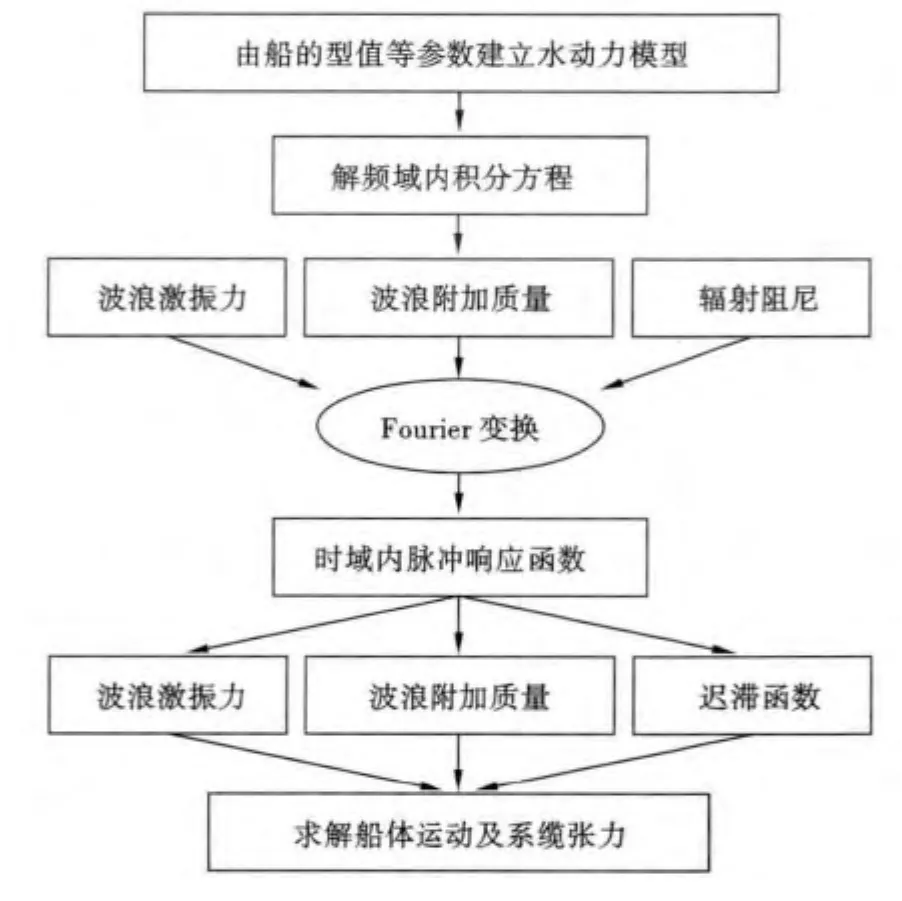
圖4 FPSO串靠外輸安全指揮系統(tǒng)數(shù)值模擬流程圖Fig.4 Numerical simulation of flow diagram of safety command system for FPSO tandem offloading operation
2 系統(tǒng)測試
FPSO串靠外輸安全指揮系統(tǒng)測試的環(huán)境條件為:風速≤8.9 m/s,流速≤1.1 m/s,浪高≤2.5 m;測試設備為:設置在單點系統(tǒng)上的GPS基準站、FPSO上的中心站、穿梭油輪和拖輪上的一體測量站。中心站和一體測量站中的3個數(shù)傳電臺之間通過電臺天線組成局域網(wǎng)實現(xiàn)FPSO、穿梭油輪和拖輪3條船舶之間的數(shù)據(jù)傳送,再通過在各船舶的工作區(qū)域架設WIFI AP及其天線實現(xiàn)服務器、3個手持終端機相互之間信息同步顯示。
FPSO串靠外輸安全指揮系統(tǒng)測試分為硬件通信測試和軟件功能測試兩部分。
1)硬件通信測試。FPSO上電臺天線與穿梭油輪上電臺天線間距約340 m,穿梭油輪上電臺天線與拖輪上電臺天線間距約200 m,數(shù)傳電臺的輸出功率均為5 W,中心站的數(shù)傳電臺天線安裝于FPSO的至高點。一體測量站分別設置于穿梭油輪和拖輪駕駛室樓頂?shù)闹粮唿c,且一體測量站的雙GPS天線與船舶航向保持平行。WIFI AP的輸出功率為1 W,在FPSO船尾的至高點、提油船長的艙室內(nèi)活動區(qū)域分別架設WIFI天線,進行WIFI覆蓋。測試結果顯示:FPSO、穿梭油輪與拖輪之間的信息無數(shù)據(jù)包丟失;室內(nèi)外的提油作業(yè)區(qū)域內(nèi)手持終端機的WIFI信號均為滿格顯示;各手持終端機之間、手持終端機與服務器之間的數(shù)據(jù)傳輸穩(wěn)定可靠。
2)軟件功能測試。由于穿梭油輪由半載變化到滿載過程中發(fā)生碰撞風險較大[6],因而選取了穿梭油輪 的 50%、60%、70%、80%、90%、100% 等 6種載荷,風速≤7 m/s,流速≤3 m/s,采用水動力學模型進行了模擬計算。1次提油作業(yè)中設穿梭油輪的載荷 分 別 為 50%、60%、70%、80%、90%、100%等在初始0時刻,先分別計算出FPSO和穿梭油輪在5、10、15 min的經(jīng)度、緯度和航向的預測值;再借助GPS模塊實測出FPSO和穿梭油輪在5、10、15 min的經(jīng)度、緯度和航向;然后對實測值與預測值的差值取絕對值,即得1次提油作業(yè)中FPSO和穿梭油輪在6種載荷下的預測誤差值。采用同樣的方法在8次提油作業(yè)中進行了計算,得到每1種載荷下的8個預測誤差值,即得6種載荷下的預測平均誤差值,如表1所示。此外,還測試了各監(jiān)測數(shù)據(jù)能否及時顯示,模擬出現(xiàn)危險狀態(tài)時系統(tǒng)能否發(fā)出預警信息。測試結果顯示:系統(tǒng)的監(jiān)測和預警數(shù)據(jù)能夠及時顯示,且運行穩(wěn)定;對于穿梭油輪6種不同載荷工況,F(xiàn)PSO和穿梭油輪的方位預測精度均基本滿足了工程需要。因此,硬件通信和軟件功能的測試結果均驗證了本文FPSO串靠外輸安全指揮系統(tǒng)的可靠性。

表1 FPSO串靠外輸時FPSO和穿梭油輪經(jīng)度、緯度、航向預測平均誤差值Table 1 Mean error of prediction of longitude,latitude and course of FPSO and shuttle tanker in FPSO tandem offloading
3 結論
根據(jù)FPSO串靠外輸安全指揮系統(tǒng)工作原理,分析了在單點、FPSO、穿梭油輪及拖輪上的硬件組成,提出了一種硬件設計技術方案,并對一體測量站進行了一體化模塊設計,使其具有“防錯插”功能、安裝拆卸方便等特點。預測數(shù)據(jù)庫是FPSO串靠外輸安全指揮系統(tǒng)的核心,數(shù)值模擬計算的工作量較大,為了滿足預報和預警的功能時效性需要,依托經(jīng)典的勢流理論建立了模擬數(shù)據(jù)庫,并提出了系統(tǒng)數(shù)值模擬技術流程。硬件通信測試與軟件功能測試結果均表明,本文設計的FPSO串靠外輸安全指揮系統(tǒng)是可靠的,可以提升FPSO外輸作業(yè)的安全性。
[1]王強.FPSO串靠外輸時的多浮體系統(tǒng)響應分析[D].哈爾濱:哈爾濱工程大學,2010.Wang Qiang.Analysis of multi-body responses in FPSO tandem offloading operation[D].Harbin Engineering University,2010.
[2]周守為,曾恒一,范模.我國浮式生產(chǎn)儲油裝置的研制與開發(fā)[J].中國海上油氣,2006,18(2):73-77.Zhou Shouwei,Zeng Hengyi,F(xiàn)an Mo.Floating production,storage and offloading system researched and developed in China[J].China Offshore Oil and Gas,2006,18(2):73-77.
[3]范模,王春升,張理,等.八角形浮式生產(chǎn)儲油裝置關鍵技術與應用探索[J].中國海上油氣,2008,20(3):195-201.Fan Mo,Wang Chunsheng,Zhang Li,et al.Research on octa-gon FPSO key technology and its application in shallow waters[J].China Offshore Oil and Gas,2008,20(3):195-201.
[4]孫海,孫麗萍,樊紅元.FPSO串靠外輸?shù)臄嗬|可靠性與風險分析[J].哈爾濱工程大學學報,2011,32(1):11-15.Sun Hai,Sun Liping,F(xiàn)an Hongyuan.Reliability and risk analysis of a broken FPSO cable in tandem[J].Journal of Harbin Engineering University,2011,32(1):11-15.
[5]趙文華,胡志強,楊建民,等.FPSO系泊系統(tǒng)載荷計算與分析——基于南海“奮進號”FPSO運動特性實船[J].中國海上油氣,2011,23(2):116-121.Zhao Wenhua,Hu Zhiqiang,Yang Jianmin,et al.Calculation and analysis of the mooring loads of FPSO:based on the field measurement data of the motion characteristics of the Fenjin FPSO[J].China Offshore Oil and Gas,2011,23(2):116-121.
[6]楊家臣,鄭曉濤,朱進全.基于VS2010的FPSO外輸安全指揮系統(tǒng)的開發(fā)[J].石油機械,2013,41(10):60-64.Yang Jiachen,Zheng Xiaotao,Zhu Jinquan.VS2010-based development of FPSO outer transportation command system[J].China Petroleum Machinery,2013,41(10):60-64.
[7]劉應中,繆國平.船舶在波浪上的運動理論[M].上海:上海交通大學出版社,1987.Liu Yingzhong,Miao Guoping.Theory of ship's motion in waves[M].Shanghai:Shanghai Jiao Tong University Press,1987.
[8]CHEN H B,MOAN T,HAVER S,et al.Prediction of relative motion and probability of contact between FPSO and shuttle tanker in tandem offloading operation[J].Journal of Offshore Mechanics and Arctic Engineering,2004,126(3):235-242.
猜你喜歡
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
財經(jīng)(2017年2期)2017-03-10 14:35:35
故事大王(2016年7期)2016-09-22 17:30:08
財經(jīng)(2016年15期)2016-06-03 07:38:02
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
財經(jīng)(2016年3期)2016-03-07 07:44:46
財經(jīng)(2016年6期)2016-02-24 07:41:51