霍夫變換在智能車競賽中的應用
2015-04-29 14:57:45于洪
工業設計 2015年10期
于洪

摘 要:本文以智能車攝像頭所拍下的圖像,利用霍夫變換在圖像識別中的應用求出直線和彎道,并求出彎道的半徑和圓心,進而控制小車速度,以最佳速度通過賽道。
關鍵詞:霍夫變換;智能車;測圓半徑
飛思卡爾杯全國大學生智能車競賽從2008年起被教育部批準列入國家教學質量與教學改革工程資助項目中科技人文競賽之一(教高函[2007]30號文)。對于智能車的控制,現在主要有電磁、光電和攝像頭三種,其中基于攝像頭的控制最有實用性和發展性。當智能車的攝像頭獲取一幅圖像之后,需要對圖像數據進行處理,然后對圖像的內容進行分析、理解并從中抽取對智能車有用的信息。一般直線問題不大,關鍵是在彎道部位小車的速度控制。我們希望能有一種控制方法,讓小車能以彎道允許的最大速度通過。本文提出一種基于邊緣檢測和Hough變換的彎道檢測辦法,只要求出彎道半徑后,其最大允許速度也就可以求出。圖像中會存在大量的干擾,我們可采用空間域中的中值濾波法濾除脈沖干擾及圖像掃描噪聲,但又不會引起圖像細節模糊。
1 工作原理
霍夫變換是我們在數字圖像處理中從圖像中識別基本幾何形狀的方法,應用很廣泛,也有很多改進算法。Hough變換于1962年由Paul Hough提出,并在美國作為專利被發表。它實現的是一種從圖像空間到參數空間的映射關系。由于具有一些明顯優點和可貴性質,它引起了外學者和工程技術人員的普遍關注。例如,它可以根據局部度量來計算圖像的全面參數,所以對于圖形邊界被噪聲干擾或被其他目標遮蓋而引起邊界發生間斷的情況,它具有很好的容錯性和兼容性。多年來,專家們對Hough變換的理論性質和應用方法進行了深入而廣泛的研究, 取得了許多成績。
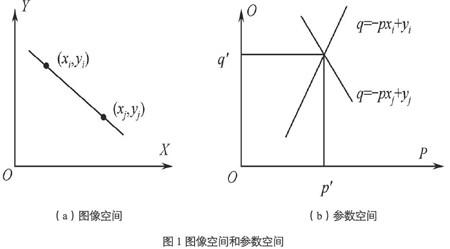
Hough基于點—線的對偶性,即在圖像空間(原空間)中同一條直線上的點對應在參數空間(變換空間)中是相交的直線。反過來,在參數空間中相交于同一點的所有直線,在圖像空間中都要有共線的點與之相對應。
通過霍夫變換,可以將圖像空間中直線的檢測問題轉化為參數空間中點的檢測問題。而參數空間中點的檢測只要進行簡單的累加統計就可以完成。這樣我們就可以方便地求出一條直線的方程。
如圖:
在實際應用中,y=k*x+b這種直線方程不能夠表示x=c形式的直線(因為這時直線的斜率為無窮大)。所以實際應用中,是采用極坐標方程p=x*cos( )+y*sin( )。這樣,圖像平面上的一個點就對應到參數p--- 平面上的一條曲線上,效果還是一樣。
當我們要檢測某一未知半徑的圓的時候,我們選擇與原圖像空間同樣的空間作為參數空間。可以看作是有三個參數的圓的檢測,中心和半徑。這個時候原理仍然相同,只是參數空間的維數升高,計算量增大。圖像空間中的任意一個點都對應了參數空間中的一簇圓曲線。其實是一個圓錐型。參數空間中的任意一個點對應了圖像空間中的一個圓。
(a)圖像空間 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(b)參數空間
圖1 圖像空間和參數空間
2 軟件設計
下面是我們利用極坐標表示圓的一種算法流程。將小車攝像頭所報圖像灰度化,二值化(注意:二值化的結果對檢測結果有很大影響,所以常要求做去噪處理,常用的有SOBEL算子)檢測圖像的邊緣點,并保存其坐標。設置角度 的變化范圍和步長及半徑R的變換范圍和步長。
利用公式x=a+Rcos( ? ),y=b+Rsin( ? )求出a和b的值。(注意:x和y為實際的圖像空間某個邊緣點的坐標,而a和b為其對應的參數空間的坐標),如果a和b的值在合理的范圍之類,則對該位置進行累加。
該算法通過a = x-R*cos( ? ),b = y-R*sin( ? )將圓圖像中的邊緣點映射到參數空間(a,b,R)中,由于是數字圖像且采取極坐標, ?和R都取一定的范圍和步長,這樣通過兩重循環( ?循環和R循環)即可將原圖像空間的點映射到參數空間中,再在參數空間(即由許多小立方體組成的大立方體)中尋找圓心,然后求出半徑坐標。
下面是我們用Matlab寫的程序:
其中TX:二值圖像; step_R:檢測的圓半徑步長 ?; step_ ? ? :角度步長,單位為弧度;R_min:最小圓半徑 ;R_max:最大圓半徑; p:以p*hough_space的最大值為閾值,p取0,1之間的數
圖2程序圖
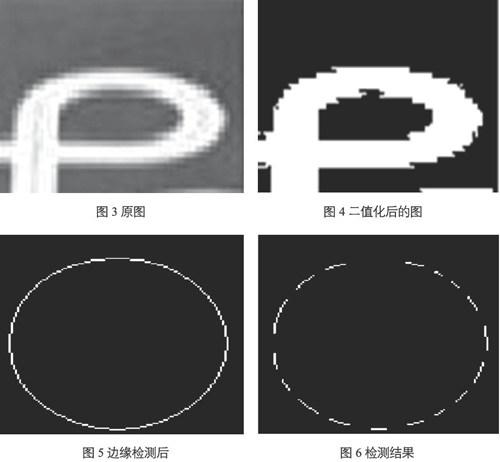
3 實驗結果
圖3原圖 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?圖4二值化后的圖
圖5邊緣檢測后 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?圖6檢測結果
檢測結果:CenteR 62 59 Radius 52
4 結語
此程序經實際運用可以比較可靠的得到圓的半徑,只要再將半徑和小車車輪轉彎角度聯系起來,就可以以比較快速的速度通過轉彎區域。
參考文獻:
[1] 曾接賢,王斌斌,陳志良.基于距離約束的隨機Hough變換直線檢測算法[J].南昌航空大學學報: 自然科學版.2011(03):7-11.
[2] 王明佳,張旭光,王延杰.利用廣義霍夫變換對相交目標進行軌跡預測[J].光學技術.2006(03):428-430.
[3] 王志明,唐冬梅,袁晶,等.童車變形量圖象處理中的霍夫變換的優化[J].機械設計與制造.2012(07):76-78.
[4] 謝季峰.基于霍夫變換的劃痕檢測算法應用[J].電腦知識與技術.
2012(20):4957-4958.
[5] 曹毓,馮瑩,楊云濤,等.RANSAC直線估計方法在路面三維點云優化中的應用[J].紅外與激光工程.2012(11):3108-3112.
[6] 夏奇,周明才,汪宏昇,等.高精度自動貼片機視覺對準系統及其圖像處理[J].光學技術.2004(02):146-149.
[7] 林蓁蓁,李慶,梁艷菊,等.一種基于路徑規劃的自動平行泊車算法[J].計算機應用研究.2012(05):1713-1715.
[8] 葉煒垚,王春香,楊明,等.基于虛擬障礙物的移動機器人路徑規劃方法[J].機器人.2011(03):273-278.
[9] 高德芝,段建民,楊磊,等.應用多階動態規劃的車道線識別方法[J].機械工程學報.2011(08):141-145.
[10] 王道斌,梁華為,楊妮娜,等.兩種自主泊車路徑規劃方法的對比研究[J].電子測量技術.2011(01):27-30.
[11] 林國余,陳旭,張為公.基于多信息融合優化的魯棒性車道檢測算法[J].東南大學學報: 自然科學版.2010(04):771-777.
[12] 劉富強,張姍姍,朱文紅,等.一種基于視覺的車道線檢測與跟蹤算法[J].同濟大學學報: 自然科學版.2010(02):223-229.
[13] 任孝平,蔡自興.基于阿克曼原理的車式移動機器人運動學建模[J].智能系統學報.2009(06):534-537.
[14] 張巧榮,顧國昌,肖會敏.視覺選擇性注意計算模型[J].機器人.
2009(06):574-580.
[15] 郭磊,李克強,王建強,等.應用方向可調濾波器的車道線識別方法[J].機械工程學報.2008(08):214-218.
本文系基金:海南省自然科學基金(60097),研究成果。
