基于MATLAB/Simulink的交流電機建模與仿真
2015-05-07 02:49:36王贊王紅平
機械工程師 2015年2期
王贊, 王紅平
(長春理工大學 機電工程學院,長春 130022)
0 引 言
計算機仿真技術是現代產品開發和科學實驗的新方法,特別是采用電力半導體件對電機進行交流調速的過程中,計算機仿真技術優勢巨大。MATLAB具有快速的數據處理能力和強大的圖像繪制能力。利用MATLAB中的Simulink的模型可以建立系統的仿真模型,從而可大大提高仿真的速度和準確度。本文利用MATLAB/Simulink構造一個交流電機模型,并根據得出的仿真結果,判斷其可靠性。
1 異步電機模型搭建
本文先求解了異步電機在兩相靜止α、β坐標系上的數學模型,如圖1所示,根據數學模型進行了建模和仿真。

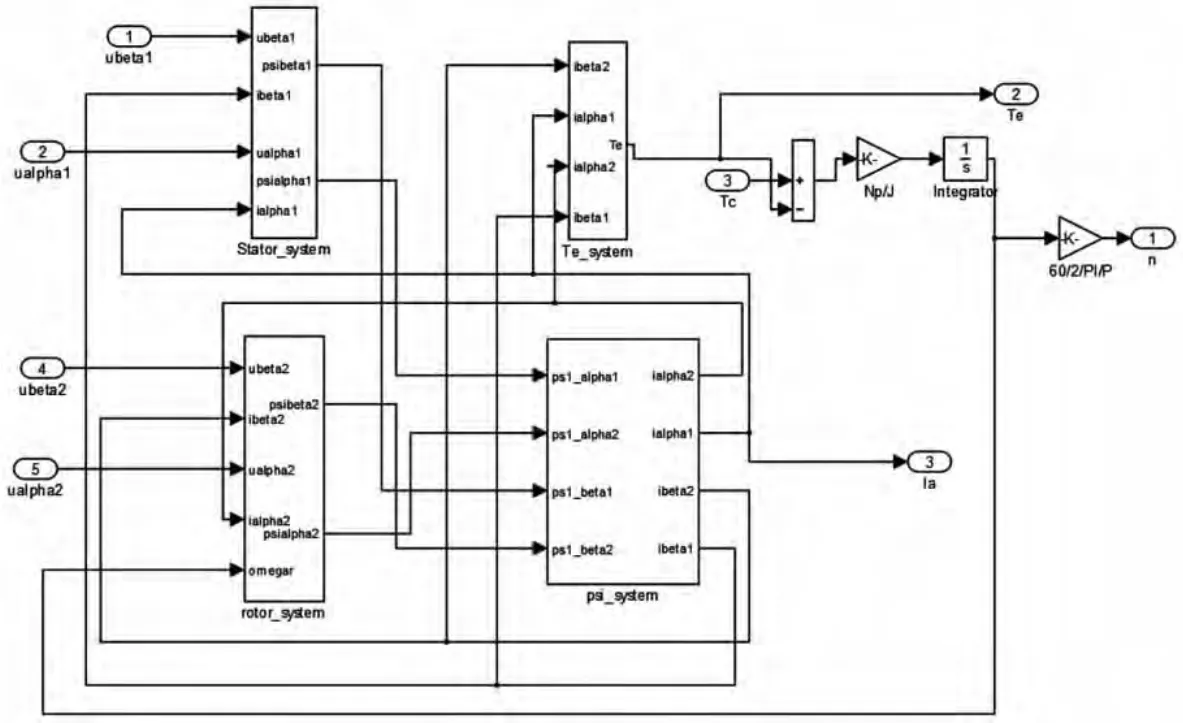
圖1 電機的建模與仿真
寫成狀態方程X′=AX+BU的形式:
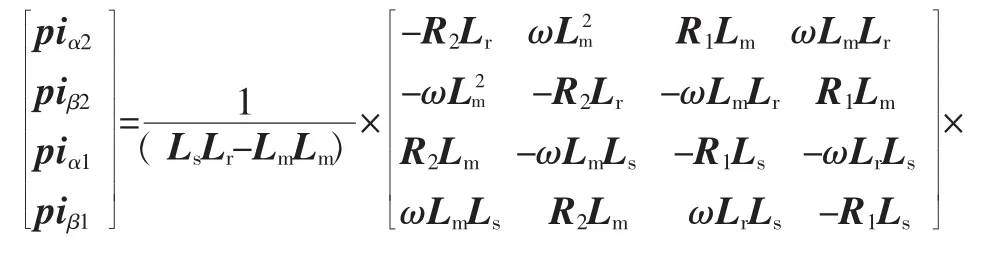
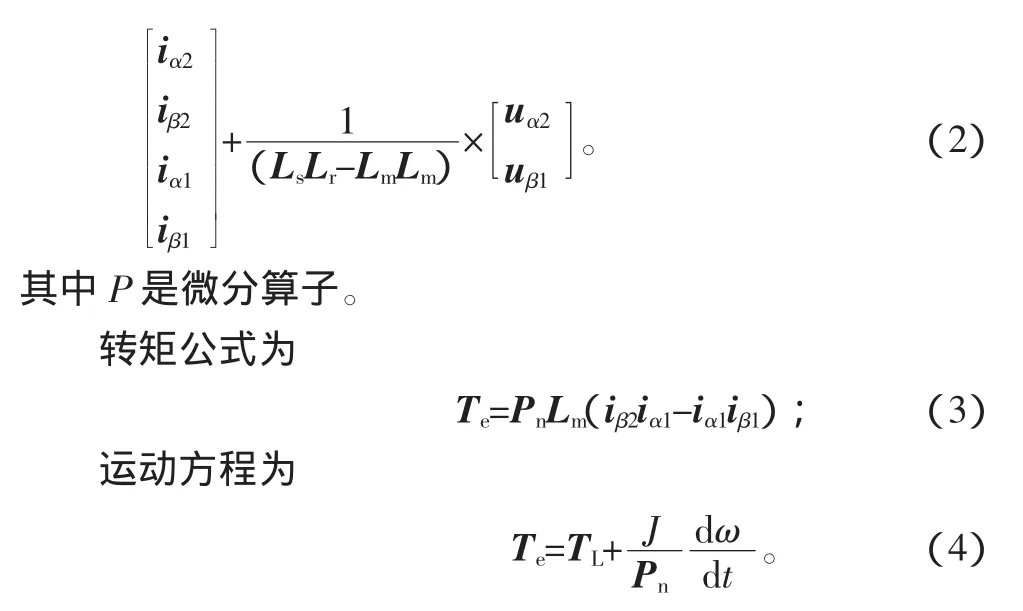
式中:Lr為轉子自感;Ls為定子的自感;Lm為定子和轉子的互感;R1為轉子的電阻;Pn為電機的極對數;R2為定子的電阻;J為電機的轉動慣量;ω 為電動機的角速度;iα1、iβ1表示轉子在 α、β 兩相靜止坐標系下的電流;iα2、iβ2表示定子在α、β兩相靜止坐標系下的電流。
MATLAB中異步電機的仿真模型可以利用式(2)、式(3)、式(4)進行搭建,因為在矩陣(1)含有變量,所以構建的是非定常系統。在此可以利用Simulink中模塊將矩陣(1)分解為時變和定常兩個矩陣,其形式如:A=A1×ω+A2,A1和A2表示兩個定常矩陣,然后根據公式得到向量化的矩陣和,最終搭建了如圖1所示的異步電機的仿真模型。

圖2 模塊的封裝
2 模型的封裝
所謂模型的封裝,為了簡化圖形,簡化功能模塊的個數,可以重復使用子系統,有利于建立多層次的模型,方便對模塊的選擇和利用,把模塊連接起來,最終就構成了子系統。模塊的封裝主要包括以下兩種形式:一是通過添加Subsystem模塊創建子系統;二是通過組合以后的模塊創建子系統。本文建立的交流異步電機的仿真模塊的封裝采用了第二種方式。模塊封裝圖如圖2所示。
3 異步電機的仿真與驗證
為了驗證搭建的模型是否正確,將電壓為380 V、頻率為50 Hz的三相正弦電壓通入電機中。在初始適合時,加負載T=8.00N·m的恒定轉矩,電機參數設定為:R1=4.03Ω,R2=3.05Ω,Ls=0.666 mH,Lr=0.670 mH,Lm=0.666 mH,J=0.01 kg/m2,Pn=2。然后將 iα2、iβ2進行坐標變換,獲得定子的三相電流ia、ib和ic,仿真出定子、轉矩和轉速的時間響應圖,如圖3~圖5所示。根據仿真波形可以知道,所搭建的仿真模型和異步電機的運行特性基本一致,因此所建立的電機的仿真模型正確。
4 結語
1)本文基于異步電動機在兩相靜止α、β坐標系上的數學模型搭建異步電動機的仿真模型。仿真結果表明,其數據準確、模型可靠,而且編制仿真模型方法簡單、具有可讀性,很容易實現擴展。
2)通過MATLAB搭建電動機模型,可以應用于后續的實驗仿真中。
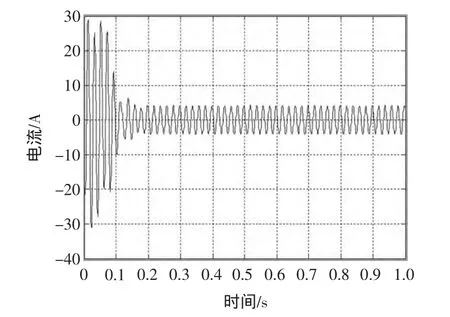
圖3 定子的時間響應
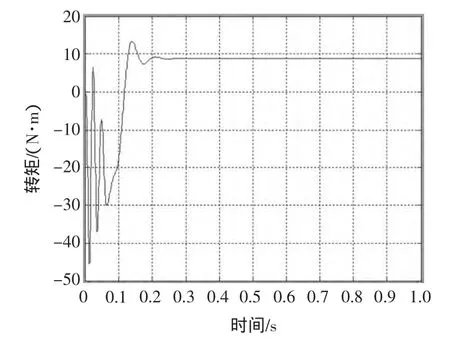
圖4 轉矩的時間響應
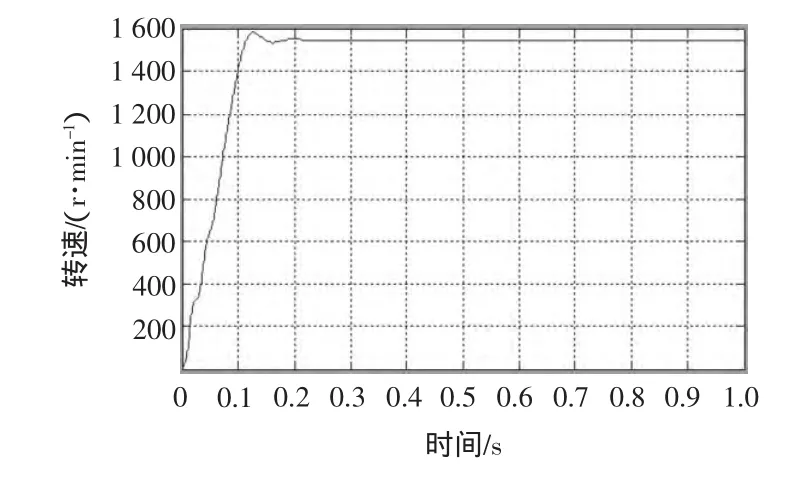
圖5 轉速的時間響應
[1] 周克亮,陳堅,康勇,等.基于MATLAB/SIMULIN,K的逆變器一交流電機系統的建模與仿真[C]//第5屆中國交流電機調速傳動學術會議論文集,1997.
[2] 陳伯時,陳敏遜.交流調速系統 [M].北京:機械工業出版社,1998:45-46.
[3] 付揚.籠型異步電機的建模與Simulink仿真[J].撫順石油學院學報,2003(1):74-78.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
科教新報(2022年12期)2022-05-23 06:34:16
今日農業(2021年14期)2021-10-14 08:35:28
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
海峽姐妹(2020年8期)2020-08-25 09:30:18
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
人民中國(日文版)(2015年10期)2015-04-16 03:53:58
人民中國(日文版)(2015年9期)2015-03-20 15:08:12