一種樹木涂白機械的設計與分析
2015-05-07 02:49:58李海超袁偉劉曉飛汪燁丁定成林兆海
機械工程師 2015年2期
關鍵詞:機械
李海超, 袁偉, 劉曉飛, 汪燁, 丁定成, 林兆海
(上海電機學院機械學院,上海200245)
0 引言
城市綠化是當今環保的一項重要內容,而樹木是綠化的先鋒。為了保證樹木的成活率,在樹干上涂刷石灰是必要的。一座城市每年樹木涂白所要投入的人力和物力將是一筆不小的開銷,而且工作人員要進行大量重復的勞作。手工涂白工作煩瑣、工作效率低、勞動強度較大,投入這么大的人力物力,但由于在人工進行樹木涂白時,涂白質量也無法統一,而導致工作效果又不怎么明顯,對于我們現在科技發達、機械化的現代社會,用一臺機器來代替這所有的工作,不僅會大大減輕人們的工作負擔,而且節省大量的人力資源。
1 樹木涂白機械的總體設計原理
在手推車上放置一個盛有石灰水的容器,為了防止石灰水凝固,在其上加入攪拌裝置,在容器的前端開有通孔,接有軟管,與輸出泵入口相接,將軟管另一端固定在機械手臂的內槽,并且軟管中間平面以下均勻開有小孔;機械手臂通過絲杠螺母機構運動到指定工作位置,在輸出泵的液壓力作用下將石灰水通過軟管小孔噴出,通過調節輸出泵功率來調節噴涂流量大小,其結構如圖1所示。
2 組成部件
1)機械手臂作為執行部件是本機械的核心,采用一對半圓形的夾子結構,其主要運動方案是通過齒輪杠桿式機械結構(詳見傳動機構)帶動機械夾子,以實現其張開與閉合。同時為了適應不同粗細樹木的噴刷工作,使其具有更為廣泛的實際應用價值,根據目前常見樹種及其不同時期的直徑,設計了3種尺寸的機械夾子,分別為350 mm、550 mm、750 mm;同時為了實現快速互換機械夾子,將夾子與機械手臂之間采用型面連接,并且做了可靠性校核,滿足要求。由于機械手臂主要是傳遞運動,受力較小,為了降低成本,同時減輕裝置整體質量,采用工程塑料,這種塑料能承受一定外力作用,具有良好的機械性能和耐高、低溫性能,尺寸穩定性較好。其結構如圖2、圖3所示。

圖1 整體裝配圖
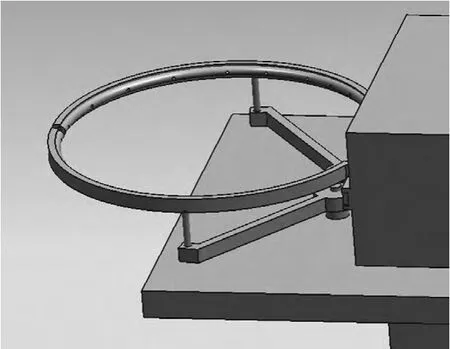
圖2 機械手臂
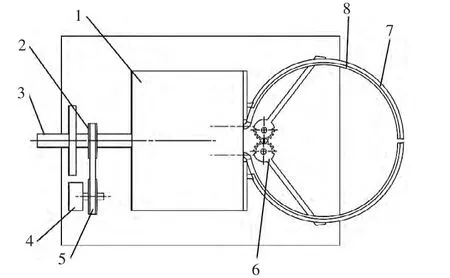
圖3 機械手臂簡圖
2)傳動機構。工作臺的上下運動,主要是依靠電機驅動絲杠螺母導軌上下運動,同時為了自鎖功能,采用單向超越離合器,結構如圖4所示。當螺母因為自重下滑,試圖讓星輪逆轉時,因為電機停止,外圈不會動,給滾柱反作用力,滾柱會被卡住,星輪以及用鍵與星輪連接的絲杠就不能逆轉)。工作臺的左右運動,這里我們也采用絲杠螺母運動機構來進行傳動(見圖5)。機械手臂末端執行器采用齒輪杠桿式手部,驅動桿末端制成雙面齒條,與扇齒輪相嚙合,而扇齒輪與機械夾子連接在一起,可繞支點回轉,驅動力推動齒條作直線往復運動,即可帶動扇齒輪回轉。從而實現機械夾子的開合。這種機械手部開合角較大,滿足設計要求。

圖4 單向超越離合器
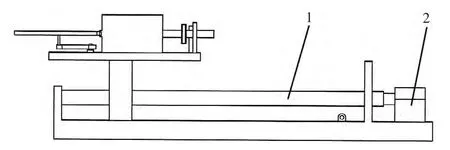
圖5 工作臺
動力系統:為便于長期連續使用,采用柴油機驅動,輸出功率為7.5 kW,配合離合器和變速箱使用;因為石灰水具有腐蝕性,輸出泵為特質高強度耐酸堿,輸出功率為5 kW;為了使液固流體保持懸浮狀態并順利輸出,加入攪拌裝置。
圖6 石灰水輸送系統
3 樹木涂白機械的工作過程
參考圖 7(a)~圖 7(e),第 1 步:主工作臺上升到預定涂白高度;第2步:機械手臂前伸至樹前,在電機的帶動下張開120°;第3步:機械手臂閉合;第4步:液壓泵工作,同時機械手臂下降;第5步:至樹底,機械手臂松開,機械手臂自動上升到涂白高度;第6步:推動下車至下一樹前,重復第3步~第5步。

圖7 工作簡圖
4 應力應變分析
機械手臂主要采用高強度塑料,質量較輕,對強度要求不高,故不進行應力應變分析,而全部裝置都安裝在手推車上,且手推車需進行長時間拖動,所以對小車進行有限元分析,結果如圖8所示。
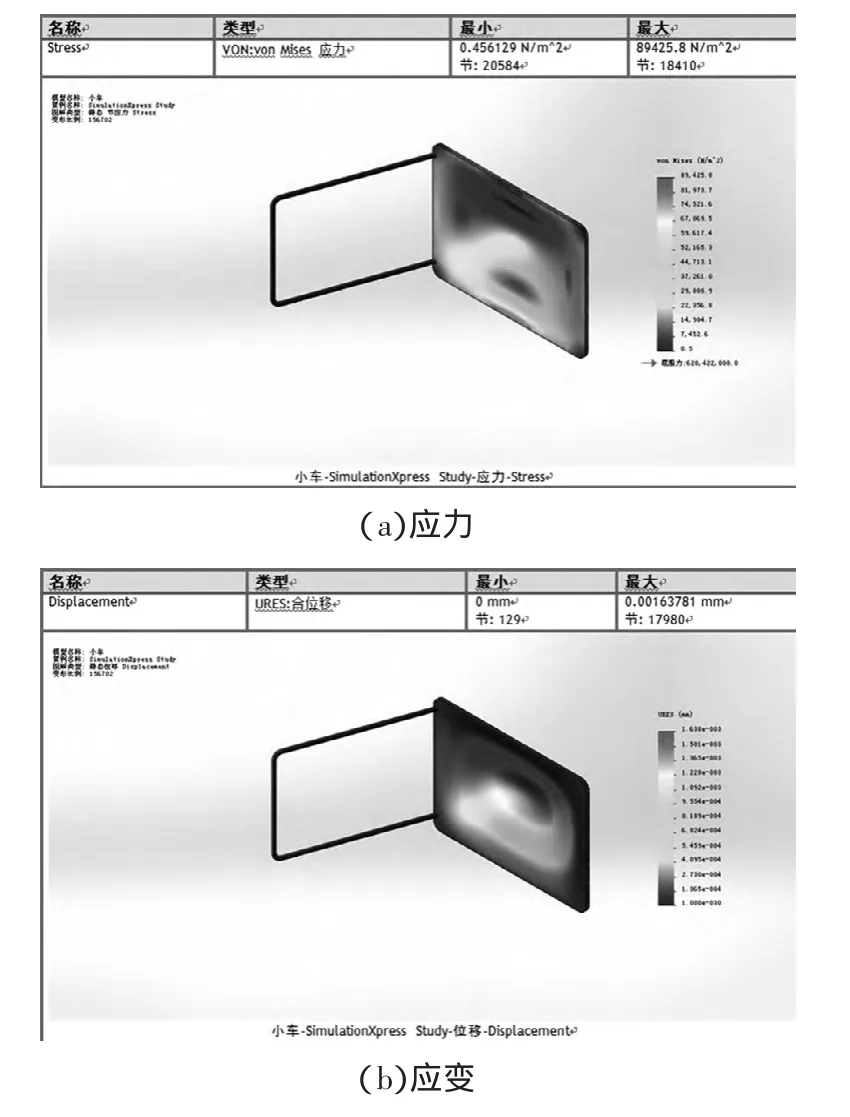
圖8
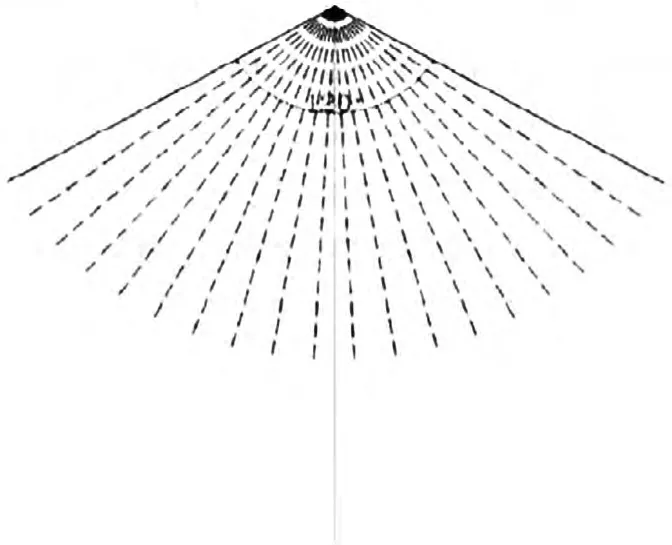
圖9 工作范圍示意圖
通過對結果分析,在小車中間部位應力集中且較大,變形量也較大,長時間使用將使小車面板壓彎,破壞機械正常工作條件,影響機械精確度,使機械達到預期使用壽命。
由上述結果分析,在小車底部加入肋板結構,增強其強度,剛度,和穩定性。
5 工作情況分析
噴射壓力:5~7 MPa;有效噴射角:120°;噴射半徑:300~500 mm;噴射流量:200~300 mL/s。
6 對比試驗
在制造出樣機后,我們進行了與傳統手工涂刷方式的對比試驗,實驗采取分組制,并且考慮了兩種直徑的樹木,實驗結果如表1所示,通過對比兩種涂白方式的用時,可以看出,機械涂白的方式確實大大提高了效率,并且對于直徑越大的樹木越明顯;此外在噴涂質量上較人工有大的提高,如圖10所示,基本達到全覆蓋,體現了機械裝置較人工高效率與高質量并存的特點。

圖10 手工涂白與機械涂白的效果比較

表1
7 結語
涂白機的研制很好地實現了樹木涂白的機械化,使傳統的勞動強度大、任務繁重、工作效率低的涂白方式轉變為低勞動強度、操作簡便、高效率的機械涂白方式。經項目實驗證明,機械噴涂方式涂白與人工涂刷方式涂白相比,平均每株樹木的涂白速度提高了約10倍,每株樹木節約成本約30%,具有廣闊的前景。
[1] 濮良貴,陳國定.機械設計[M].北京:高等教育出版社,2006.
[2] 陸明炯.實用機械工程材料手冊[M].沈陽:遼寧科學技術出版社,2004:
[2] 于慧力.機械設計學習指導[M].北京:科學出版社,2008.
[4] 郭洪紅.工業機器人技術[M].2版.西安:西安電子科技大學出版社,2012.
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09