基于PLS的拾放機械手位姿分析
2015-05-08 01:29:48余發山尹文寬劉根鋒
自動化儀表 2015年10期
余發山 尹文寬 劉根鋒
(河南理工大學電氣工程與自動化學院,河南 焦作 454000)
基于PLS的拾放機械手位姿分析
余發山 尹文寬 劉根鋒
(河南理工大學電氣工程與自動化學院,河南 焦作 454000)
為提高拾放機械手位姿的精確度,對采集到的末端執行器位移信號進行了研究。主要采用多分辨率小波變換法提取機械手運動時產生的位移信號的小波系數標準偏差作為特征矢量,將特征矢量輸入PLS進行特征提取和動作模式分類,最終實現了對拾放機械手位移信號的四種不同動作模式的分類。試驗結果表明,采用多分辨率小波變換法進行特征提取的PLS分類方法,具有更高的識別率,運算速度更快,對于拾放機械手的位姿分析具有一定的借鑒意義。
拾放機械手 位姿分析 偏最小二乘法(PLS) 小波變換 模式識別 特征提取
0 引言
機械手也可稱為操作機,具有和人臂相似的功能,可在空間抓放物體或進行其他操作的機械裝置。拾放料機械手按其結構可稱之為并聯結構機械手,并聯機械手由于具有剛度大、定位精度高、承載能力強、自重負荷比小、易實現高速及無積累誤差等特點,得到了極大的發展[1],在工業上主要進行自動識別、搬運、整列、分揀、組裝等操作[2]。
由于在拾放機械手進行位姿分析時采集到的位移信號存在干擾,文獻[3]在虛擬樣機的基礎上,通過采用D-H法建立專用機器人的位姿方程進行位姿分析。文獻[4]通過采用小波包變換在位姿分析前對位移信號進行去噪,有效消除了采集位移信號的干擾,提高了運動學的求解精度。文獻[5]通過設計基于反饋增益的反步法控制器消除機器人動態誤差模型中的部分非線性項,采用神經網絡對模型不確定性進行補償,并利用自適應魯棒控制器在線補償神經網絡的誤差,實現了移動機器人對任意位姿的精確分析。
本文采用多分辨率小波變換法提取機械手運動時產生的位移信號,將小波系數標準偏差作為特征矢量來計算,將特征矢量輸入偏最小二乘法(partial least square,PLS)進行特征提取和動作模式分類,PLS是一種能夠將線性相關的數據從高維空間投影到低維特征空間,并最終建立特征向量間的線性回歸關系的方法。目前模式識別大部分做法都是將特征提取和分類器分別進行設計,這會導致特征提取和分類器設計不能有機地結合起來,分類器的識別率和運行速度不理想。因此,尋求兩方面的有機結合,進一步提高識別性能,是一個日益關注的課題。
1 位移信號的小波分析
小波變換是一種新興的數學分支,通過伸縮和平移小波形成的小波基來分解(變換)或重構(反變換)時變信號的過程。在模式識別領域內,它是特征提取的一種經典方法。小波變換在時頻域內具有雙重定域和多分辨率分析的能力,因此能夠廣泛應用在信號處理、生物醫學和物理學等眾多領域[6]。
小波變換是基于傅里葉變換提出的一種“自適應變化”的時頻窗結構理論。它是一種時間—頻率域上的分析方法,通過有效特征向量,能夠減少計算量[7]。本文首先通過位移傳感器收集機械手在拾放過程中的位移信號,然后采用多分辨率小波分析變換法提取位移信號的小波系數的標準差,作為特征向量。
設ψ(t)是絕對可積且平方可積函數。

(1)
(2)
式(2)為小波的允許條件,其中ψ(ω)是ψ(t)的傅里葉變換。若ψ(t)滿足式(1)和式(2),稱ψ(t)為母小波,對母小波進行伸縮和平移后的函數為:

(3)
通常,ψa,τ(t)稱為小波基函數,其中a稱為伸縮因子,τ稱為平移因子。把有限信號f(t)和ψa,τ(t)做內積,即:

(4)
要使式(3)和式(4)逆變換存在,ψ(t)必須滿足條件:

(5)


(6)


(7)


(8)
式(6)表明,小波函數必然具有振蕩性。


(9)
隨著小波變換的發展,正交小波變換的快速算法的實現,產生了多分辨率(multi-resolution analysis,MRA)小波變換法。MRA是指對需要分析的信號f(t)進行多尺度的分解,并在各個尺度下處理分析,它用一系列的近似函數去逼近信號f(t)。不同尺度的小波函數構成的函數空間的基是不相同的,這體現了不同的頻率特性[7]。如果將信號f(t)不斷地向函數空間投影,就可以得到信號在其任何一個子空間中的分量值,從而實現了對小尺度對應的高頻分量和大尺度對應的低頻分量的分析。一般來說,低頻分量對應信號中的近似分量,高頻分量對應細節分量。這些近似分量和細節分量能充分表達信號的局部性能。因此,小波系數包含信號的重要信息可以作為分類器的特征向量。
離散序列x(n)的多分辨率分析可用Mallat算法求得:

(10)

(11)
式中:h0為一個低通濾波器,h1為一個高通濾波器;xj(n)為原始信號;f(t)的逐漸平滑,即反映了原始信號的近似(概貌)信息;dj(n)為x(j-1)(n)和x(j)(n)之間的差異,反映了信號的細節部分。
本文采用“db5”對機械手動作信號進行3層分解,結合式(8)和式(9)計算分解后的所有的近似分量和細節分量的標準偏差,作為特征向量。3層分解示意如圖1所示。

圖1 3層分解示意圖
圖1中,f(t)代表機械手動作信號,按照圖1結構對下移動作信號做3層分解,如圖2所示。

圖2 下移動作信號3層分解圖
2 位移信號PLS算法
分類器也稱作分類模型或者目標函數,其本質是設定一個目標函數f(x),將處理后樣本數據集的屬性x映射到已經設定好的類別標簽y上[8]。在模式分類中,分類器起到決策機制的作用,分類器設計的好壞直接影響模式識別的分類性能。常用分類器主要有bayes分類器、fisher分類器、BP神經網絡等。
偏最小二乘法(PLS)最早由Herman Wold于20世紀60年代提出,后來,Wold S和Haetens將其應用于化工過程[9]。PLS是最小二乘法的一個新發展,它不僅可以有效地克服普通最小二乘回歸方法的共線性問題,而且它在選取特征向量時強調自變量對因變量的解釋和預測作用,去除了對回歸無益噪聲的影響,完成了特征提取的過程,使模型具有更好的魯棒性和預測穩定性[10-11]。鑒于偏最小二乘法對自變量和因變量的解釋和預測作用,在一些文獻中又被稱為特征結構投影法[12-13]。
2.1 對于兩類動作分類問題
如果有m個自變量x1,x2,...,xm,n個因變量y1,y2,...,yn,用矩陣形式表示是X=[x1,x2,...,xm]T和Y=[y1,y2,...,yn]T。在本文中將Y矩陣稱為類別變量。它是一個n×1的列向量,元素只有0或1。假設一個樣本屬于第i類,則有yi=1,其他yj=0(j≠i)。PLS利用訓練樣本X和Y建立回歸模型,當輸入測試樣本時,利用已經建立的模型對變量Y進行分類預測[14]。PLS在進行回歸模型建立時,同時對自變量矩陣X和類別矩陣Y進行主成分提取,并盡可能使兩者的主成分在線性相關性上達到最大[15-16]。模型建立過程如下。
① 計算X相對于X的主成分向量t的負荷向量:
pT=tTX/(tTt)
(12)
式中:t和后式中的u的計算具體計算參考。
② 計算Y相對于Y的主成分向量u的負荷向量:
qT=uTY/(uTu)
(13)
③ 計算u對t的回歸系數
β=uTt/(tTt)=tTu/(tTt)
(14)
④ 計算X的殘差矩陣
E=X-tpT
(15)
⑤ 計算Y的殘差矩陣
F=Y-βtqT=Y-tbT
(16)
其中:

(17)
⑥ 令X=E、Y=F,重復步驟①~⑤,計算下一個主成分向量,直至X的秩為0,全部成分計算完畢。通常迭代次數k一般不超過10次。
⑦ 預測時根據p求出待測樣本的主成分向量t′,然后根據下式求出預測值:
y′=t′bq
(18)
類別判定規則為:y′=1,待測樣本為第1類;y′=0,待測樣本為第2類。
2.2 對于多類動作判別問題
PLS對于分多類問題,是建立在分兩類問題的基礎上的,即所謂的一對多法構造PLS多值分類器。具體方案是:文中下移、上移、左移和右移共4類,利用3個PLS子分類器實現四分類。第一個分類器將第一類和其他三類分開,第二個分類器將第二類和第三、第四類分開,第三個分類器將第三類和第四類分開,最后將3個分類器相互連接就構成了四類分類器。四分類示意圖如圖3所示。
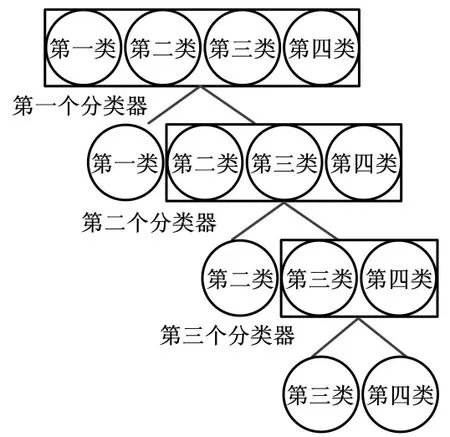
圖3 四分類示意圖
3 PLS算法結果分析
本文是以鄭州潤華工業自動化有限公司生產的拾放料機械手作為研究對象,通過使用位移傳感器從機械手拾放操作過程中得到所需數據。
機械手共有下移、上移、左移、右移4種動作模式,分別用1、2、3、4表示。每種動作采集1 000個數據。對各個動作模式動作進行3層小波分解后取系數的標準偏差作為特征項。每個模式共8個特征項,將PLS算法中進行主元分析時累積貢獻率設置為92%。訓練樣本數目取280個,測試樣本取120個。為了能比較PLS的識別率能力強弱,在樣本和其他條件相同的情況下,將PLS算法與貝葉斯、BP神經網絡、RBF神經網絡和fisher算法進行對比。
PLS分類結果如圖4所示,每個樣本的縱坐標就是它的類別歸屬。

圖4 PLS分類圖
從圖4可以直觀地看出只有下移動作分類有錯誤的情況,正確識別率(120-7)/120=94.2%。下面是有無主成分分析(principal component analysis,PCA)降維的比較,PLS算法與貝葉斯、BP神經網絡、RBF神經網絡和fisher算法對比分析如表1所示。

表1 各個算法對比分析
從表1可以看出,PLS識別率高于貝葉斯、BP神經網絡和fisher等分類器。為了便于比較,將數據進行PCA降維,取累積貢獻率為92%,數據從8維降維3維,然后分別用貝葉斯、BP神經網絡、RBF神經網絡和fisher算法進行模式識別。表2是降維后的算法對比。表2中,1代表PCA+Bayes算法;2代表PCA+BP算法;3代表PCA+RBF;4代表PCA+Fisher算法;5代表PLS算法。

表2 結合PCA各個算法識別率
從表2可以看出,經過PCA降維處理后,Bayes、BP神經網絡和fisher等算法識別比不降維有所提高,但總體還是低于PLS算法的識別率。在測試中我們發現PLS比BP(RBF)神經網絡魯棒性好,運算速度快,fisher運算速度有點慢,如果樣本可區分度不大,fisher算法需要幾分鐘左右。正因為PLS算法具有較好的魯棒性、運算速度快,其才被廣泛地用于過程建模和過程控制方面。
4 結束語
偏最小二乘法(PLS)是主元分析(PCA)、主元回歸(PCR)、典型相關分析(CA)等多種數據處理方法有機結合的綜合應用,它可以預測分析和數據處理分析,實現了特征提取和分類器設計的有機結合,可以達到較好的識別能力。PLS是一種多線性回歸軟測量建模統計分析方法。它將多元回歸問題轉化為若干個一元問題,適用于樣本數目少而變量之間存在多重相關性且變量數目多的建模情況,這是傳統經典算法沒有的優點。因此,本文提出的PLS算法對拾放機械手位姿分析有一定的借鑒意義。
[1] 趙永杰.高速輕型并聯機械手動態設計理論方法[D].天津:天津大學,2006.
[2] Miler K.Maximization of workspace volume of 3-DOF spatial parallet[J].ASME Journal of Mechanical Design,2002,124(2):347-350.[3] 楊萍,寧鵬,張淑珍,等.水輪機修復專用機器人的位姿分析[J].機械設計,2004,10(10):11-13.
[4] 游輝勝,方康玲,薛孝琴.基于matlab小波包的工業機器人位姿分析[J].機器人技術,2008,24(2):215-216.
[5] 賈鶴鳴,宋文龍,陳子印,等.基于神經網絡反步法的移動機器人路徑跟蹤控制[J].南京理工大學學報,2014,2(1):27-33.
[6] 麻書欽,范海峰.基于小波變換和時間序列的網絡流量預測模型[J].河南理工大學學報:自然科學版,2013,32(2):189-192.
[7] 荊雙喜,簡彥成,冷軍發.礦用通風機滾動軸承振動故障診斷研究[J].河南理工大學學報:自然科學版,2012,31(6):698-701.
[8] 秦鋒,楊波,程澤凱.分類器性能評價標準研究[J].計算機技術與發展,2006,16(10):86-88.
[9] 廖春華,杜建強,程春雷,等.改進的偏最小二乘法回歸推薦算法[J],江西師范大學學報:自然科學版,2012,36(6):627-630.
[10]Nouna K, Anders B, Svante W.PCA and PLS with very large data sets[J].Computational Statistics & Data Analysis, 2005 (48) :69-85.
[11]Svante W, Michael S,Lennart E. PLS-regression: a basic tool of chemometrics[J].Chemometrics and Intelligent Laboratory Systems,2001(58) :109-130.
[12]王桂增,葉昊.主元分析與偏最小二乘法[M].北京:清華大學出版社,2012:41-45.
[13]寧祿喬.PLS算法研究[D].天津:天津大學,2006.
[14]董學鋒,戴連奎,黃承偉,等.結合PLS-DA與SVM的近紅外譜軟測量方法[J].浙江大學學報:工學版,2012,46(5):825-829.
[15]樓安平,楊新.基于偏最小二乘法與支持向量金的人臉識別[J].計算機仿真,2005,22(12):166-168.
[16]Wold H. Nonlinear estimation by iterative least squares procedures[C]. Research Papers in Statistics,New York:Wiley, 1996.
Position and Attitude Analysis Based on PLS for Pick & Place Manipulator
To improve the accuracy of the posture of manipulator, the displacement signals collected from end effector are researched. The standard deviation of wavelet coefficients of the displacement signal generated by manipulator movement is extracted by adopting multi-resolution wavelet transform, and then used as characteristic vector for calculation. The characteristic vector is input partial least square (PLS), for feature extraction and motion pattern classification, finally, classification for four of the motion patterns of displacement signals of pick & place manipulator is implemented. The test results show that the PLS classification method using multiresolution wavelet transform for feature extraction possesses higher recognition rate, faster operation speed, this provide reference significance for position and attitude analysis for pick & place manipulators.
Pick & place manipulator Analysis of position and attitude Partial least square Wavelet transform Pattern recognition Feature extraction
余發山(1952-),男,1977年畢業于焦作礦業學院電氣工程專業,獲學士學位,教授;主要從事自動化與工業過程控制等方面的教學及科研工作。
TP241+.2;TH-3
A
10.16086/j.cnki.issn1000-0380.201510003
修改稿收到日期:2015-03-11。
猜你喜歡
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年15期)2019-08-27 01:12:00
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
電子制作(2018年11期)2018-08-04 03:25:42
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
中國生物醫學工程學報(2017年6期)2017-02-10 05:11:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
