微納衛星共面伴飛相對運動橢圓短半軸最省燃料控制
2015-05-10 05:46:58周美江吳會英齊金玲
中國空間科學技術 2015年5期
周美江 吳會英 齊金玲
(上海微小衛星工程中心,上海201203)
微納衛星共面伴飛相對運動橢圓短半軸最省燃料控制
周美江 吳會英 齊金玲
(上海微小衛星工程中心,上海201203)
針對伴隨微納衛星資源受限、軌控需要盡可能節省燃料的現實問題,基于希爾(Hill)方程,研究推導了共面編隊伴飛衛星的軌控時機和軌控方向對相對運動橢圓短半軸控制效率的影響。理論推導和仿真均表明:當控制量大小|ΔV|與相對運動橢圓短半軸b滿足|ΔV|≤nb/2關系時(n為參考星平均軌道角速度),在相對運動橢圓上下點進行橫向或反橫向控制,最大效率地將相對運動橢圓短半軸改變了|Δb|=2|ΔV|/n。其中,在上點反橫向或下點橫向進行控制,可以最大效率地增大橢圓短半軸;在上點橫向或下點反橫向進行控制,可以最大效率地減小橢圓短半軸。
共面伴飛;希爾方程;橢圓短半軸;最省燃料控制;控制時機;控制方向;微納衛星
1 引言
隨著航天技術的不斷發展和航天器應用水平的逐漸提高,多顆小衛星編隊飛行協同開展航天任務已從概念驗證轉向實際應用。尤其是共面編隊伴飛技術。由于在航天器故障診斷、空間目標立體成像等方面的巨大應用價值,該概念一提出就受到高度重視,以美國為代表的航天強國,更是將微納衛星伴飛技術應用于空間目標監視和空間攻防對抗等領域[1-3]。
由于編隊衛星功能的實現很大程度上依賴于編隊構型,編隊構型控制已成為編隊衛星發展的關鍵技術之一。編隊飛行的航天器間相對距離較近,可在相對運動框架下進行分析。常用的相對運動描述方法有兩種[4]:一是基于兩航天器軌道要素的運動學方法;二是基于兩航天器相對位置速度狀態的動力學方法,也稱希爾(Hill)方程。運動學方法以兩航天器的軌道要素為輸入,適用范圍廣,外推精度高,目前很多編隊構型控制以此為基礎[5-6]。但由于軌道要素是隨時間逐漸累積的慢變量,其抗擾動性能較差,對于有星間相對實時測量的編隊構型控制問題,觀測狀態量需要進行轉換,應用復雜。對于主星為圓軌道、相對距離較近的編隊構型控制問題,將Hill方程進行線性化處理,可得到解析解。基于Hill方程解析解進行編隊構型控制,模型物理含義清晰,相對觀測量實時輸入,計算量小,魯棒性強,非常適用于有星間實時相對測量的星上自主編隊構型控制問題。
對于共面編隊伴飛構型控制來講,相對運動橢圓短半軸的控制尤為重要。筆者所在團隊前期基于微納衛星只能進行橫向或徑向控制,對最高效率的相對運動橢圓短半軸控制時機進行了求解[7-8],本文將在前期工作的基礎上,對共面編隊伴飛構型控制中相對運動橢圓短半軸最省燃料控制的控制方向和控制時機進行系統求解,并用仿真去驗證理論推導。
2 相對運動方程解
由Hill方程可知,伴隨衛星在軌道面內相對參考星的相對運動解為相對軌道坐標系(x軸由地心指向參考星質心,為徑向;y軸在軌道面內垂直于x軸沿飛行方向,為橫向;z軸為軌道面法向)下長半軸為短半軸兩倍的橫向漂移橢圓,得到相對運動的幾何解和參數解如下[9]:

式中 n為參考星平均軌道角速度;(xc,yc)為相對運動橢圓中心;b為相對運動橢圓短半軸; Θ=nt+θ為伴隨衛星在相對運動橢圓上的相位[10],θ為初始相位。
任一時刻t伴隨衛星相對參考星在軌道面內相對狀態分量(x,y,˙x,˙y) 已知,橢圓中心、橢圓短半軸和相位可寫成:
3 最省燃料控制問題的提出
推進系統消耗燃料轉化為推力,一段時間內的推力作用使航天器動量(速度)改變,即燃料消耗相當于為航天器提供了一速度增量,所以最省燃料控制問題可等效為最小速度增量(也稱控制量)控制問題。
將軌道面內的控制量ΔV分解為橫向控制量ΔVy=ΔV cosφ和徑向控制量ΔVx=ΔV sinφ(ΔV為控制量的大小;φ為控制方向角,從相對軌道坐標系的正y軸起算,逆時針旋轉為正)。由式(4)可知,橫向控制和徑向控制均會改變橢圓短半軸。設橫向控制量ΔVy與徑向控制量ΔVx使橢圓短半軸改變Δb,由式(4)可知

式(6)中兩式相減并考慮式(2),可得

式(7)為Δb的一元二次方程,有兩個數學解

引入中間變量

則式(8)可寫為


由式(11)可知,控制量大小ΔV一定時,橢圓短半軸改變量Δb與控制時機Θ和控制方向φ相關。
微納衛星資源和能源都嚴重受限,希望控制時盡可能節省燃料。對橢圓短半軸大小的控制來講,即希望選擇合適的控制方向和控制時機匹配,使控制量一定時控制效率最高(即ΔV一定時,求解使Δb最大的φ與Θ的匹配)。引入中間變量λ=ΔV/(nb)>0,式(9)進一步化簡為

由式(12)可知,中間變量A為控制方向φ和控制時機Θ的二元連續函數,求其最大值。
A對控制時機Θ求一階偏導數

A對控制方向φ求一階偏導數

A對控制時機Θ求二階偏導數

A對控制方向φ求二階偏導數

A對控制時機Θ和控制方向φ求二階混合偏導數,由于二階混合偏導數連續,有

A取極值的必要條件之一為“一階偏導數為0”,即

推得

4 最省燃料控制問題解的討論
對式(19)的解分情況討論如下。
4.1 cosΘ=0或cosφ=0
由式(18)可知,cosΘ=0與cosφ=0同時成立,即在左右點徑向或反徑向施加控制。
(1)Θ=90°,φ=90°(左點徑向)或Θ=-90°,φ=-90°(右點反徑向)

若A取極值,則必有

此時

當λ=1時,從物理意義上判定也為極值。即當λ≥1時,取極小值,此時橢圓短半軸改變量為

可能增大也可能減小橢圓。即在左點徑向或右點反徑向控制,當λ≥1,即ΔV≥nb時,考慮控制量從零逐漸加到ΔV,橢圓短半軸先減小到0后又增大,最終結果可能比初始橢圓短半軸小,也可能比初始橢圓短半軸大:
1)當1≤λ≤2,即nb≤ΔV≤2nb時,橢圓短半軸最終比初始橢圓短半軸小或等于初始橢圓短半軸;
2)當λ>2,即ΔV>2nb時,橢圓短半軸最終比初始橢圓短半軸大。
(2)Θ=90°,φ=-90°(左點反徑向)或Θ=-90°,φ=90°(右點徑向)

此時

恒成立,非極值,此時橢圓短半軸改變量為

肯定使橢圓短半軸增大。
4.2 cosΘ≠0且cosφ≠0(非左右點徑向或反徑向控制)
由式(19)可得

解算得到

討論兩個解的情況如下。
(1)sinφ=0且sinΘ=0,即在上下點橫向或反橫向施加控制
1)φ=0°,Θ=0°(上點橫向控制)或φ=180°,Θ=180°(下點反橫向控制)時:

若A取極值,則必有

此時

當λ=1/2時,從物理意義上判定也為極值。即當λ≤1/2時,取極小值,此時橢圓短半軸改變量為

肯定減小橢圓。即當0<λ≤1/2,0<ΔV≤nb/2時,上點橫向或下點反橫向控制是極大效率減小橢圓的控制方向和控制時機匹配,此時橢圓短半軸減小2ΔV/n。
2)φ=180°,Θ=0°(上點反橫向控制)或φ=0°,Θ=180°(下點橫向控制)時:

此時

恒成立,且

A取極大值。此時橢圓短半軸改變量為

肯定增大橢圓。即在上點反橫向或下點橫向控制時,極大效率地將橢圓短半軸增大2ΔV/n。
(2)cosΘ=2λcosφ且sinΘ=λsinφ
由式(2)可知,相對運動橢圓的矢徑(起點為瞬時相對運動橢圓中心,終點為伴隨衛星在橢圓上的位置)斜率為

控制量矢量斜率為

式(37)與式(38)相乘并考慮前提條件cosΘ=2λcosφ且sinΘ=λsinφ,得到

即控制方向垂直于矢徑方向,且與相對運動方向成鈍角,如圖1所示,實線箭頭表示矢徑方向,虛線單箭頭表示控制方向,虛線雙箭頭表示相對運動方向。
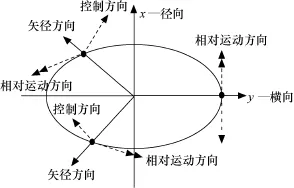
圖1 控制方向垂直于矢徑方向示意Fig.1 Control direction vertical to the radius vector



將橢圓減小為零。
由

得到1/2<λ<1,即當nb/2<ΔV<nb時,在任何時機,控制方向垂直于矢徑方向進行控制(此時控制方向與相對運動方向成鈍角),橢圓短半軸減小為零。控制量ΔV的大小即λ的值,由具體的控制時機Θ或控制方向φ按公式cosΘ=2λcosφ及sinΘ=λsinφ進行求解。
此外,由λ2=1/4+(3/4)sin2Θ可知:
1)當sin2Θ→0時,Θ→0°或180°,在趨于相對橢圓上下點進行控制,λ→1/2極小值,即ΔV→nb/2;
2)當sin2Θ→1時,Θ→±90°,在趨于相對橢圓左右點進行控制,λ→1極大值,即ΔV→nb;
5 理論推導結論
對所有推導總結如下:
結論1 無論λ取何值,即ΔV=λnb取何值,在上點反橫向控制,或在下點橫向控制,都是最大效率增大橢圓短半軸的控制方式。
結論2 當0<λ≤1/2,即0<ΔV≤nb/2時,在上點橫向控制,或在下點反橫向控制,最大效率減小橢圓短半軸。
結論3 當1/2<λ<1,即nb/2<ΔV<nb時,在非上下左右點的其他控制時機,垂直于矢徑方向(且滿足控制方向與相對運動方向成鈍角)進行控制,最大效率減小橢圓短半軸至0,此時,控制量與控制時機滿足cosΘ=2λcosφ且sinΘ=λsinφ。
結論4 當λ≥1,即ΔV≥nb時,在左點徑向控制,或在右點反徑向控制:
1)當1≤λ≤2,即nb≤ΔV≤2nb時,若控制量從0逐漸加到ΔV,橢圓短半軸先減小到0后又增大,但橢圓短半軸最終比初始值小,屬于極大浪費燃料減小橢圓的控制方式。
2)當λ>2,即ΔV>2nb時,若控制量從0逐漸加到ΔV,橢圓短半軸先減小到0后又增大,但橢圓短半軸最終比初始值大,屬于極大浪費燃料增大橢圓的控制方式。
也就是說,最大效率增大橢圓短半軸的控制方向和控制時機匹配是一定的,最大效率減小橢圓短半軸的控制方向和控制時機匹配則與控制量的取值區間有關。
6 仿真驗證
設置一組仿真算例:參考星O為500 km圓軌道,交點周期T=5 676.978 s,伴隨衛星A相對參考星O共面伴飛,初始伴飛橢圓短半軸b=5 158.606 m。在二體模型下,利用STK導出A相對O的初始軌道數據,基于Hill方程,對A在不同控制時機施加大小一定、方向不同的控制量,用Matlab編程求解橢圓短半軸的變化量。
針對不同λ取值區間對應結論不同的情況,設置λ=0.25、λ=0.75、λ=1.5、λ=2.5四組算例,對應不同λ取值區間,得到橢圓短半軸改變量與控制方向和控制時機的三維曲面和對應的二維投影如圖2~圖17所示。
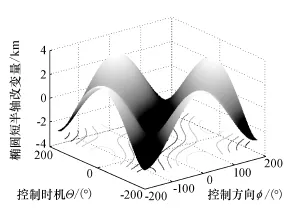
圖2 λ=0.25時Δb與φ和Θ的關系Fig.2 Relationship betweenΔb and φ,Θwhileλ=0.25
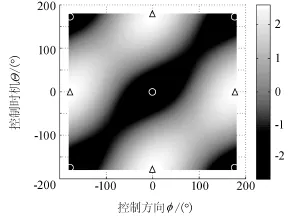
圖3 λ=0.25時Δb在φ和Θ平面內的投影Fig.3 Δb projection in control direction-control time plane whileλ=0.25
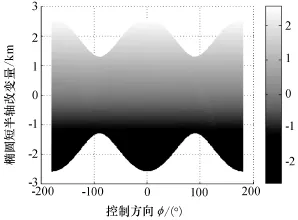
圖4 λ=0.25時Δb與φ和Θ的關系(Δb和φ面內投影)Fig.4 Projection relationship betweenΔb andφ,Θ: inΔb-φplane whileλ=0.25
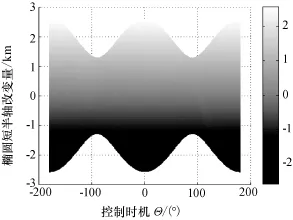
圖5 λ=0.25時Δb與φ和Θ的關系(Δb和Θ面內投影)Fig.5 Projection relationship betweenΔb與φ,Θ: inΔb-Θplane whileλ=0.25
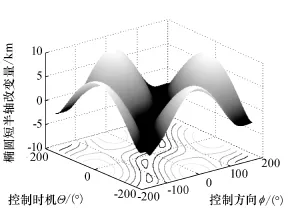
圖6 λ=0.75時Δb與φ和Θ的關系Fig.6 Relationship betweenΔb and φ,Θwhileλ=0.75
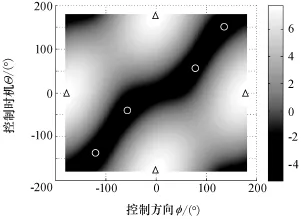
圖7 λ=0.75時Δb在φ和Θ平面內的投影Fig.7 Δb projection in control direction-control time plane whileλ=0.75

圖8 λ=0.75時Δb與φ和Θ的關系(Δb和φ面內投影)Fig.8 Projection relationship betweenΔb andφ,Θ: inΔb-φplane whileλ=0.75
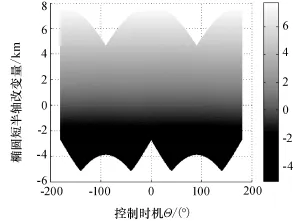
圖9 λ=0.75時Δb與φ和Θ的關系(Δb和Θ面內投影)Fig.9 Projection relationship betweenΔb andφ,Θ: inΔb-Θplane whileλ=0.75
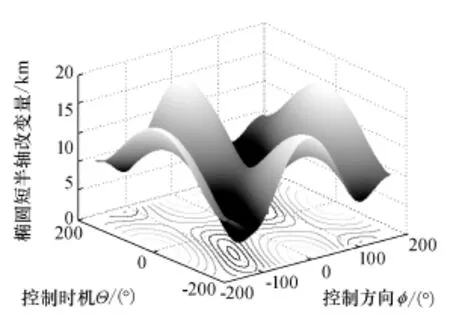
圖10 λ=1.5時Δb與φ和Θ的關系Fig.10 Relationship betweenΔb and φ,Θwhileλ=1.5

圖11 λ=1.5時Δb在φ和Θ平面內的投影Fig.11 Δb projection in control direction-control time plane whileλ=1.5
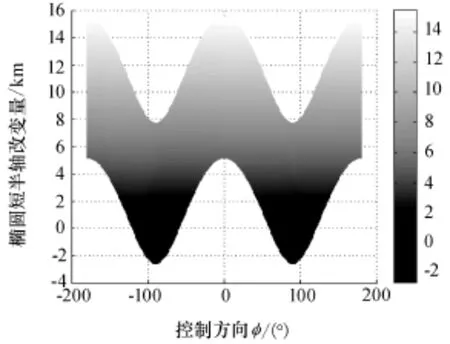
圖12 λ=1.5時Δb與φ和Θ的關系(Δb和φ面內投影)Fig.12 Projection relationship betweenΔb andφ,Θ: inΔb-φplane whileλ=1.5
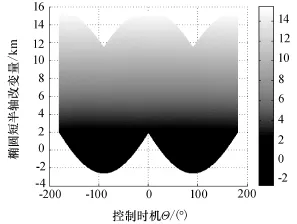
圖13 λ=1.5時Δb與φ和Θ的關系(Δb和Θ面內投影)Fig.13 Projection relationship betweenΔb andφ,Θ: inΔb-Θplane whileλ=1.5
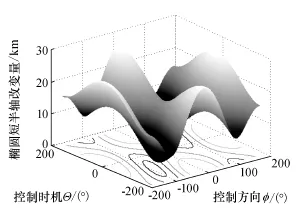
圖14 λ=2.5時Δb與φ和Θ的關系Fig.14 Relationship betweenΔb and φ,Θwhileλ=2.5
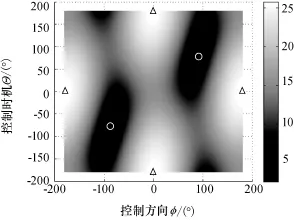
圖15 λ=2.5時Δb在φ和Θ平面內的投影Fig.15 Δb projection in control direction-control time plane whileλ=2.5
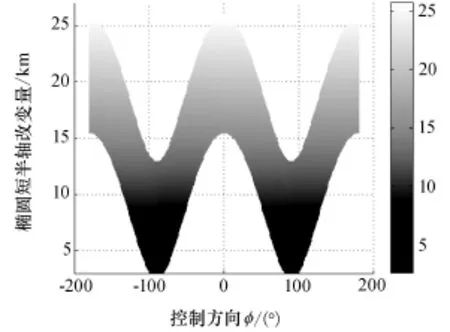
圖16 λ=2.5時Δb與φ和Θ的關系(Δb和φ面內投影)Fig.16 Projection relationship betweenΔb andφ,Θ: inΔb-φplane whileλ=2.5
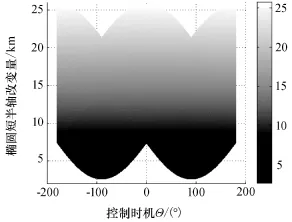
圖17 λ=2.5時Δb與φ和Θ的關系(Δb和Θ面內投影)Fig.17 Projection relationship betweenΔb andφ,Θ: inΔb-Θplane whileλ=2.5
圖3、圖7、圖11和圖15具有分布相同的四個極大值點(圖中用△標出):φ=0°,Θ=±180° (下點橫向控制)和φ=±180°,Θ=0°(上點反橫向控制),表明無論λ取值如何,在上點反橫向或下點橫向控制都是最大效率增大橢圓短半軸的方式,與結論1相符。
圖3中五個極小值點(圖中用○標出):φ=0°,Θ=0°(上點橫向控制)和φ=±180°,Θ=±180° (下點反橫向控制),表明當λ<1/2時,在上點橫向或下點反橫向控制是最大效率減小橢圓短半軸的方式,與結論2相符。
圖11和圖15具有分布相同的兩個極小值點:φ=90°,Θ=90°(左點徑向控制)和φ=-90°, Θ=-90°(右點反徑向控制),表明當λ>1時,在左點徑向或右點反徑向控制,對橢圓短半軸大小改變效率最低,與結論4中“極大浪費燃料”改變橢圓大小的理論推導相符。
圖7中四個極小值點的相關數據如表1所示。

表1 λ=0.75時四個極小值點控制方向與矢徑方向的關系Tab.1 Relationship between control direction and radius vector in 4 minimum points whileλ=0.75
由表1可知,四個極小值點對應控制方向和矢徑方向基本垂直(k1k2→-1),k1k2與-1的微小差別與仿真步長相關,當仿真步長趨近于無限小時,k1k2=-1。即當1/2<λ<1時,垂直于矢徑方向進行控制最大效率減小橢圓短半軸,與結論3相符。
對不同λ取值區間的仿真結果均驗證了理論推導的正確性。實際應用時,考慮節省燃料原則,若需減小橢圓短半軸,最多將橢圓短半軸減小到0即可,選擇在相對運動橢圓上點橫向控制或在下點反橫向控制,控制量ΔV=nΔb/2最小。最終得到關于最大效率改變橢圓短半軸的控制方向和控制時機匹配關系:在相對運動橢圓上下點進行橫向或反橫向控制,是最大效率改變橢圓短半軸的控制方式(其中:在上點反橫向或下點橫向控制最大效率增大橢圓短半軸;在上點橫向或下點反橫向控制最大效率減小橢圓短半軸)。
7 結束語
本文在筆者團隊前期對共面伴飛相對運動橢圓短半軸大小控制效率問題研究的基礎上,基于Hill方程和二元函數極值理論,系統地對共面伴飛問題中控制方向和控制時機對橢圓短半軸大小控制效率的影響進行了推導,并通過仿真對理論推導進行了驗證。研究成果可用于航天器共面伴飛控制中相對運動橢圓短半軸的最省燃料控制問題求解。此外,本文提供了一種共面伴飛控制中最省燃料控制問題的求解思路。下一步,筆者將在此基礎上繼續對航天器共面伴飛控制中其他參量的最省燃料控制問題進行求解,并對各參量的耦合控制問題進行深入研究。
[1] 李焱,康開華.美國空間監視系統最新發展及趨勢分析[J].航天器工程,2008,17(2):76-82.
LI YAN,KANG KAIHUA.Research and analysis on development of US space based surveillance system[J]. Spacecraft Engineering,2008,17(2):76-82.
[2] 任飛.美發射近地軌道監視衛星[J].中國航天,2014(10):23-24.
REN FEI.Space surveillance craft launched by Delta 4 rocket[J].Aerospace China,2014(10):23-24.
[3] 張召才.美國深挖小衛星潛力,欲提升軍事用天能力[J].衛星應用,2015(2):37-44.
[4] 張育林,曾國強,王兆魁,等.分布式衛星系統理論及應用[M].北京:科學出版社,2008:25-40.
ZHANG YULIN,ZENG GUOQIANG,WANG ZHAOKUI,et al.Fundamentals of near-earth spacecraft orbit[M].Beijing:Science Press,2008:25-40.
[5] 曾國強,張育林.編隊飛行隊形設計一般化方法[J].中國空間科學技術,2003,23(1):12-16.
ZENG GUOQIANG,ZHANG YULIN.Generalized method of formation flying configuration design[J]. Chinese Space Science and Technology,2003,23(1):12-16.
[6] 韋娟,袁建平.小衛星編隊飛行的相對運動學方程研究[J].飛行力學,2002,20(2):29-32.
WEI JUAN,YUAN JIANPING.Research of relative kinematics on small satellite formation flying[J]. Flight Dynamics,2002,20(2):29-32.
[7] 吳會英,陳宏宇,余勇,等.遠距離軌道接近及繞飛控制技術研究[J].中國空間科學技術,2010,30(1): 25-33.
WU HUIYING,CHEN HONGYU,YU YONG,et al.Study of long-distance approaching and companion flying technology[J].Chinese Space Science and Technology,2010,30(1):25-33.
[8] 吳會英,陳宏宇,周美江,等.伴隨衛星軌控時機與相對運動橢圓大小控制效率的關系 [J].載人航天, 2013,19(5):90-96.
WU HUIYING,CHEN HONGYU,ZHOU MEIJIANG,et al.Research on relation between orbit control time and control efficiency of company satellites[J].Manned Spaceflight,2013,19(5):90-96.
[9] 郗曉寧,王威,高玉東.近地航天器軌道基礎[M].長沙:國防科技大學出版社,2003:244-251.
XI XIAONING,WANG WEI,GAO YUDONG.Fundamentals of near-earth spacecraft orbit[M].Changsha: National University of Defense Technology Press,2003:244-251.
[10] 吳會英,周美江,齊金玲.基于跡向控制量的編隊星群相位控制[J].空間控制技術與應用,2014,40(6): 31-35.
WU HUIYING,ZHOU MEIJIANG,QI JINLING.Formation phase control based on the along-track control strategy[J].Aerospace Control and Application,2014,40(6):31-35.
作者簡介
周美江 1989年生,2012年獲哈爾濱工業大學飛行器設計專業碩士學位,工程師。研究方向為航天器軌道動力學與控制。
Minimum Fuel Control of Relative Ellipse Semi-Minor Axis in Micro/nano-Satellite In-Plane Companion-Flying
ZHOU Meijiang WU Huiying QI Jinling
(Shanghai Engineering Center For Microsatellites,Shanghai 201203)

In-plane companion-flying;Hill equation;Ellipse semi-minor axis;Minimum fuel control;Control time;Control direction;Micro/nano satellite
10.3780/j.issn.1000-758X.2015.05.004
(編輯:高珍)
2015-04-01。收修改稿日期:2015-05-26
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
商周刊(2017年9期)2017-08-22 02:57:49
時代英語·高二(2015年1期)2015-03-16 00:08:11
小天使·一年級語數英綜合(2015年2期)2015-01-14 06:35:05