基于CANopen協(xié)議的公鐵兩用牽引車運動控制實現(xiàn)
2015-05-11 04:21:14趙大興趙國棟
制造業(yè)自動化 2015年23期
趙大興,趙國棟,許 萬,王 璜
(湖北工業(yè)大學 機械工程學院,武漢 430068)
基于CANopen協(xié)議的公鐵兩用牽引車運動控制實現(xiàn)
趙大興,趙國棟,許 萬,王 璜
(湖北工業(yè)大學 機械工程學院,武漢 430068)
0 引言
隨著我國鐵路運輸業(yè)和城市軌道交通的快速發(fā)展,傳統(tǒng)的公鐵兩用牽引車難以滿足現(xiàn)場作業(yè)需求[1]。傳統(tǒng)公鐵兩用牽引車的液壓運動控制系統(tǒng)響應速度慢、穩(wěn)定性差、不能實現(xiàn)反饋、運動控制誤差偏大,使得牽引車的動力性能、操作性能、工作效率無法達到要求[2]。
以電能作為驅(qū)動的新型公鐵兩用牽引車控制系統(tǒng)[3],引入在汽車總線網(wǎng)絡中占主導地位的CAN總線[4],采用廣泛應用于歐洲的工業(yè)現(xiàn)場總線協(xié)議CANopen[5]通訊協(xié)議,為實現(xiàn)公鐵兩用牽引車的運動控制提供了可靠性高、實時性強的狀態(tài)獲取和命令下發(fā)通道[6,7]。
分析公鐵兩用牽引車機械結(jié)構(gòu)及主要參數(shù);設計牽引車運動控制CAN總線網(wǎng)絡,完成CANopen協(xié)議通訊初始化設置,包括各CANopen設備節(jié)點ID(Node_ID)和CAN標示符(COB_ID)的分配,通信模型、通信速率、通信對象的設置;分析牽引車的運動速度和轉(zhuǎn)向角度,得出了牽引車運動控制理論計算公式,包括行走電機頻率與平移速度關系式,轉(zhuǎn)向電機頻率與轉(zhuǎn)向速度關系式,橡膠輪轉(zhuǎn)向角位移誤差計算公式,為牽引車的運動控制提供了理論依據(jù),使得牽引車的運動速度誤差和轉(zhuǎn)向角度誤差在允許的范圍之內(nèi),保證牽引車運動控制精度,提高了牽引車控制系統(tǒng)的可靠性。
1 牽引車機械結(jié)構(gòu)及主要參數(shù)
公鐵兩用牽引車機械結(jié)構(gòu)如圖1所示,主要包括底盤,車架,控制單元,液壓單元,驅(qū)動轉(zhuǎn)向單元。控制單元由車載無線接收器,手持無線遙控器組成。液壓單元由油泵電機,齒輪油泵,電磁換向閥,萬向輪,前導向輪,后導向輪組成。驅(qū)動轉(zhuǎn)向單元由行走電機,減速箱,轉(zhuǎn)向電機,轉(zhuǎn)向直齒輪副,橡膠輪組成。
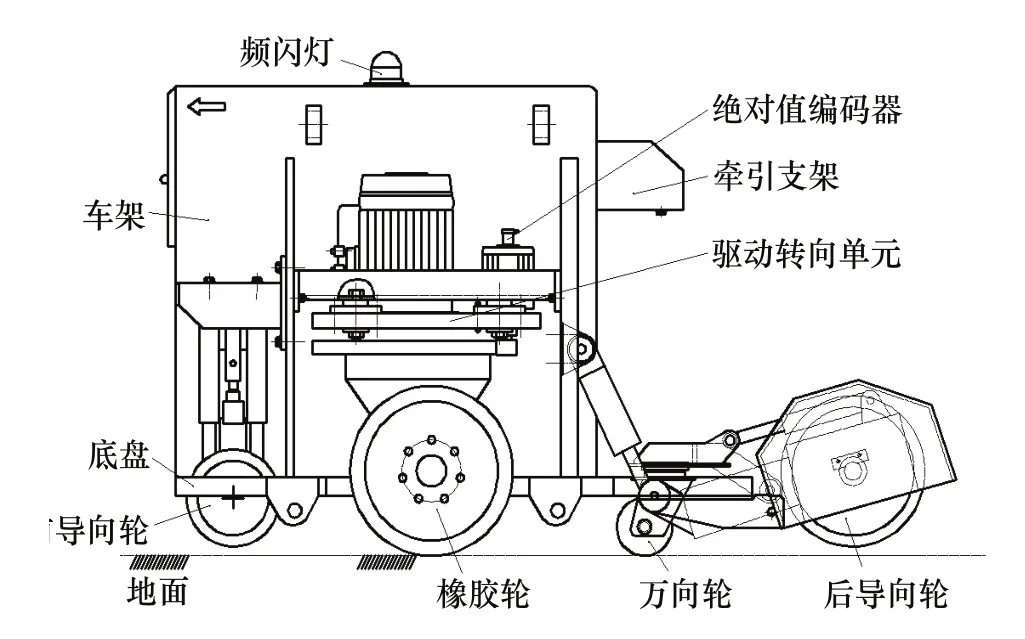
圖1 公鐵兩用牽引車機械結(jié)構(gòu)圖
公鐵兩用牽引車驅(qū)動轉(zhuǎn)向單元三維模型如圖2所示,驅(qū)動轉(zhuǎn)向單元作為整車的執(zhí)行機構(gòu),是牽引車的重要組成部分。牽引車機械傳動配置方式為:驅(qū)動輪與轉(zhuǎn)向輪合一,橡膠輪既是驅(qū)動輪也是轉(zhuǎn)向輪。轉(zhuǎn)向方式為:雙舵輪轉(zhuǎn)向方式。
牽引車驅(qū)動轉(zhuǎn)向單元主要參數(shù)如表1所示,公鐵兩用牽引車的運動控制本質(zhì)上是驅(qū)動轉(zhuǎn)向單元的運動控制,驅(qū)動轉(zhuǎn)向單元各部件的主要參數(shù)直接影響著牽引車的運動控制。

圖2 驅(qū)動轉(zhuǎn)向單元三維模型圖

表1 驅(qū)動轉(zhuǎn)向單元主要參數(shù)
2 牽引車運動控制總線網(wǎng)絡設計
2.1 CAN總線網(wǎng)絡拓撲結(jié)構(gòu)
牽引車運動控制CAN總線網(wǎng)絡拓撲結(jié)構(gòu)及各CANopen設備節(jié)點ID(Node_ID)分配如圖3所示。CAN總線網(wǎng)絡由兩條信號線CAN_H和CAN_L、兩個120Ω的終端電阻、可編程控制器(ID=30)、左行走電機驅(qū)動器(ID=9)、右行走電機驅(qū)動器(ID=8)、左轉(zhuǎn)向電機驅(qū)動器(ID=17)、右轉(zhuǎn)向電機驅(qū)動器(ID=16)、左絕對值編碼器(ID=1)、右絕對值編碼器(ID=2)組成。CAN總線通信介質(zhì)是雙絞線,避免了電磁信號的干擾。由于總線傳輸距離不超過40m,選用的終端電阻為120Ω,消除總線兩端導線上的信號反射,避免信號失真。
2.2 CANopen協(xié)議初始化設置
CANopen協(xié)議通信模型為主從通信模型,可編程控制器(PLC)是CAN總線上唯一的主機,其余設備均為從機。通信速率為250kbit/s,保證數(shù)據(jù)傳輸?shù)膶崟r性,且不易受外界電磁干擾。4種通信對象的功能分別為:
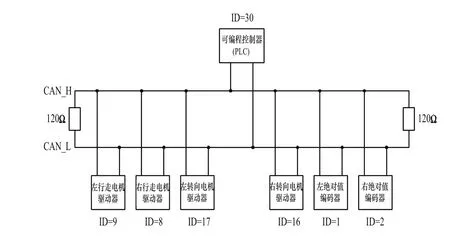
圖3 CAN總線網(wǎng)絡拓撲結(jié)構(gòu)及節(jié)點ID分配
1)服務數(shù)據(jù)對象(SDO):訪問絕對值編碼器對象字典(OD),完成編碼器初始化設置。
2)過程數(shù)據(jù)對象(PDO):傳輸行走電機、轉(zhuǎn)向電機頻率的設定值,實時反饋頻率的實際值;實時反饋橡膠輪轉(zhuǎn)向角度。
3)網(wǎng)絡管理對象(NMT):可編程控制器(PLC)是唯一的主節(jié)點,管理整個網(wǎng)絡,其余設備均為從節(jié)點。左右絕對值編碼器作為從節(jié)點,以100ms的周期向主節(jié)點發(fā)送心跳報文(Heartbeat)。
4)預定義報文或特殊功能對象:同步對象(SYNC),保證兩橡膠輪驅(qū)動和轉(zhuǎn)向的同步性與協(xié)調(diào)性;緊急事件對象(Emergency),顯示各設備內(nèi)部錯誤。
運動控制總線網(wǎng)絡中各設備均為標準化協(xié)議的CANopen設備,則牽引車運動控制總線CAN標識符(COB_ID)的分配如表2所示。
3 牽引車運動控制分析
3.1 牽引車速度控制
公鐵兩用牽引車運動狀態(tài)包括縱向平移,橫向平移,對角線平移,圓周轉(zhuǎn)向。可編程控制器(PLC)通過CANopen協(xié)議發(fā)送頻率設定值到總線網(wǎng)絡,左右行走電機驅(qū)動器、左右轉(zhuǎn)向電機驅(qū)動器同時接收到報文,同步驅(qū)動左右行走電機、左右轉(zhuǎn)向電機,實現(xiàn)牽引車的平移和轉(zhuǎn)向。
公鐵兩用牽引車速度控制包括平移速度控制和轉(zhuǎn)向速度控制,控制方式均為開環(huán)控制。通過改變行走電機和轉(zhuǎn)向電機的頻率實現(xiàn)平移速度控制和轉(zhuǎn)向速度控制。行走電機頻率與牽引車平移速度關系式,轉(zhuǎn)向電機頻率與牽引車轉(zhuǎn)向速度關系式由以下公式可得。


表2 運動控制總線CAN標識符(COB_ID)分配表
在不考慮三相交流異步電機轉(zhuǎn)差率的情況下,行走電機轉(zhuǎn)速:

轉(zhuǎn)向電機轉(zhuǎn)速:
聯(lián)立式(1)~式(5)可得行走電機頻率:

聯(lián)立式(6)、式(7)可得轉(zhuǎn)向電機頻率:

以上式中,v3為橡膠輪平移線速度,m/s;r為橡膠輪半徑,m;3ω為橡膠輪平移角速度,rad/s;d為橡膠輪直徑,m;n3為橡膠輪平移轉(zhuǎn)速,r/min;i1為行走機構(gòu)總傳動比;n1為行走電機轉(zhuǎn)速,r/min;f1為行走電機頻率,Hz;p1為行走電機磁極對數(shù);n2為轉(zhuǎn)向電機轉(zhuǎn)速,r/min;f2為轉(zhuǎn)向電機頻率,Hz;p2為轉(zhuǎn)向電機磁極對數(shù);i2為轉(zhuǎn)向機構(gòu)總傳動比;n4為橡膠輪轉(zhuǎn)向轉(zhuǎn)速,r/mim。
牽引車在功率一定的情況下,在公路上自由行走時,需要減小牽引力,增加速度,牽引車能運行在高速檔5km/h或者低速檔3km/h;在鐵路上進行牽引作業(yè)時,需要降低速度,增大牽引力,牽引車只能運行在低速檔3km/h。已知行走機構(gòu)總傳動比i1=22.78,行走電機磁極對數(shù)p1=2,橡膠輪直徑d=406mm,橡膠輪平移線速度v3=3km/h或5km/h,分別代入式(8)可得行走電機頻率f1=29.78Hz或49.64Hz。最終設定行走電機低速頻率f1=30Hz,高速頻率f1=50Hz,由式(5)可得行走電機低速轉(zhuǎn)速n1=900r/min,高速轉(zhuǎn)速n1=1500r/min。
為保證橡膠輪轉(zhuǎn)向角度的精度,牽引車轉(zhuǎn)向速度設定為3r/min。已知轉(zhuǎn)向電機磁極對數(shù)p2=2,轉(zhuǎn)向機構(gòu)總傳動比i2=305.27,橡膠輪轉(zhuǎn)向轉(zhuǎn)速n4=3r/min,代入式(9)可得轉(zhuǎn)向電機頻率f2=30.5Hz。最終設定轉(zhuǎn)向電機頻率f2=30Hz,由公式(6)可得轉(zhuǎn)向電機轉(zhuǎn)速n2=900r/min。
3.2 牽引車轉(zhuǎn)向角度控制
公鐵兩用牽引車轉(zhuǎn)向角度控制主要是橡膠輪轉(zhuǎn)向角度控制,控制方式為開環(huán)控制,同時絕對值編碼器安裝在轉(zhuǎn)向電機尾端的輸出軸上,實時跟蹤橡膠輪的轉(zhuǎn)向角度。根據(jù)設定角度,設置相應的減速點,當橡膠輪轉(zhuǎn)到減速點時,轉(zhuǎn)向電機驅(qū)動器的輸入頻率降低,完全釋放轉(zhuǎn)向電機的加速器,轉(zhuǎn)向電機的轉(zhuǎn)速開始降低,最終使得橡膠輪轉(zhuǎn)到設定角度。
橡膠輪轉(zhuǎn)向軌跡如圖4所示,A為右轉(zhuǎn)極限點也是編碼器零點,B為右轉(zhuǎn)極限減速點,C為右轉(zhuǎn)調(diào)直減速點,D為調(diào)直復位點也是機械零點,E為左轉(zhuǎn)調(diào)直減速點,F(xiàn)為左轉(zhuǎn)極限減速點,G為左轉(zhuǎn)極限點。其中AB=CD=DE=FG。橡膠輪轉(zhuǎn)到A點、G點和D點時,牽引車實現(xiàn)橫向平移和調(diào)直復位功能。
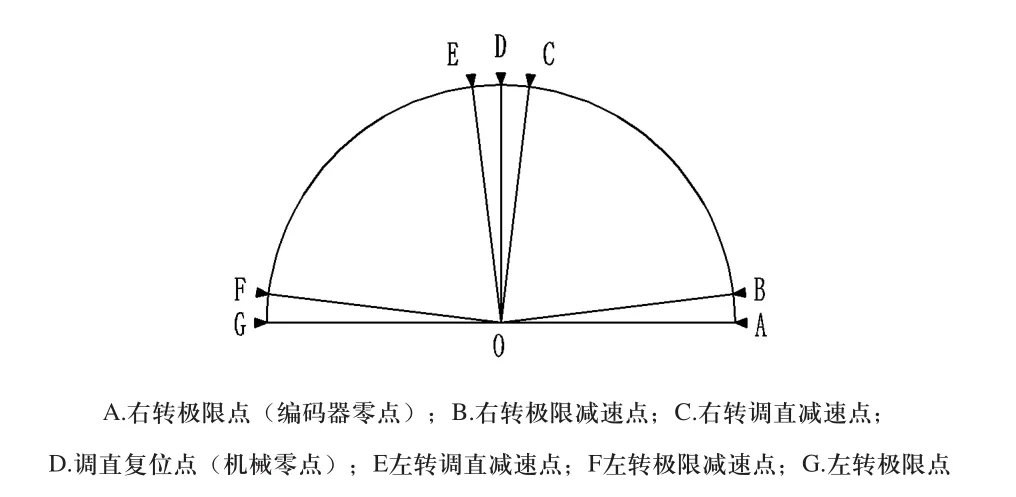
圖4 橡膠輪轉(zhuǎn)向軌跡
假設未設置減速點,因延時誤差的存在,最終橡膠輪會轉(zhuǎn)過設定點而產(chǎn)生誤差,其中產(chǎn)生的角位移誤差即為減速點與設定點之間的角位移。橡膠輪角位移誤差包括編碼器反饋延時角位移誤差和轉(zhuǎn)向電機減速延時角位移誤差,由以下公式計算可得。

聯(lián)立式(10)~式(16)可得橡膠輪角位移誤差:

以上式中,ω2為轉(zhuǎn)向電機角速度,rad/s;n2為轉(zhuǎn)向電機轉(zhuǎn)速,r/min; 為編碼器反饋延時角位移,rad;t1為編碼器反饋延遲時間,s;a為轉(zhuǎn)向電機減角速度,rad/s2;ωt為轉(zhuǎn)向電機末角速度,rad/s;為轉(zhuǎn)向電機末轉(zhuǎn)速,r/min;t2為轉(zhuǎn)向電機減速延遲時間,s;?θ2為轉(zhuǎn)向電機減速延時角位移,rad;?θ3為轉(zhuǎn)向電機角位移,rad;?θ為橡膠輪角位移誤差,rad;i2為轉(zhuǎn)向機構(gòu)總傳動比。已知編碼器反饋延遲時間t1=0.1023s,轉(zhuǎn)向電機減速延遲時間t2=0.75s,轉(zhuǎn)向電機轉(zhuǎn)速n2=900r/min,轉(zhuǎn)向電機末轉(zhuǎn)速nt=0r/min,代入公式(17)可得橡膠輪角位移誤差?θ=0.04π=7.2°,即AB=CD=DE=FG=0.04,則A點設為0°,B點設為7.2°,C點設為82.8°,D點設為90°,E點設為97.2°,F(xiàn)點設為172.8°,G點設為180°。
4 測試結(jié)果分析
在公路模式空載狀態(tài)下,牽引車運動控制總線監(jiān)控數(shù)據(jù)如圖5所示。圖5(a)將編碼器零點與機械零點的偏差值保存在右絕對值編碼器中,編碼器進入運行狀態(tài)。圖5(b)橡膠輪調(diào)直復位,牽引車以實際速度2.97km/h平移前進。
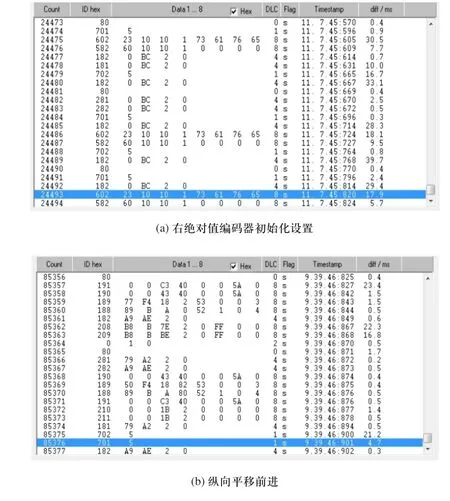
圖5 牽引車運動控制總線數(shù)據(jù)監(jiān)控
牽引車速度控制實際值與理論值如表3所示,左右行走電機實際速度相同,左右轉(zhuǎn)向電機實際速度相同,保證左右橡膠輪運動控制的同步性與協(xié)調(diào)性;由于三相交流異步電機轉(zhuǎn)差率的存在,行走電機和轉(zhuǎn)向電機的實際反饋速度比理論設定速度降低了1.6%,速度誤差在允許范圍之內(nèi),保證牽引車的運動速度控制精度。
牽引車轉(zhuǎn)向控制實際值與理論值如表4所示。左右橡膠輪之間的相對位置誤差小于0.5°,左右橡膠輪轉(zhuǎn)向的理論設定位置與實際位置之間的平均誤差為0.95°,誤差主要由左右驅(qū)動轉(zhuǎn)向機構(gòu)的安裝精度和控制系統(tǒng)延時滯后所引起。左右兩輪相對位置誤差,理論位置與實際位置誤差均在允許范圍之內(nèi),保證牽引車的轉(zhuǎn)向角度控制精度。
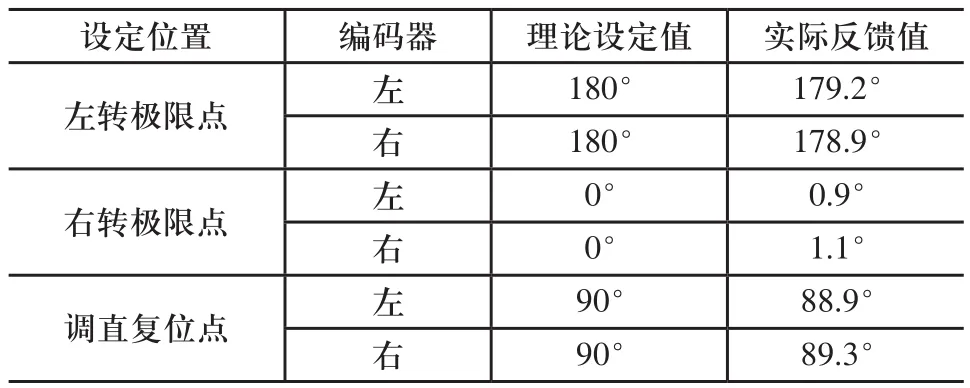
表4 牽引車轉(zhuǎn)向控制實際值與理論值
5 結(jié)論
分析公鐵兩用牽引車的機械結(jié)構(gòu)及主要參數(shù);設計牽引車運動控制CAN總線網(wǎng)絡,完成了CANopen協(xié)議通訊的初始化設置,為實現(xiàn)公鐵兩用牽引車的運動控制提供了可靠性高、實時性強的狀態(tài)獲取和命令下發(fā)通道;分析牽引車的運動速度和轉(zhuǎn)向角度,得出了牽引車運動控制理論計算公式,為牽引車的運動控制提供了理論依據(jù)。測試結(jié)果表明,CANopen協(xié)議正常通訊,實現(xiàn)了公鐵兩用牽引車所需的運動狀態(tài),牽引車的運動速度誤差和轉(zhuǎn)向角度誤差在允許的范圍之內(nèi),保證了公鐵兩用牽引車的運動控制精度,實現(xiàn)了牽引車控制系統(tǒng)的運動控制。
[1]季曉丹.公鐵兩用車的發(fā)展歷程和趨勢[J].鐵道機車與動車,2015,(3):1-5.
[2]侯廣慧.GQ045型公鐵兩用牽引車液壓傳動及控制設計[J].液壓與氣動,2014,(4):25-27.
[3]余小波,左永博.新型蓄電池公鐵兩用車概述[J].裝備制造技術,2013,(4):129-130.
[4]韓成浩,高曉紅.CAN總線技術及其應用[J].制造業(yè)自動化,2010,33(2):146-149.
[5]Holger Zeltwanger,周立功,黃曉清,嚴寒亮.現(xiàn)場總線CANopen設計與應用[M].北京:北京航空航天大學出版社,2011:28-33.
[6]張厚林.CANopen通訊協(xié)議設計與實現(xiàn)[D].武漢:華中科技大學,2009:2-4.
[7]孟詔.基于CANopen協(xié)議的CAN總線控制系統(tǒng)研究[D].北京:北京工業(yè)大學,2008:21-29.
Motion control implementation of electric road/rail tractor based on CANopen protocol
ZHAO Da-xing, ZHAO Guo-dong, XU Wan, WANG Huang
運動控制單元是電動公鐵兩用牽引車控制系統(tǒng)的核心,控制系統(tǒng)主控制器采用CANopen協(xié)議進行數(shù)據(jù)通訊,為實現(xiàn)公鐵兩用牽引車的運動控制提供了可靠性高、實時性強的狀態(tài)獲取和命令下發(fā)通道。分析公鐵兩用牽引車機械結(jié)構(gòu)及主要參數(shù);設計牽引車運動控制CAN總線網(wǎng)絡,完成CANopen協(xié)議初始化設置;分析牽引車的運動速度和轉(zhuǎn)向角度,得出牽引車運動控制理論計算公式,為牽引車的運動控制提供了理論依據(jù)。測試結(jié)果表明,CANopen協(xié)議正常通訊,實現(xiàn)了公鐵兩用牽引車所需的運動狀態(tài)。牽引車的運動速度誤差和轉(zhuǎn)向角度誤差均在允許的范圍之內(nèi),保證了公鐵兩用牽引車的運動控制精度。
公鐵兩用牽引車;CAN總線;CANopen協(xié)議;運動控制
趙大興(1962 -),男,教授,博士,主要從事機械設計和機器視覺方向的研究。
TP273
A
1009-0134(2015)12(上)-0135-05
10.3969/j.issn.1009-0134.2015.23.40
2015-09-18
國家自然科學基金(51405144);湖北省自然科學基金面上項目(2014CF598);湖北省科技支撐計劃(2014BAA006)
