智能平面移動自動化車庫的研究
2015-05-30 00:45:10馬明初
中小企業管理與科技·上旬刊 2015年7期
馬明初
摘 要:近年來,城市家用汽車的擁有量在不斷上升,停車難的矛盾也越來越突出。大多數城市對于即將新建的樓盤,在規劃時,就開始嚴格控制車位數的配比,有的新建樓盤,規定一套建筑面積在100平米的住房,就需要配備一個車位,配比為1:1,有的城市配比還在不斷提高,達到1:1.5,甚至更高。但是,樓盤的面積一般都有限,地面上的平面車位,遠遠不滿足規劃車位數的要求,而往往地下開挖,增加地下車位的做法,成本會很高。所以,現在很多城市的新樓盤,在開始采用建地下智能平面移動自動化車庫來解決這種矛盾。
關鍵詞:智能;平面;自動化;車庫
智能平面移動自動化車庫,絕大部分安裝在大樓的地下室里,地下室很多是平常作為地下車庫用,戰時做為人防使用。在地面只需預留一個或幾個升降機井道口,通過升降機將汽車自動搬運到地下車庫里。所以,智能平面移動自動化車庫,能大大增加車位數,大大降低建車庫的成本。
1 智能平面移動自動化車庫的組成
智能平面移動自動化車庫,是集自動化技術、信息技術、計算機技術、機器人技術等多種高新技術為一體的智能化、立體化的搬運汽車存儲系統,它能夠快速、可靠地完成汽車的存、取,以及車庫相關信息數據的管理,比如車庫內剩余多少停車位數量的顯示、停車時間的記錄,停車費的收取。因城市寸土寸金,一般安裝在大樓的地下室里,可以充分利用地下土建的空間。
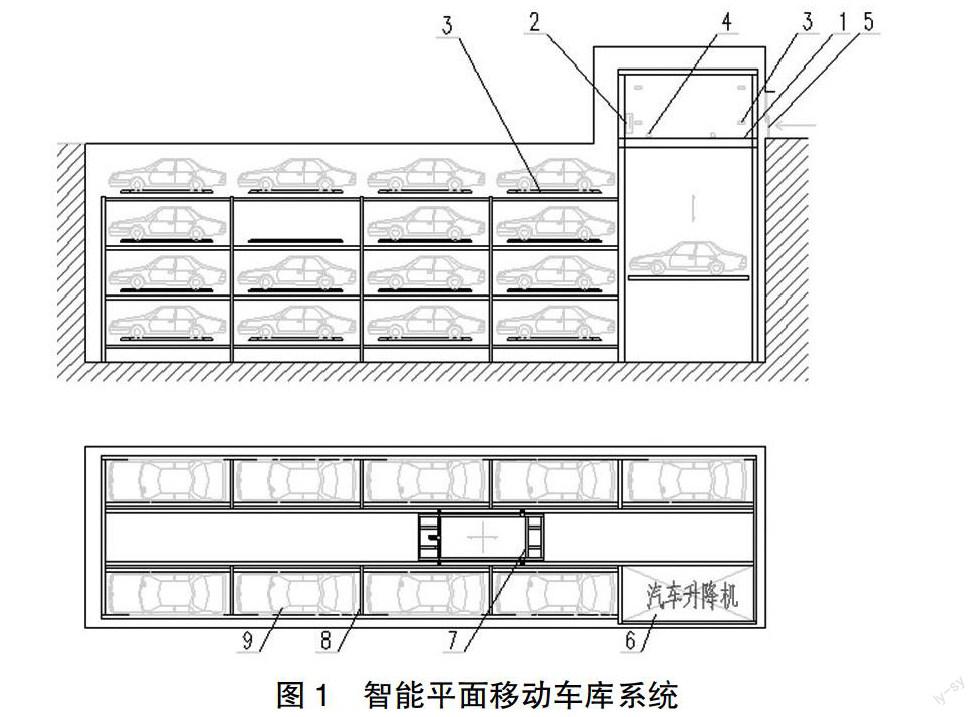
智能平面移動車庫系統,主要有1-出入口庫臺、2-入庫引導系統、3-汽車長寬高的檢測系統、4-汽車停偏糾偏系統、5-車庫自動門、6-汽車升降機、7-汽車搬運機器人(一般車庫每一層配置一臺)、8-鋼結構系統、9-泊位系統、10-刷卡操作系統、11-控制系統、12-數據通訊系統,還有收費系統、和視頻監控系統。如下圖1所示:
2 存取車動作原理
智能平面移動自動化車庫原理:設備采用全自動化的智能控制系統,系統一般有幾臺升降機,多臺搬運器,一般在系統的每一層都至少有一臺智能搬運器(或搬運汽車的機器人),負責本層的車輛存取,搬運器負責把泊位的汽車,運送到升降機處,升降機將不同停車層的汽車,送到出入口。駕駛員只需要將汽車停到出入口庫臺山,拉好手剎即可,存取車全過程均由系統自動完成。存取動作具體如下:
存車的駕駛員,首先將汽車開入平面移動車庫的出入口庫臺上,駕駛員根據入庫引導系統的指引,只需將汽車停在庫臺上,就可以走出庫外,到管理員處拿卡,通過刷卡就可以完成存車過程,刷卡后,系統開始工作,車庫自動門關閉,汽車升降機運行,自動將汽車準確地送入到地下車庫的某一層,比方說地下車庫負一層。同時,負一層的汽車搬運機器人也已經在運行,運行到升降機處,將汽車從升降機搬運到機器人上,然后機器人運行,將汽車送到某一泊位里。取車過程則相反。
3 智能平面移動常見的幾種形式
3.1 按汽車在車庫放置分
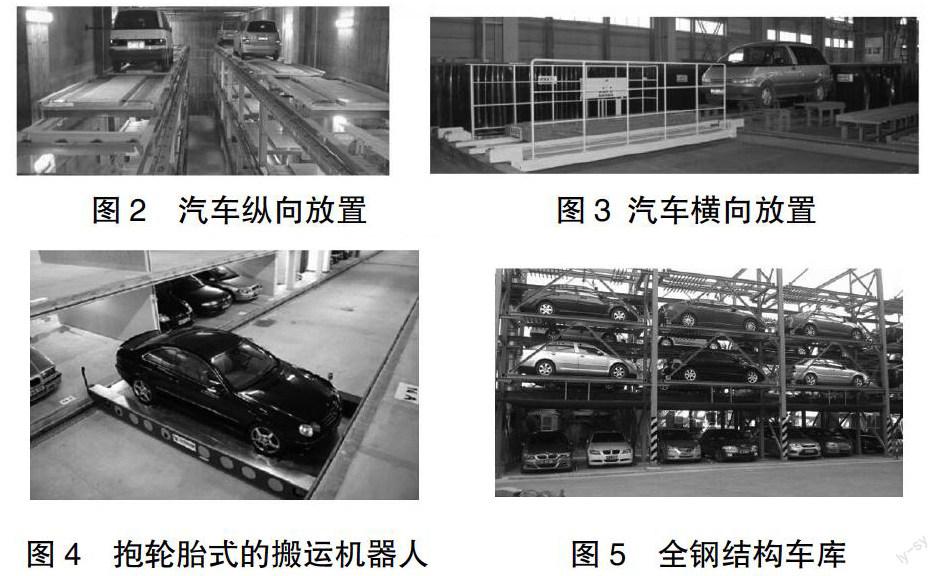
①汽車橫向放置式:即存取停車位上停放汽車的長度方向與搬運汽車的機器人或搬運小車運行的巷道長度方向垂直布置的停車設備。(見圖3)
②汽車縱向放置式:停車位上停放汽車的長度方向與搬運汽車的機器人或搬運小車運行的巷道長度方向平行的停車設備。(見圖2)
3.2 按升降機的提升方式分
①鋼絲繩提升:升降機采用鋼絲繩提升的運動進行汽車搬運的方式;
②鏈條提升:升降機采用鏈條提升的運動進行汽車搬運的方式;
③齒輪齒條提升:升降機采用齒輪齒條提升的運動進行汽車搬運的方式。
3.3 按搬運器存取機構的形式分
①托盤式的搬運器:是指汽車放置在泊位的托盤上,存取時,搬運器將托盤和托盤上的汽車進行搬送的方式。
②梳狀架式的搬運器:是指汽車放置在泊位的左右兩半的梳狀架上,存取時,搬運器直接運行到汽車下部,將汽車微微抬起進行搬送的方式。
③抱輪胎式的搬運機器人:是指搬運器運行到汽車底部,自動尋找汽車的4個輪胎,通過八個機械手臂將汽車的4個輪胎輕輕抱起,并將汽車送到停車混凝土樓板泊位上。(如圖4所示)
3.4 按設備的框架結構形式分
主要有全鋼結構的平面移動車庫和混凝土結構的平面移動車庫。(如圖5)
4 系統控制
智能車庫的升降機、汽車搬運機器人的電機均都采用進口品牌的電機減速電機來驅動。控制系統的電氣元件,如PC、觸摸屏、PLC、紅外通訊、激光測距、接觸器、光電檢測元件,均采用進口品牌的電氣元件。搬運器動力電源的取電方式采用導電滑觸線三相四線供電。各搬運器的PLC與主控制的PLC間采用無線紅外通訊。升降機的升降定位和搬運器的水平行走定位采用激光測距精確定位。主控上位機PC機,控制各系統中的主可編程序控制器(PLC),主PLC與各層搬運器PLC組成網絡進行控制。每一套搬運器是一個單獨的子系統,相互間獨立運行,因而不同層的搬運器可以同時運行,多層互動使整個系統的運行效率大大提高。
5 安全設置
因智能車庫屬于像電梯、起重機一樣的特種設備,為保障人員的安全、車輛的安全、和設備的安全。安全設置主要有:
5.1 人員安全
①出入庫臺的人員安全保證:設置有車庫門防夾人、夾車的運轉檢測裝置,有活動物體的人體檢測感應裝置。當智能車庫運行時,若檢測出意外的情況,系統立即停止運轉并報警。
②緊急停止按鈕裝置:在管理室設置有視頻監控,并在人機操作面板上設有緊急停止按鈕(大型紅色按鈕,在操作面板上),當遇到特殊緊急情況時,按下按鈕,則系統立刻緊急停止。緊急停止按鈕為自鎖匙的安全設計,一經按壓就一直呈現鎖定狀態,系統不會運轉。當狀態排出后,必須以手動將緊急停止開關以順時針方向旋轉才能解除開關的鎖定,恢復系統的運轉。
③車庫安全門裝置:出入口處設有安全門裝置,當設備開始運行的時候,安全門會自動關閉,確保設備在運行過程中不會有人員和汽車意外闖入。
④警示標語及操作說明:在機械設備的醒目位置,和車庫門外,設置有詳盡的警示標語,操作說明、注意事項告示牌、最大容車尺寸告示牌、倒車入庫或進入庫標識牌及公司電話和24小時服務電話等;在設備入口處貼有黑黃相間的反光膜,在夜間能有效起到警示作用,避免事故發生。
5.2 車輛安全
①車長、車寬、車高檢測裝置:在出入口庫臺位置,設置有光電檢測裝置,對停車入庫的汽車車輛的車長、車寬、車高進行檢測。限制超長、車寬、超高的車輛超限檢測裝置:設置的光電檢測裝置對停入車輛的長度、寬度、高度進行檢測,超長、超寬、超高車進入后,設備不能運行。
②前輪入庫定位和車輛停偏糾偏裝置:在庫臺上設置有汽車入庫的前輪阻擋定位裝置,并能檢測到汽車前輪是否到位。
③車輛停偏糾偏檢測,是指駕駛員把汽車停偏了,在庫臺設置有汽車糾偏裝置,自動把汽車停正。
④運行中設置有多重動態光電檢測:在升降機的上下運行中,在搬運器的水平運行中,設置有多重檢測汽車是否處在正確的安全位置。一旦出現不安全情況,光電開關會立即動作,設備停止運行,并報警,顯示故障狀態。
5.3 設備安全
①欠逆相保護裝置:控制回路對于動力電源欠相、反相時,自動予以檢出,并禁止電機運轉,以確保整套設備的安全。
②電壓保護裝置:在控制箱內設置有電源保護器,對過電壓及欠電壓進行雙重保護。當輸入電壓超過±20%時立即檢出,切斷系統的安全回路。
③電力過負荷保護裝置:當電機使用超過負荷時,過負荷保護裝置啟動,電機電源立刻切斷,保護馬達主機不至受損及載車板上車輛的安全。
④連鎖裝置:電腦程序設定車庫門、升降機、及搬運器定位點相互連鎖,防止升降機搬運器與智能搬運器產生重疊或碰撞,電腦程序亦可自動檢出行程時間,異常時可令電機斷電,停止運轉。
⑤安全限位:在升降機運行的上下末端,智能搬運器的水平運行末端,都設置有限位裝置,防止升降機或搬運器運行中沖出軌道,以免損壞設備或車輛。
⑥防重疊自動檢測:在智能搬運器將汽車送入某一泊位,搬運器能自動檢測出泊位上是否有無汽車,防止在同一車位重疊停車。
猜你喜歡
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
中國科技博覽(2016年19期)2016-10-19 14:47:24
中國科技博覽(2016年19期)2016-10-19 13:40:37
中國科技博覽(2016年18期)2016-10-19 07:01:13
中國市場(2016年36期)2016-10-19 03:40:15